Vorteile-Nachteile-Katalog |
|
A Positionserkennung des Kabels auf der RolleG Fehlererkennung: Kabelstörung |
A.1,G.1 Ultraschallsensor

Abb.: Ultraschallsensor
| Vorteile: | Nachteile: |
| - Kabeldichte und Kabelhöhe kann erkannt werden | - aufwändige Datenaufbereitung notwendig |
| - unabhänig von Umgebungslicht | |
| - Unempfindlich gegen Schmutz & Staub | |
A.2,G.2 Photoelektrischer Sensor

Abb.: Ultraschallsensor-
| Vorteile: | Nachteile: |
| - Einfache Detektion (Kabel vorhanden/ nicht vorhanden), keine Datenaufbereitung notwendig | - nur Detektion ob Kabel gerade läuft -> Position der Kabelführung ist richtig |
B Positionserkennung der Kabelführung |
B.1 Laser-Entfernungsmessung
Abb.: Prinzip Messung durch Laserreflexion
| Vorteile: | Nachteile: |
| - Absolutwegmessung | - mögliche Störung der Reflexion durch äußere Einflüsse, Verschmutzung des Reflektors |
| - Detektion des aktuellen Ortes auch bei Stillstand der Kabelführung möglich | - Laseraufbau teuer |
| - Berührungslose Messung | |
| - Verschleißfrei | |
B.2 Messung durch Induktivsensor
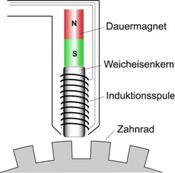
Abb. : Prinzip der Induktivmessung am Beispiel. ABS
| Vorteile: | Nachteile: |
| - realtiv günstiger Aufbau | - nur inkrementelle Messung |
| - Berührungslose Messung | - keine Ortsbestimmung im Stillstand möglich |
| - Verschleißfrei | - Profil notwendig, welches detektiert werden soll |
B.3 Potentiometrischer Sensor
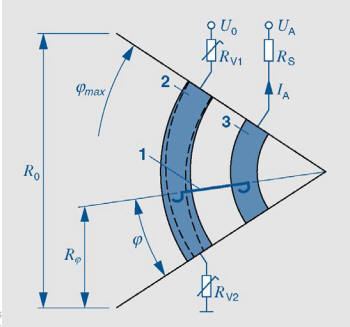
Abb.: Prinzip potentiometrische Messung
| Vorteile: | Nachteile: |
| - günstig | - unterliegt Verschleiß, da Messung nicht berührungslos erfolgt |
| - Absolutmessung der Position | - Messung rauscht |
| - Verschmutzung beeinflusst Messung | |
| - Erschütterungen/Vibrationen können die Messung stören | |
B.4 Feder und Drucksensor
 und
und 
Abb.: Feder in Kombination mit Druck/Zug Sensor
| Vorteile: | Nachteile: |
| - Absolutwert | - Ermüdung der Feder über die Jahre |
| - Feder günstig | - keine berührungslose Messung |
| - lange Feder notwendig | |
| - Platz notwendig um Feder völlig einzufahren | |
| - Sensor evtl. teuer |
B.5 Elektromotorfeedback Sensor

Abb.: Motorfeedbacksystem Fa. Sick
| Vorteile: | Nachteile: |
| - berührungslose Messung | - nur inkrementelle Messung |
| - kann direkt am Elektromotor platziert werden | - Es werden nur die Motorumdrehungen gemessen, Toleranzen durch Kraft-Übertragungssystem bleiben unberücksichtigt |
| - Motorumdrehungen werden genau gemessen | |
B.6 Bestimmen der Ansteuerungsschritte
Abb.: Mikrocontroller zur Schrittmotoransteuerung
| Vorteile: | Nachteile: |
| - keine zusätzliche Hardware nötig | - nur inkrementelle Messung |
| - berührungslose Messung | - Flashspeicher zur Speicherung der Daten unabdingbar (Ausfallssicherung) |
| - Motorumdrehungen werden genau gemessen | - Referenzposition bei Systeminitialisierung notwendig |
C Kabelführung: |
C.1 Rollenführung

Abb.: Führung durch Rollen
| Vorteile: | Nachteile: |
| - variable Kabeldurchmesser möglich | - aufgebrachter Druck darf nicht zu groß sein, da sich Kabel sonst unberechenbar verdrillt --> Folge ist Kontrollverlust über das Kabel |
| - Rollen laufen mit bei Auf- und Abwickeln --> geringerer Kabelstress im Vergleich zu statischer Lösung | - Läufe der Rollen müssen gewartet werden |
| - Möglichkeit der Druckaufbringung zur Spannung des Kabels | |
| - Schonung des Kabels durch mitdrehende Rollen | |
C.2 Führung durch 2 Rollen

Abb. : Führung durch 2 Rollen
| Vorteile: | Nachteile: |
| - Geringer Materialaufwand wie bei C.1 | - Muss beachtet werden, dass auf das Kabel aufgebrachter Druck nicht zu groß wird |
| - Geringerer Wartungsaufwand | |
| - Schonung des Kabels durch mitdrehende Rollen | |
| - variable Durchmesser möglich | |
C.3 Öffenbare Öse

Abb. Nr. : -Teilebezeichnung -
| Vorteile: | Nachteile: |
| - kostengünstig | - evtl. Abrieb/Verschleiß des Kabels |
| - sehr einfach Wartung | - Verschleißbehaftet |
| - muss größer gestaltet werden, als der maximal mögliche Kabeldurchmesser um Öffnung der Öse zu erlauben --> ungenauerer Positionierung möglich | |
D Aktuator zur Bewegung der Seilführung: |
D.1 elektrischer Linearmotor
Abb.: Linearmotor
| Vorteile: | Nachteile: |
| - dynamische Ansteuerung | |
| - Wartungsfrei | |
| - einfache Ansteuerung | |
| - Keine Elemente zur Kraftübertragung an Kabelführung notwendig | |
D.2 Schrittmotor

Abb.: Schrittmotor
| Vorteile: | Nachteile: |
| - genaue Ansteuerung möglich | - aufwändigere Ansteuerung |
| - relativ günstig | - Element zur Kraftübertragung an Seilführung notwendig |
| - Wartungsfrei | |
D.3 Servomotor

Abb.: Servomotor
| Vorteile: | Nachteile: |
| - Wartungsfrei | - Frequenzumrichter nötig |
| - genaue Ansteuerung möglich | - Element zur Kraftübertragung an Seilführung notwendig |
| - eher teuer | |
D.4 Linearer Schrittmotor

Abb.: linearer Schrittmotor
| Vorteile: | Nachteile: |
| - genaue Ansteuerung möglich | - größerer Einbauraum nötig |
| - durch schrittweise Ansteuerung aktuelle Position ermittelbar/abspeicherbar | |
E.1 Kraftübertragung Aktuator - Seilführung |
E.1.1 gegenläufige Doppelhelixschraube
- keine Abbildung vorhanden -
| Vorteile: | Nachteile: |
| - Automatischer Richtungswechsel bei Ende der Schraube | - für jede Trommelbreite ist eine andere Doppelhelixschraube nötig |
| - Muss nur in eine Richtung angetrieben werden | |
E.1.2 Riemenantrieb horizontal

Abb.: Riemenantrieb im Tintenstrahldrucker-
| Vorteile: | Nachteile: |
| - sehr günstig im Einkauf | - Abnutzung des Riemens |
| - verschiedene Riemenlängen können günstig eingekauft werden | - Richtungswechsel nur durch Drehrichtungsänderung |
| - für jede Trommelbreite ist anderer Riemen nötig | |
| - Zahnräder und Riemen kann verschmutzen | |
| - Porosität nach gewisser Nutzungsdauer | |
| - viel Einbauraum notwendig |
E.1.3 Gewindespindel

Abb.: Gewindespindel -
| Vorteile: | Nachteile: |
| - einfacher Aufbau | - Richtungswechsel nur durch Drehrichtungsänderung |
| - anpassen an verschiedene Trommelbreiten durch ablängen | |
E.1.4 elektrischer Linearmotor
Abb.: Linearmotor
| Vorteile: | Nachteile: |
| - dynamische Ansteuerung | - Etwas größerer Einbauraum nötig |
| - Wartungsfrei | |
| - einfache Ansteuerung | |
| - Keine Elemente zur Kraftübertragung an Kabelführung notwendig | |
E.1.5 Schlitten

Abb.: Schlitten
| Vorteile: | Nachteile: |
| - definierte Wegführung | - softwareseitige Anpassung der Trommelbreiten nötig |
| - eine Schlitten kann für alle Trommelbreiten verwendet werden | |
E.2 Kraftübertragung Aktuator - Seilführung |
E.2.1 Riemenantrieb

Abb.: Riemenantrieb im KFZ
| Vorteile: | Nachteile: |
| - sehr günstig im Einkauf | - Zahnräder und Riemen kann verschmutzen |
| - nur eine Riemenlänge notwendig | - Richtungswechsel nur durch Drehrichtungsänderung |
| - keine Schmierung notwendig | - Abnutzung des Riemens |
| - Porosität des Riemens wird gesteigert durch extreme Witterungseinflüsse | |
E.2.2 Kettenantrieb

Abb.: Kettenabtrieb am Fahrrad
| Vorteile: | Nachteile: |
| - sehr robust | - Kette kann verschmutzen |
| - nur eine Kettenlänge notwendig | - Richtungswechsel nur durch Drehrichtungsänderung |
| - Längen der Kette bei längerer Nutzung, Spanner notwendig | |
| - Schmierung notwendig | |
E.2.3 Zahnrrad

Abb.: Zahnrad
| Vorteile: | Nachteile: |
| - sehr robust | - Kette kann verschmutzen |
| - wenig Einbauraum nötig bei kleiner Auslegung | - Richtungswechsel nur durch Drehrichtungsänderung |
| - muss vor Schmutzeinflüssen gut geschützt werden | |
| - Schmierung notwendig | |
| - mindestens 2 Zahnräder notwendig | |
F Regelung des Aktuators |
F.1 Mikrocontroller
Abb.: Mikrocontroller
| Vorteile: | Nachteile: |
| - günstig | - EMV Verträglichkeit muss geprüft werden |
| - flexibel einsetzbar | - konstante Spannungsversorgung notwendig |
| - Änderungen sind leicht vorzunehmen | |
| - weniger Bauteile nötig, da viele Funktionen softwaremäßig realisiert werden können | |
F.2 Analogelektronik
Abb.: Analoge Schaltung
| Vorteile: | Nachteile: |
| - resistenter gegen Spannungsschwankungen | - unflexibel |
| - Änderungen nur durch Relayout der Platine möglich | |
H Fehlererkennung: Kabelführung-Systemstörung |
H.1 Diagnose durch Mikrocontroller
Abb.: Mikrocontroller
| Vorteile: | Nachteile: |
| - Überwachung aller angeschlossenen Aktuatoren und Sensoren möglich | |
| - Kommunikation mit Kran-Kontrollsystem möglich -- > Fehleranzeige im Führerhaus | |
H.2 Diagnose durch Analogelektronik Schaltung
Abb.: Analoge Schaltung
| Vorteile: | Nachteile: |
| - bei einfachen Schaltungen kostengünstig | - Änderungen erfordern ein Relayout der Platine |
| - Aufwändiger Schaltungsaufbaz | |
I Fehlererkennung: Kabelführung-Systemstörung |
I.1 Anzeige auf Cockpit Konsole

Abb.: Krankonsole
| Vorteile: | Nachteile: |
| - Integration ins vorhandene System | - Vorhandensein der Konsole ist notwendig |
| - einfache Ablesbarkeit | |
| - einfach nachrüstbar, wenn Konsole schon vorhanden ist | |
| - detaillierter Fehler anzeigbar | |
I.2 Anzeige im Cockpit durch LED

Abb.: LED
| Vorteile: | Nachteile: |
| - konstengünstig | - zusätzliche Anzeige im Cockpit nötig |
| - niedriger Stromverbauch | - keine detaillierte Fehleranzeige |
| - geringer Integrationsaufwand | |
I.3 Anzeige im Cockpit durch LCD

Abb.: LCD
| Vorteile: | Nachteile: |
| - einfach nachrüstbar | - zusätzliches LCD muss in das Cockpit integriert werden |
| - niedriger Stromverbauch | |
| - detaillierter Fehler anzeigbar | |
|
|