Hinweis: An dieser Stelle kann leider nur ein kleiner Teil der Ergebnisse veröffentlicht werden. Weitere Informationen und eine
vollständige Zusammenstellung ist bei Jeromin Schwenk einsehbar.
Eigene Software
Die von uns selbst geschriebene Software dient zum Anstoßen einer Radarmessung sowie der anschließenden Auswertung durch die Firmware des Radarmoduls. Es nutzt dabei ein
Python-Softwaremodul, welches uns freundlicherweise von IMST zur Verfügung gestellt wurde. Dieses Modul übernimmt einen großen Teil der seriellen Kommunikation über
das FTDI-Kabel. Aus diesem Grund wurde auf eine Portierung in C verzichtet, da der Nutzen - eine einfachere Implementierung auf dem Mikrocontroller STM32F4 - im Vergleich
zum Aufwand - dem Umsetzen der kompletten seriellen Kommunikation in C unter Windows - in keinem Verhältnis steht und ein Student im Folgeprojekt mit soliden C/C++-Kentnissen
den Python-Code ohne großen Aufwand lesen und verstehen kann.
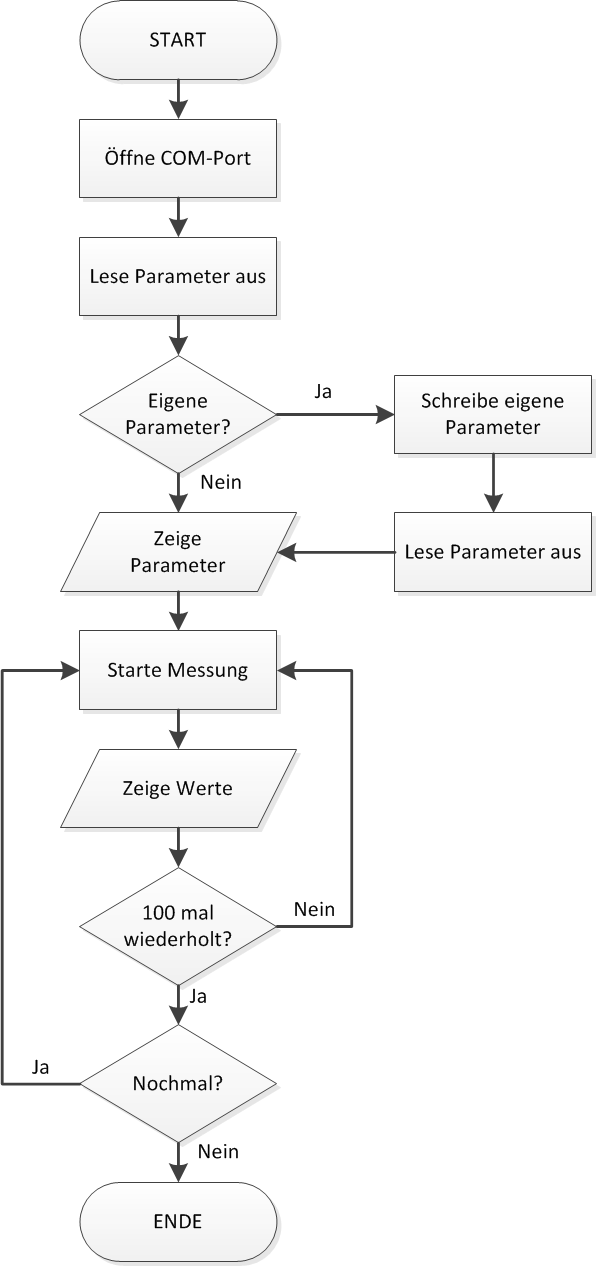
Programmablaufplan. Quelle: Eigenes Werk
Testläufe
Um die Stabilität und Zuverlässigkeit der von uns geschriebenen Software sowie der von IMST zur Verfügung gestellten Software zu untersuchen wurden
zwei Versuchsreihen durchgeführt. Dazu wurde das Radarmodul auf ein handelsübliches Kamerastativ montiert, mit einem PC verbunden und dann die jeweilige Software gestartet.
Die erste Testreihe wurde im Labor Li U22 durchgeführt (s. Bild unten). Es zeigte sich jedoch, dass aufrund der größeren Menge an Objekten im Raum keine eindeutigte
Entfernungsmessung zustande kam. Erst mit einer stark erhöhten Bandbreite des Radarsignals lies sich eine korrekte Messung durchführen. Eine Bandbreite von über 250 MHz
ist jedoch im ISM-Band von 24,0 GHz bis 24,25 GHz unzulässig (Quelle: Bundesnetzagentur,
Allgemeinzuteilung von Frequenzen [PDF]).

Test in Li U22 Quelle: Eigenes Werk
Für einen realistischeren Feldversuch wurde die Aula im A-Bau der Hochschule Karlsruhe genutzt. Das Radarmodul wurde wieder auf einem Stativ montiert und auf der Empore
aufgestellt (s. Bild unten, rechts im Bild). Die Entfernung zwischen Radarmodul und Leindwand betrug rund 17 Meter. Bei diesem Versuch konnte die Entfernung bereits
bei einer geringeren Bandbreite stabil erfasst werden.

Test in der Aula der HSKA. Quelle: Eigenes Werk
Ausblick
Die IMST GmbH hat bereits ein Nachfolgemodell des verwendeten Radar-Moduls angekündigt, welches sich jedoch derzeit noch in der Entwicklung befindet. Die
besonderen Merkmale sind ein leistungsfähigerer Mikrocontroller sowie die Verfügbarkeit eines Gehäuses, welches die Schutzklasse IP65 bietet. Das gesamte
Modul mit Gehäuse ist CE-zertifiziert.

Neues Radar-Modul. Quelle: IMST GmbH
Für das neue Modul ist bereits ein vorläufiges Datenblatt [PDF]
verfügbar. Die Kommunikation kann wahlweise nativ über USB sowie über SPI stattfinden. Die weiteren technischen Eigenschaften unterscheiden sich nur in Details von
denen des derzeit verwendeten Radarmoduls. Die Empfehlung seitens IMST lautete, das bisherige Modul weiterhin zu verwenden, für einen Einsatz im Außenbereich dann
auf das neue zu wechseln.
Darüber hinaus bietet IMST sogenannte Training Courses für Benutzer und Entwickler, welche das IMST Radarmodul verwenden, an
(Link zur Website). Diese beinhalten von allgemeinem Know-How zum Thema Radar bis hin
zum Programmieren einer speziell angepassten Firmware die verschiedensten Einheiten.
Die derzeitige Firmware auf dem Radarmodul führt einen Object-Tracking-Algorithmus durch. Hierbei wird versucht, ein einmal detektiertes Objekt durch seine
charakteristische Reflektion der elektromagnetischen Wellen sowie der Position und deren Änderung wiederzuerkennen. Dies ist für den Einsatz als Radioaltimeter
tendenziell hinderlich und sollte ggf. durch eine Firmware ersetzt werden, die in Abhängigkeit vom Winkel die Entfernung zum nächsten Hindernis ausgibt.
Für eine anschließende Verwendung mit dem STM32F4 ist die Implementierung der UART-Schnittstelle sowie eine Umsetzung des von uns erstellten Pythonscripts in C notwendig.