Funktionsstruktur |
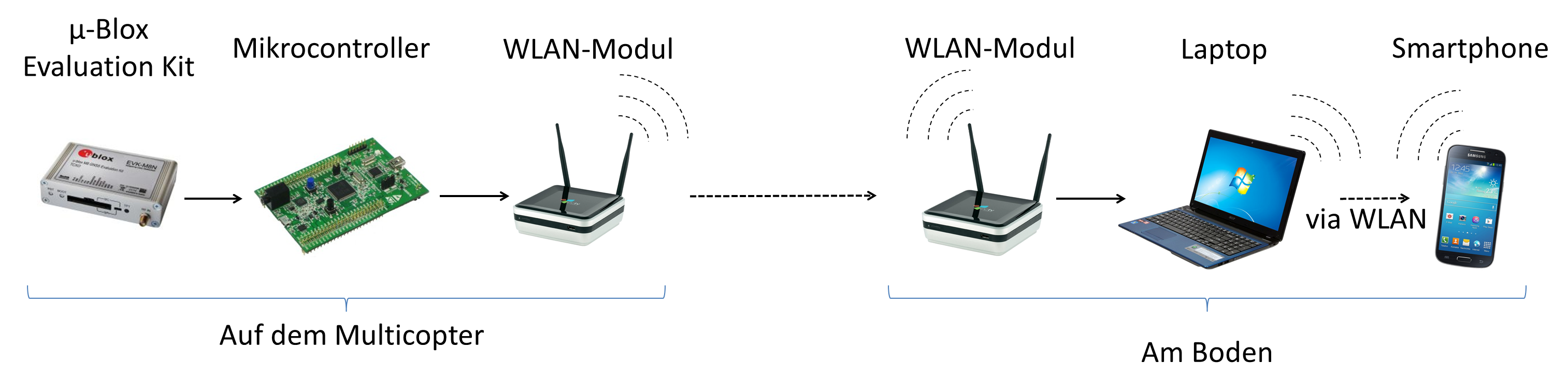
Um den Weg der Datenübermittlung anschaulich darzustellen, wurde ein Abfolgediagramm erstellt. Das Evaluation Kit von µ-Blox befindet sich auf dem Mulicopter und ermittelt die GPS-Koordinaten des Multicopters. Die GPS-Daten werden von einem Microcontroller auf dem Multicopter ausgelesen, ausgewertet und sollen in Zukunft via WLAN zueinem Computer am Boden übermittelt werden. Der Computer am Boden archiviert die empfangenn Daten und sendet die empfangenen GPS-Daten weiter an ein Second-Screen Gerät.
Da das µ-Blox Evaluation Kit auf dem Multicopter und die zweite µ-Blox Einheit zum Programmieren benötigt wurden, war das Arbeiten mit einem echten µ-Blox Signal nicht möglich. Die WLAN-Verbindung vom Mulicopter zu einem Laptop, sollte erst im Rahmen eines zu unserem Projekt parallel laufenden Projekts erstellt werden, sodass wir auch auf dies nicht zurückgreifen konnten. Dadurch entstand die Notwendigkeit unser Projekt unabhängig von der Hardware des Multicopters und von dem erst in Zukunft verfügbaren WLAN zu machen.
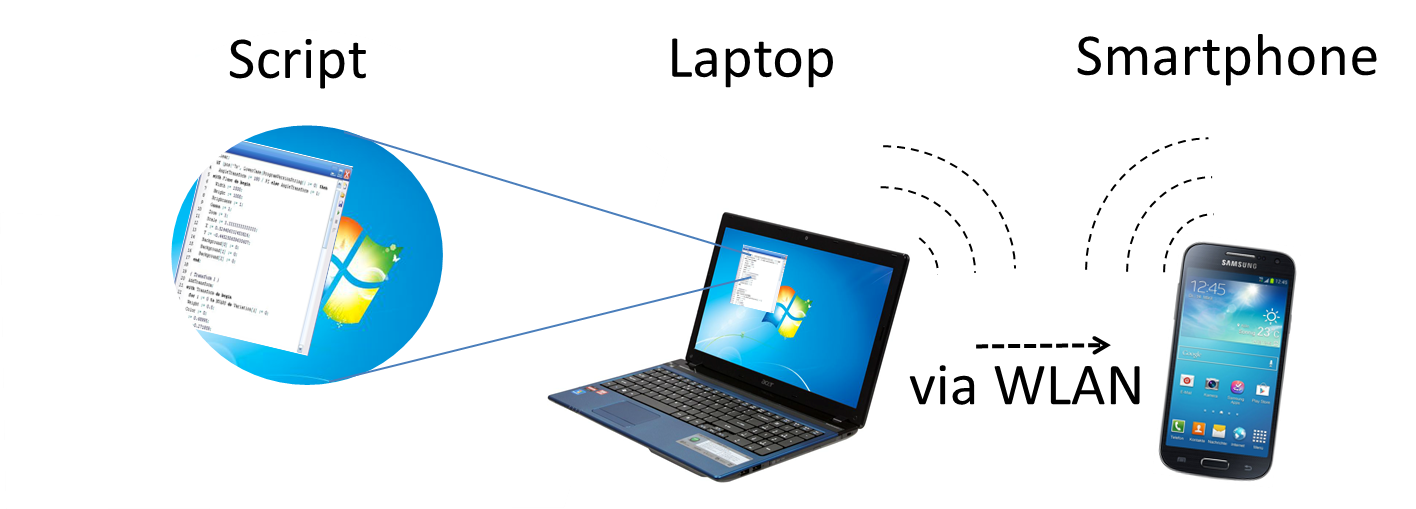
Um das nötige Eingangssignal zu erhalten, soll ein Skript auf dem Computer die Datensätze des µ-Blox Evaluation Kits nachbilden. Die Daten werden anschließend mit einem selbst erstellten WLAN vom Computer an das Smartphone übermittelt, welches bei Verlust des Positionssignals ein Alarmsignal ausgibt.
|
|