Ausarbeitung |
|
Konstruktion
Konzept
Um eine möglichst
realitätsnahe Abbildung zu erstellen, sollte das 4:1 Model des Hexacopters als
Vorbild genommen werden. Des Weiteren wurden auch hier schon viele Bauteile als
Vorgabe verwendet. Das waren zum einen der komplette Aufbau der Ausleger, also
Abmessungen des CFK-Rohrs, zu verwendende Auftriebseinheiten, Motorhalterungen
und die Scharniere zur Befestigung der CFK-Rohre am Multicopter. Ein weiteres
Merkmal war die zu beachtende Sandwichbauweise des Multicopters. Als Lagerung
wurde ein Stehlager der Firma Igus eingeplant, da dieses alle rotatorischen
Freiheitsgrade ermöglicht. Bei dem Lager handelt es sich um den Typ ESTM-16 da
dieser die genau passenden Masse aufweist, wodurch keine weiteren Adapter
benötigt wurden. Die Lager bieten zwar nur in einer Rotationsachse die vollen
360° Drehbewegung, dies ist allerdings vollkommen ausreichend, da eine
Auslenkung von einer ganzen Umdrehung nicht erforderlich ist.
Lager ESTM-16:
Wie auf den
Abbildungen zu sehen, ist nur eine Achse in der Lage, die vollen 360° Drehung zu
ermöglichen. Die Beiden anderen Achsen ermöglichen einen Winkel von 22°. Dieser
ist aber ausreichend, da der spätere Aufbau dazu dienen soll, die Regelparameter
so einzustellen, dass es keine Abweichungen gibt. Das heißt, das Ziel ist es,
den Aufbau immer im Nullpunkt zu halten. Daher erfüllt das Lager alle nötigen
Voraussetzungen für den Aufbau.

CAD Modellierung
Wippe
Die Wippe ist das Herzstück
des Aufbaus, da sie alle erforderlichen Bewegungen ermöglicht. Abbildung 5 zeigt
den Aufbau mit dem Stehlager der Firma Igus, sowie den Sandwichaufbau in dem die
Ausleger mit ihren Antriebseinheiten verbaut sind. Die beiden Platten des
Sandwichaufbaus werden aus 3mm Aluminiumblech gefertigt, im Original 4:1 Model
sind diese Teile aus CFK gefertigt. Das Aluminium wurde hier gewählt, da es eine
höhere Flexibilität bietet, wenn es zu Umbauten und Erweiterungen kommt.
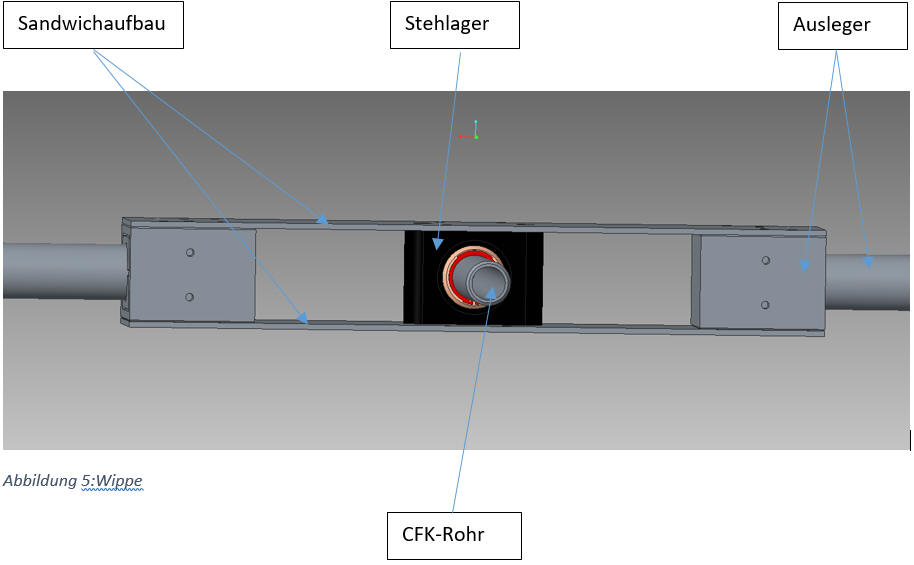
Als Lagerungsachse der Wippe wird ein CFK-Rohr verwendet um Gewicht einzusparen und so möglichst realistische Messwerte zu erhalten.
Als Nächstes wurde ein Träger benötigt der gleichzeitig mehrere Funktionen erfüllt.
1. Aufnahme der Lagerungsachse
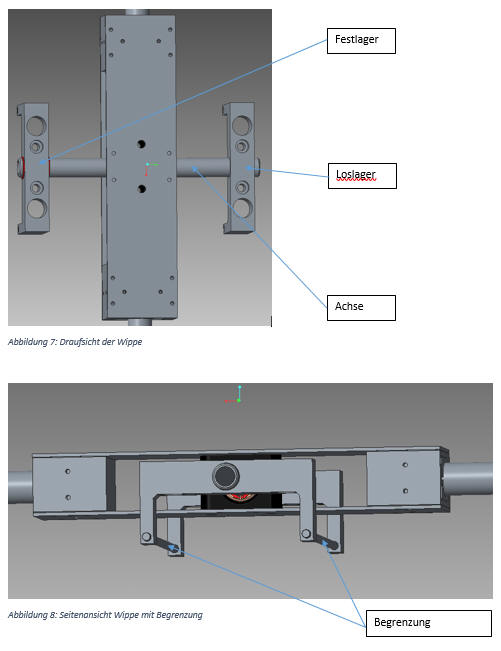
Es
wurde ein Konzept von Fest- und Loslagerung gewählt, da der Träger an zwei
Seiten der Achse befestigt wurde. Das Festlager verhindert das seitliche
Wegrutschen der Achse. Das Loslager stützt die Achse zusätzlich ab. Durch diesen
Aufbau werden Spannungen durch die Lagerung verhindert. Zusätzlich sollte die
Achse noch drehbar gelagert bleiben. Daher wurden auf der Achse Sicherungsringe
angebracht.
2. Führung der vertikalen Bewegung
Die Wippe wird durch Linearführungen geführt um vertikale Bewegungen zu
ermöglichen. Die Linearführung wurde durch vier Führungsachsen realisiert (siehe
späterer Abschnitt). Der Träger dient hier als Lagerung der Wippe und
Verbindungsstück.
3. Begrenzung des Wipp Winkels
Da eine Drehbewegung um volle 360° nicht notwendig ist, sowie zusätzliche
Sicherheitsrisiken birgt, wird noch eine Begrenzung des maximalen Winkels
benötigt. Dazu wurden 2 Ausleger konstruiert an denen Stangen befestigt werden,
die unter der Wippe entlangführen und als Anschlag dienen. Durch diesen Aufbau
ist immer eine Begrenzung des Winkels möglich unabhängig von der momentanen
vertikalen Position des Aufbaus.
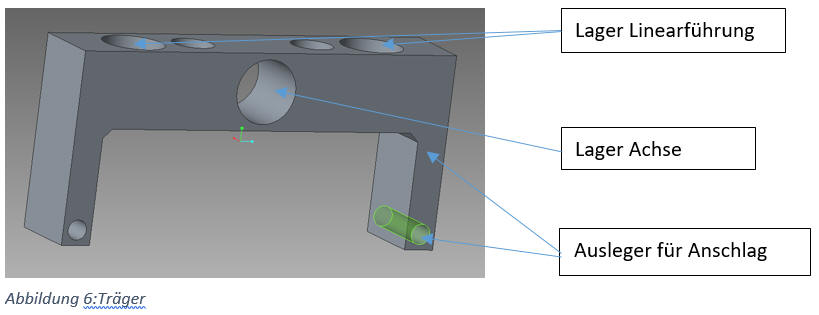
Aufgrund der benötigten tribologischen Eigenschaften des Trägers wird dieser aus Iglidur Filament im 3D-Druckverfahren hergestellt.
Auf den beiden nachfolgenden Bildern ist der fertige Aufbau der Wippe zu sehen.
Gestell:
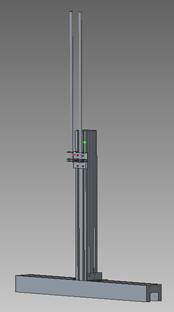 Das
Gestell soll die Wippe in ihrer Position halten. Dafür ist ein Mindestgewicht
von 20kg erforderlich, da dies in etwa der Auftriebskraft der Motoren
entspricht. Des Weiteren sollte das Gestell auch noch leicht demontierbar und
erweiterbar sein. Daher fiel hier die Wahl auf Aluminiumprofile die ein
ausreichendes Gewicht haben und durch den Profilaufbau die nötige Flexibilität
bieten. Das gesamte Gestell besteht aus zwei identischen gespiegelten Teilen.
Dadurch ist eine einfache Montage und Demontage des Aufbaus möglich, um diesen
auch zu transportieren. Außerdem ist durch die Konstruktion und leichte
Veränderungen auch ein Umbau für das 1:1 Model der Wippe möglich.
Das
Gestell soll die Wippe in ihrer Position halten. Dafür ist ein Mindestgewicht
von 20kg erforderlich, da dies in etwa der Auftriebskraft der Motoren
entspricht. Des Weiteren sollte das Gestell auch noch leicht demontierbar und
erweiterbar sein. Daher fiel hier die Wahl auf Aluminiumprofile die ein
ausreichendes Gewicht haben und durch den Profilaufbau die nötige Flexibilität
bieten. Das gesamte Gestell besteht aus zwei identischen gespiegelten Teilen.
Dadurch ist eine einfache Montage und Demontage des Aufbaus möglich, um diesen
auch zu transportieren. Außerdem ist durch die Konstruktion und leichte
Veränderungen auch ein Umbau für das 1:1 Model der Wippe möglich.
Berechnungen:
Um die Abmessungen des
Gestells zu bestimmen, waren bestimmte Abmessungen wichtig um zu verhindern,
dass drehende Teile des Aufbaus das Gestell berühren.
Berechnung Mindesthöhe:
Stehlager(Drehpunkt) -> Rotorkante: 1225 mm ; Winkel
Auslenkung 20°
Berechnung Mindesthöhe Wippe um Kontakt mit dem Boden
auszuschließen.
h=sin(20°)*1300mm=444,6mm
Um etwas mehr Spielraum zu erhalten, wurde die Länge
mit 1300mm angenommen und eine Mindesthöhe von 500mm festgelegt.
Berechnung Auslenkung der Wippe zur Seite:
l=sin(15°)*125mm=32,35
Hier wurde mit 15° anstelle 11°
Auslenkung gerechnet um etwas Toleranz bei späteren Änderungen zu haben.
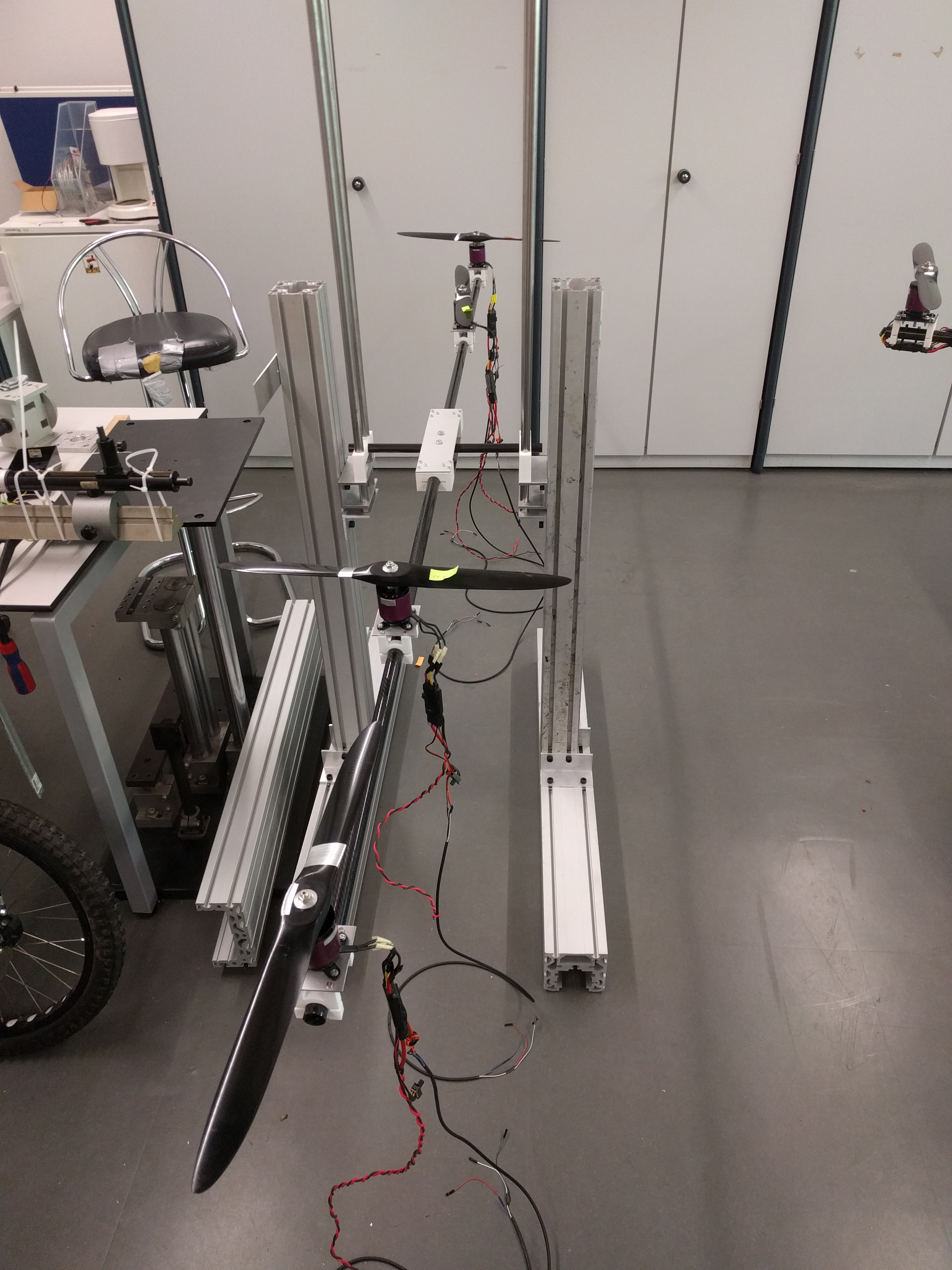
Nachfolgend noch einige Bilder des fertigen
Aufbaus:

|
|