In
diesem Abschnitt wird der Stand der Technik
jeder vorherigen relevanten Arbeit für dieser
Entwicklung berücksichtig werden.
Swimming Pixel
Hardware
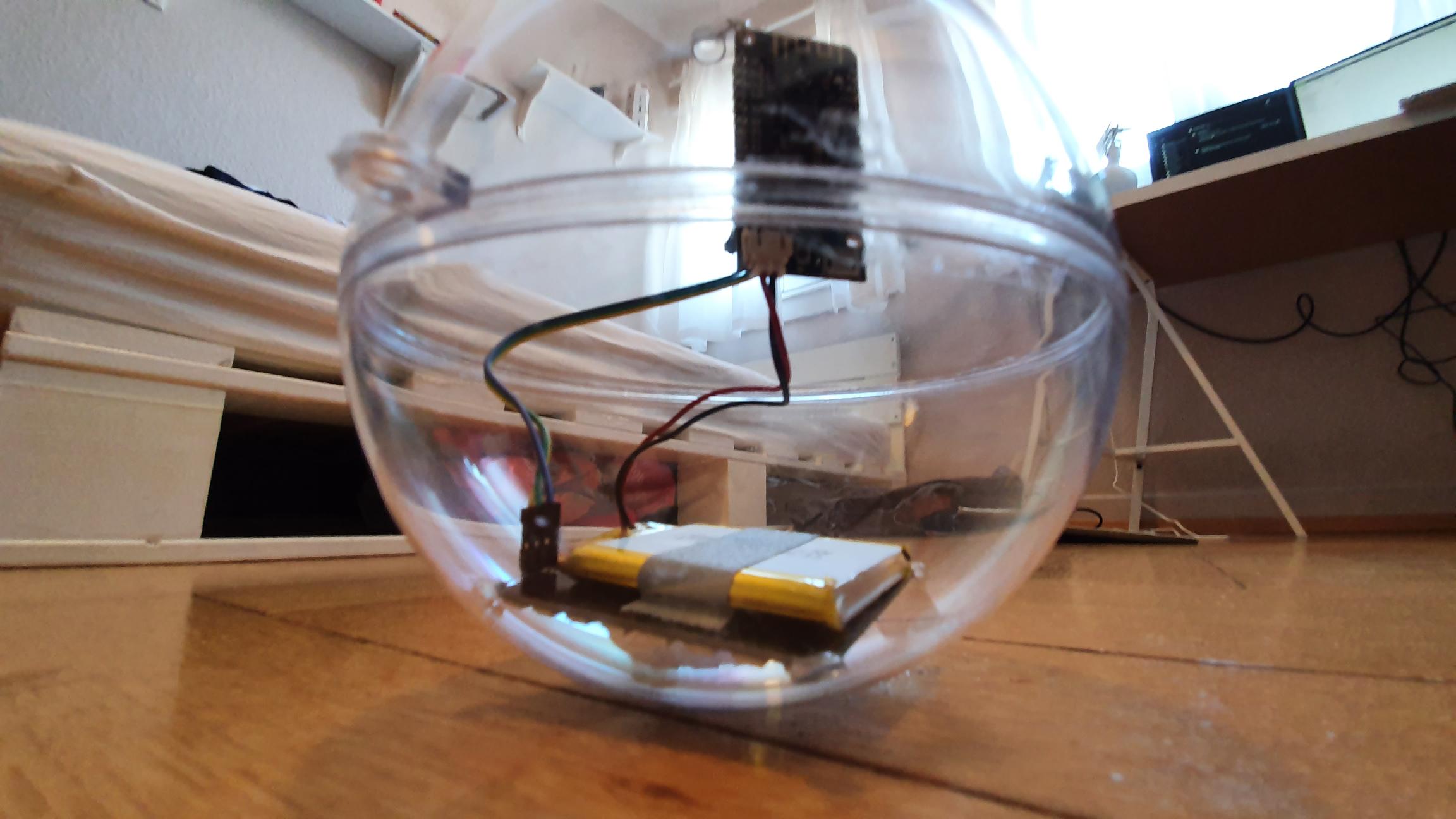
Die in der letzten
Entwicklung (Link) verwendete Hardware für den Swimming
Pixel und das Konzept der Verankerung auf dem
Wasser sind in den folgenden Bildern
dargestellt.
Der Ball wird vor Ort
von Menschen manuell fixiert. Damit er nicht
irgendwo aufschwimmt, werden zur Fixierung auch
einfache Anker und Angelschnur verwendet.
Als Hauptsteuerung wird
ESP32 basiertes Microcontroller, nämlich Lolin32
verwendet. Dazu ist 3.7V LiPo-Batterie mit
2500mAh auch verwendet.
Software und
MQTT-Ansteuerung
Es gibt 2 Arten von MQTT
Ansteuerung in letzten Entwlicklungen
Arduino Code
Website
Broker
Fischer Technik Robot
Bis zum Sommersemester 2019 wurde das Fischer
Technik Auto als Basis für eMalRob verwendet. (Letzte
FT32 Projekt)
Dieser Roboter kann wie ein Lego-Modell beliebig
zusammengebaut werden. Der Hauptbestandteil
dieses Roboters besteht aus 2 modularen Geräten:
der Steuerplatine im 3D-gedruckten Gehäuse und
den Fischer Technik Motoren.
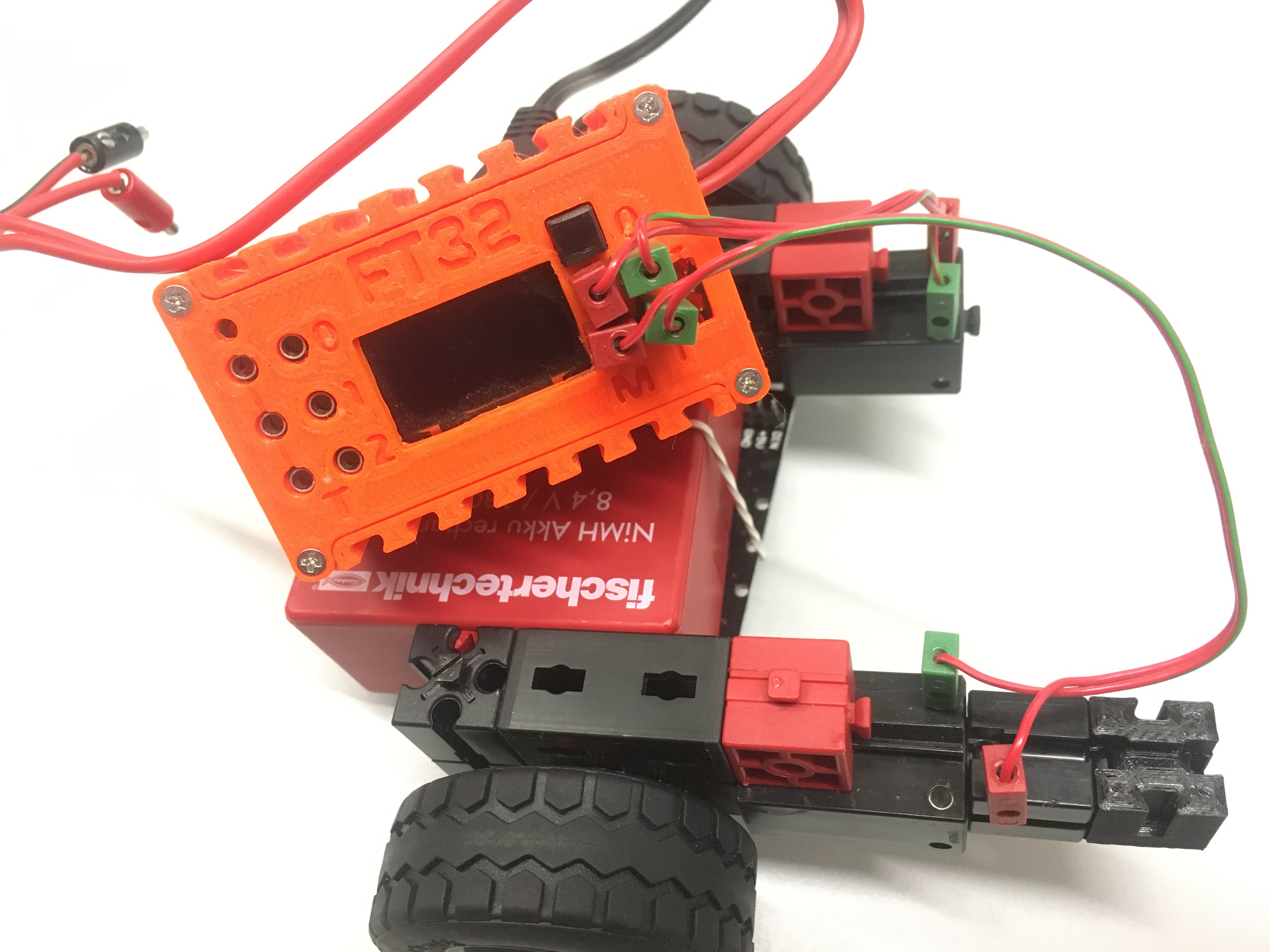
Der Fischertechnik-Roboter besteht aus
kleinen Bauteilen, die wie Lego zusammengesetzt
werden können, der Steuerbox und den Motoren.
Da
diese Roboter und ihr Zubehör bereits
existieren, aber für die aktuelle Entwicklung
des eMalRob nicht mehr verwendet werden, soll
dieser Roboter als Basis für die Bewegung der
Swimming Pixels verwendet werden.
Steuerung
der Fischer Technik Robot
Der
Fischer Technik Roboter verwendet jedoch Cody++
zur Programmierung, da dieser Roboter als
Spielgerät eingesetzt wird, um Schülern das
Programmieren beizubringen. Allerdings macht
Cody++ die Steuerung des Balls komplizierter.
Daher ist es besser, eine eigene Steuerung auf
Basis von MQTT zu verwenden, dem gleichen
Protokoll wie bei der Steuerung der Beleuchtung.
Als Basis für die Steuerung
der Motoren mit Fischer Technik Robot kann den
Code von diesem Link verwendet werden. (Link
Fischer Technik mit Websocket)
Rotierende Kugel

(Quelle:
https://www.youtube.com/watch?v=D2BUoU-oGl4)
Im Embedded Mechatronics
Lab wurde eine "Landkugel" zu einer
"Wasserkugel" entwickelt. Das Bewegungsprinzip
dieser Kugel besteht aus Aktoren in der
Innenkugel, die die Oberfläche der Kugel zur
Rotation antreiben können.
Mit dem Fischer Technik
Auto kann eine einfache Bauweise konstruiert
werden, wobei mit Hilfe der 2 Räder die Kugel in
4 Richtungen rotierend gefahren werden kann.