|
|
Bachelorarbeit Induktives Laden von Fahrzeugen - Jakob Bisinger |
Wintersemester 2020/21 Jakob Bisinger |
|
|
Bachelorarbeit Induktives Laden von Fahrzeugen - Jakob Bisinger |
Wintersemester 2020/21 Jakob Bisinger |
|
|||
|
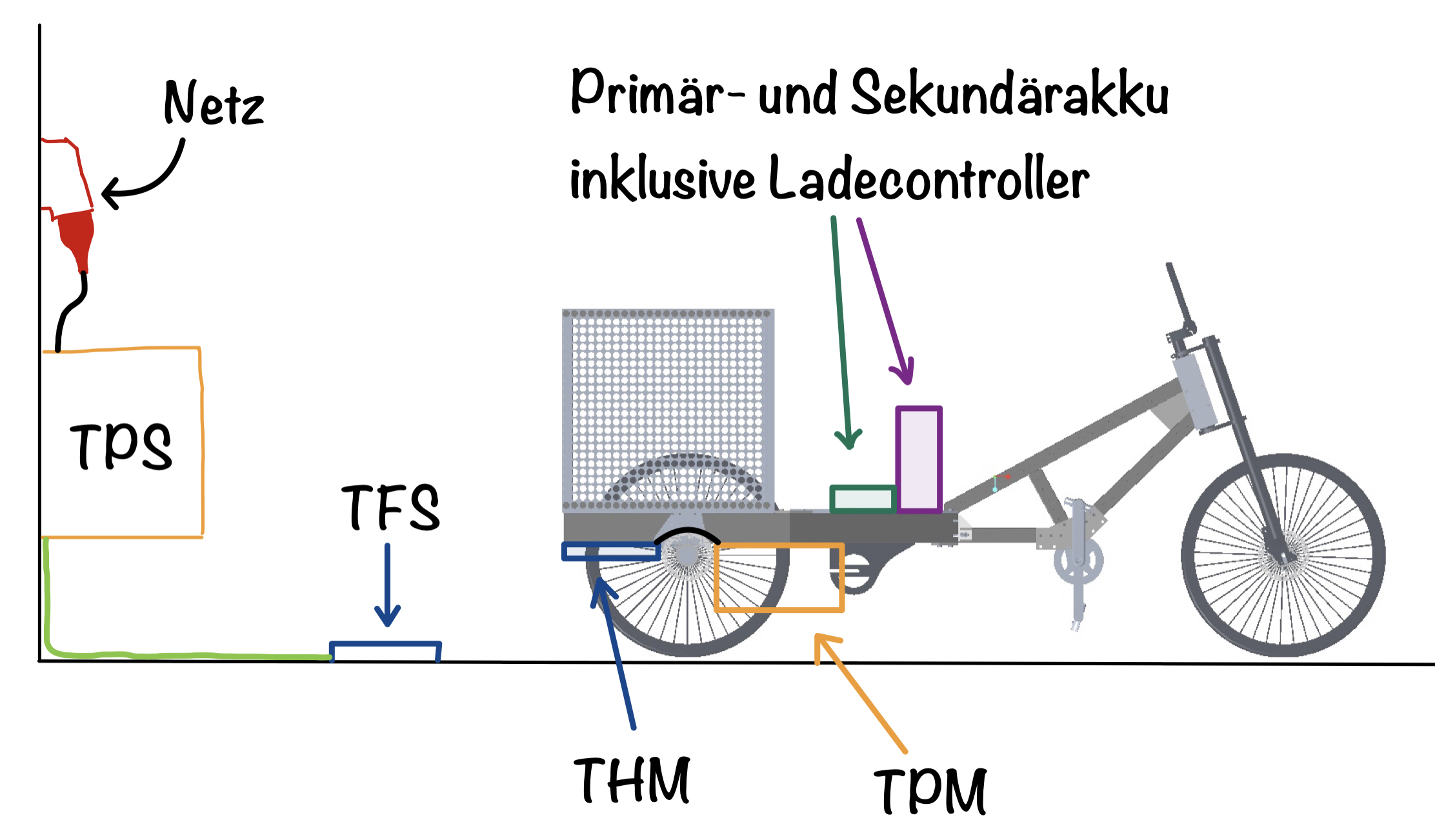
Der gesamte Funktionsablauf der induktiven
Ladung wird in die folgenden Einzelstationen und Komponenten
aufgeteilt. Dabei wird unterschieden zwischen stationäre und mobile
Komponenten. Die stationären Komponenten sind am Gebäude oder
Ladeort montiert und am Stromnetz angeschlossen. Die mobilen
Komponenten befinden sich an der E-Rikscha unter der Transportbox,
um dort eine gute Wärmeabfuhr und Erreichbarkeit zu gewährleisten.
Abbildung: Funktionspictogramm, nicht maßstabsgetreu Einspeise-Steller TPS (stationär) Dieser wandelt die Wechselspannung des
Drehstromnetzes, welches eine Frequenz von 50 Hertz hat, in
hochfrequente Wechselspannung mit 25k Hertz. Feldplatte TFS (stationär) Diese am Boden befestigte Feldplatte induziert
die durch den Einspeise-Steller erhaltene Spannung in den durch
einen Luftspalt getrennten Übertragerkopf. Alternativ kann hier auch
ein Linienleiter verwendet werden. Dieser ermöglicht mit den
entsprechend Ausgelegten Komponenten eine Energieübertragung während
einer bestimmten Strecke. Flacher Übertragerkopf THM (mobil) Der Übertragerkopf THM 10 E ist das Gegenstück
zur Feldplatte. Er empfängt die hochfrequente Wechselspannung und
leitet sie weiter. Anpass-Steller TPM (mobil) In dieser Komponente wird die empfangene
Spannung gleichgerichtet und auf 500 Volt und 24 Volt transformiert. DC-DC-Konverter (mobil) Der Gleichstromkonverter wird benötigt, um die
empfangene Spannung von 500 Volt auf einen nutzbaren Wert zu
reduzieren. So beträgt die Akkuspannung des Primerakkus 36 Volt und
die der Elektronik-Versorgungs-Batterie 22,2 Volt. Optimal wäre
daher eine Ausgangsspannung von 48 Volt. Ladecontroller Primärakku (mobil) Der Ladecontroller des Primärakkus ist dafür zuständig, den Akku zu laden und die Gefahr von einer Überladung zu reduzieren. Manche Ladecontroller besitzen zusätzlich noch die Möglichkeit eines Cell-Balancing. Dieses ist dafür zuständig, die einzelnen Spannungen der Akkuzelle aneinander anzupassen. Primärakku (mobil) Der Primärakku versorgt ausschließlich den
Motor der E-Rikscha mit Spannung. Er ist nicht für die anderen
Komponenten verantwortlich und benötigt seinen eigenen
Ladecontroller. Ladecontroller Sekundärakku (mobil) Wie auch der Ladecontroller des Primärakkus hat
auch dieser die Aufgabe, den Akku sicher zu laden. Sekundärakku (mobil) Dieser Akku versorgt sämtliche Elektronik mit
Spannung. An ihn ist der ESP32 angeschlossen, welcher die Blinker
und Bremslichter ansteuert. Auswahl der Komponenten:
Bei der Auswahl der Komponenten stehen uns
mehrere Produktgruppen von SEW zur Verfügung. Der übergeordnete Name
der Produktreihe lautet MOVITRANS und beinhaltet Komplettlösungen
zur kontaktlosen Energieübertragung. Die Bauteile der Produktreihe
unterscheiden sich dabei in Funktionsumfang, Größe, Leistung und
Komplexität. Zur Auswahl stehen die in der
Morphologie
aufgeführten Bauteile. Da alle Komponenten der verschiedenen
Lösungskonzepte die benötigte Leistung des E-Rikscha
Ladecontrollers um mindestens Faktor 8 übertreffen, kann das
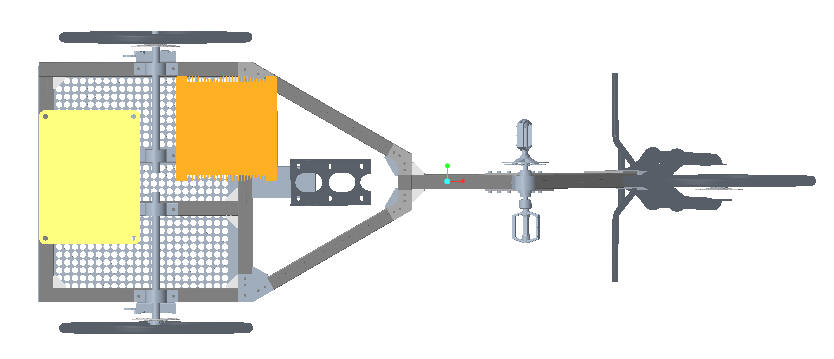
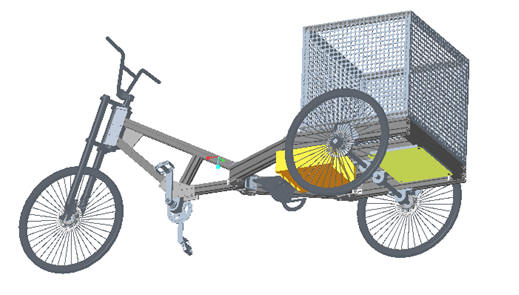
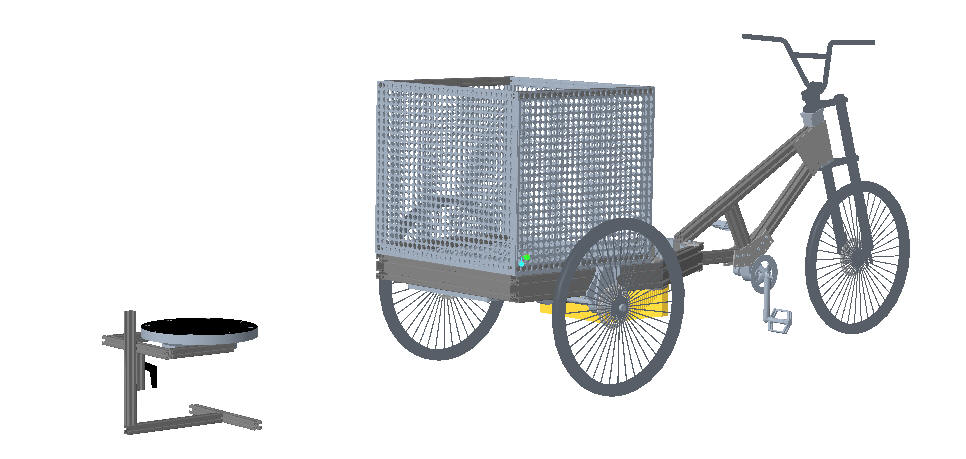
Hauptaugenmerk auf die anderen Kenngrößen gelegt werden. Bei der Größe unterschieden sich die einzelnen Lösungsvarianten. So muss bei der Lösungskomponente 1 sowohl eine Empfängerplatte als auch ein Anpass-Steller verbaut werden. Dieser Anpass-Steller, welcher die Spannung der Empfängerspule gleichrichtet und auf einen definierten Spannungspegel transformiert, bedarf jedoch viel Platz, weshalb er entweder zusammen mit der Ladespule hinten unter die E-Rikscha verbaut werden muss oder bei einer seitlichen Anbringung den Raum bis zur Mittelachse der Rikscha beansprucht. Die seitliche Anbringung hat hierbei den Vorteil, dass die Ladespule mittig angebracht werden kann und somit ein einfacheres Anfahren des Ladepunktes ermöglicht.
Abbildung: Rikscha von unten mit Empfängerspule (gelb) hinten mittig und Anpass-Steller (orange) links außen
Die zweite Möglichkeit ist das Verwenden der
Induktionsspule TDM 80 E, welche den Anpass-Steller bereits
integriert hat. Diese existiert in zwei Varianten mit
unterschiedlicher Baugröße. Die kleinere Variante ist hierbei auf
die punktuelle Aufladung limitiert, was bei unserer Aufgabenstellung
der stationären Aufladung kein Problem darstellen sollte. Nachteil
dieser Komponente ist die zwingend erforderliche Speicherzelle
(EKV). Leider ist hierfür aufgrund der erst
geschehenen Markteinführung noch keine Dokumentation online
verfügbar und auf eine entsprechende Anfrage wurde bisher noch keine
Antwort erhalten (Siehe Protokolle). Aus diesem Grund
liegt zum jetzigen Zeitpunkt noch keine Zeichnung für die Einpflege
in das übergeordnete CAD-Modell zur Verfügung. Dies verzögert
ebenfalls die Auswahl der dazugehörigen Energiespeicherzelle. Auf der Website von SEW wurde jedoch eine
Ausgangsspannung von 360 Volt (1500 Watt) für die TDM- Serie
genannt. Die würde deine andere Auslegung des DC/DC-Wandlers zur
Folge haben.
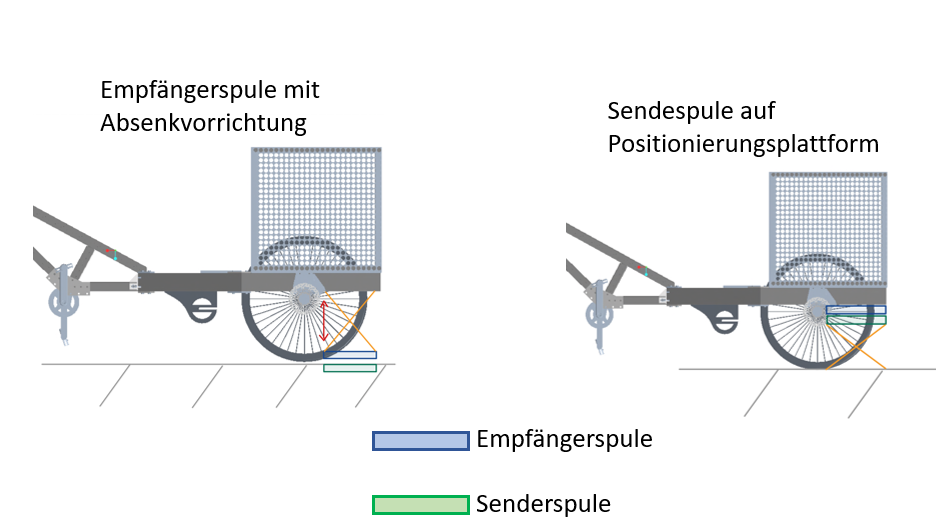
Konstruktion der Befestigung:
Um einen korrekten und effizienten Ladevorgang
zu gewährleisten, muss die Positionierung von Sende- und
Empfängerspule aufeinander abgestimmt sein. Minimaler Abstand sowie
Winkelversatz bei perfekt mittiger Ausrichtung sind hierbei die zu
erstrebenden Parameter. Die Konstruktion für die Befestigung entstand
mithilfe der existierenden CAD Dateien der E-Rikscha. Hierfür
wurden die Bauteile von SEW digital nachgezeichnet und in die
bestehende Baugruppe eingefügt. Nach der Evaluierung von
Positionierung und Orientierung der Komponenten wurde die Aufhängung
dieser entwickelt. Hierbei wurden drei Möglichkeiten in Betracht
gezogen. Da die Ladeplatten nur wenig Abstand bevorzugen, muss der
Luftspalt dazwischen minimiert werden. Dies kann durch das Absenken
der Empfängerplatte, das Anheben der Senderplatte oder das starre
Positionieren zueinander geschehen. Folgende Abwägungen wurden hierbei getroffen: Das feste Anschrauben der Empfängerspule am
Unterboden der Rikscha umgeht die Gefahr einer schweren
Absenkmechanik und der damit einhergehend Gefahr des Verklemmens
durch Verschmutzungen oder Rost. Das feste Anschrauben der Sendespule auf eine
abgemessene Positionierungsplattform verringert ebenfalls die Gefahr
des Verklemmens durch Schmutz und Rost. Außerdem kann hierdurch die
Erdung der Rikscha während des Ladeprozesses sichergestellt werden.
Dies geschieht mit einem Federstahl, welcher zu einem Schleifkontakt
gebogen wird und die Erdung des Rahmens, welche durch die
isolierenden Gummireifen nicht sichergestellt werden kann,
herstellt.
Beider der Lösungsvariante mit fixierter
Empfängerspule und der Sendespule auf eine Positionierungsplattform
ist darauf zu achten, dass eine geringe Einstellmöglichkeit der Höhe
realisiert werden kann. Sollte der Untergrund nicht exakt eben sein,
könnte sonst der Abstand der beiden Spulen zueinander zu groß oder nicht vorhanden sein. Bei einem schwungvollen
Anfahren der Ladeposition könnten diese so beschädigt werden.
Außerdem sollte die Ladestation immer so eingestellt sein, dass bei
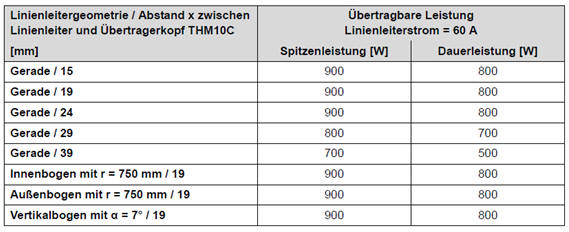
einem platten Reifen keine Kollisionsgefahr besteht. Dabei ist zu beachten, dass die übertragbare
Leistung mit zunehmendem Abstand geringer wird. Da die Leistungen
für unsere Verbraucher jedoch mehr als ausreichend sind, sollte dies
kein Problem darstellen.
Auswahl der elektrischen KomponentenUm die hohe Spannung des
Anpass-Steller-Ausgangs auf eine nutzbare Spannung zu reduzieren,
muss ein Gleichspannungswandler verwendet werden. Hierfür wurde
evaluiert, welcher Spannungswert für den Laderegler von größtem
Nutzen ist. Ebenfalls muss die maximal benötigte Leistung
ausgerechnet werden. Da die Rikscha einen großen Primärakku verfügt,
welcher ausschließlich den Motor betreibt und zusätzlich über einen
kleineren Akku (im folgenden Sekundärakku), welcher alle anderen
elektrischen Komponenten versorgt, müssen zwei Laderegler
verwendetet werden. Die benötigte Leistung errechnet sich hierbei
aus der Summe der beiden Einzelleistungen. Der Ausgang des
Primärakkuladegerätes liefert maximal 168 Watt. Dies errechnet sich
aus der maximalen Ladespannung von 42 Volt bei einem Strom von 4
Ampere. Außerdem wird der Wirkungsgrad des Ladecontrollers mit >80%
angegeben. Dies bedeutet die maximale Eingangsleistung von
sollte abrufbar sein.
Da der Akkuhersteller leider keine Antwort sendete und die
Zulieferfirma, welche Motor, Batterie und Ladegerät lieferte, keine
Ladegeräte mit DC-Eingang vertreibt, konnte nur wenig Informationen
zu einem möglichen alternativen Ladegerät gewonnen werden. Um die
Problematik eine funktionsfähige Rikscha mit den bestehenden
Komponenten zu realisieren, lässt sich jedoch durch den Einbau eines
DC/AC-Wandlers umgehen, welcher bei 24VDC Eingangsspannung 230VAC
(50Hertz) Ausgangsspannung zur Verfügung stellt. Dieser ist als
Erweiterung für Fahrzeugen einfach zu erwerben. Jedoch ist hierbei
entscheidend, den jeweiligen Wirkungsgrad zu beachten. Der in
Stückliste
ausgewählte Wandler wird mit n=82% angegeben. Dies erweitert
die oben kalkulierte Leistung:
Der Laderegler des kleineren Akkus liefert
zusätzliche 50 Watt an seinem Ladeausgang. Leider konnte hierfür
kein Wirkungsgrad ermittelt werden, jedoch wurde für vergleichbare
Ladegeräte pessimistische Werte ab 60% entdeckt. So wurde die
Leistung für dieses Ladegerät wie folgt berechnet:
Aus den beiden Einzelleistungen wurde so die
maximale Gesamtleistung von 333 Watt berechnet. Da
der DC/DC-Wandler von Siemens eine maximale Leistung von 480 Watt
liefern kann, sollte das kein Problem darstellen.
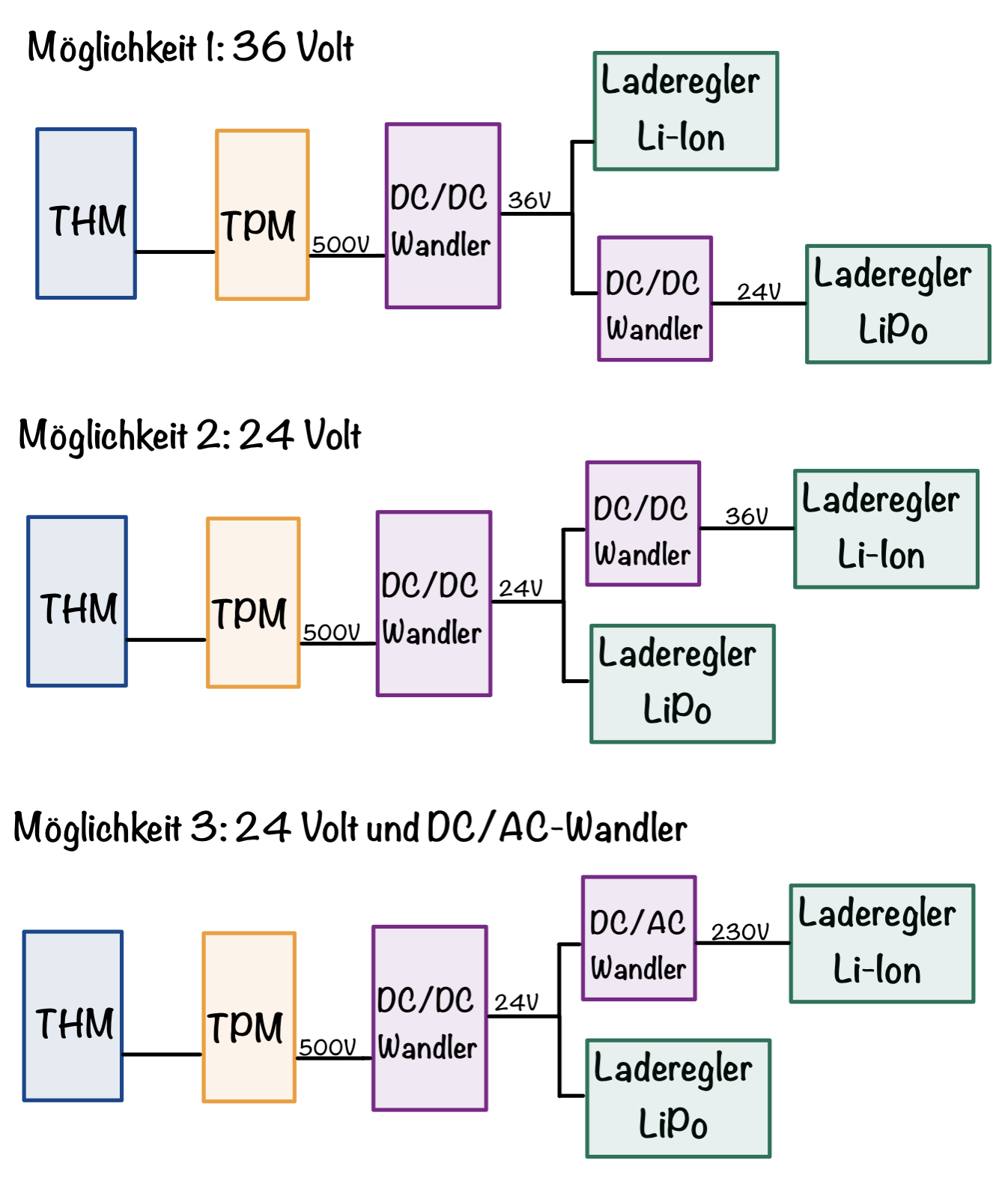
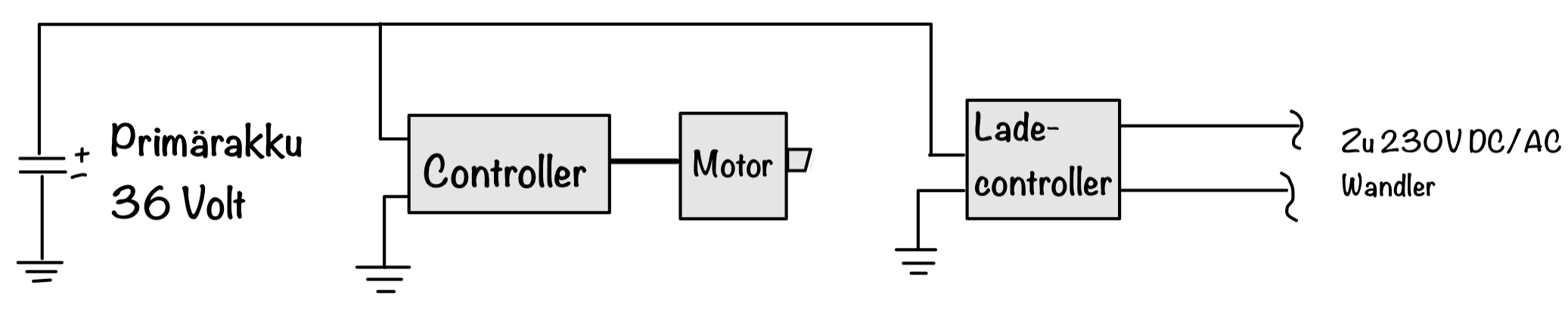
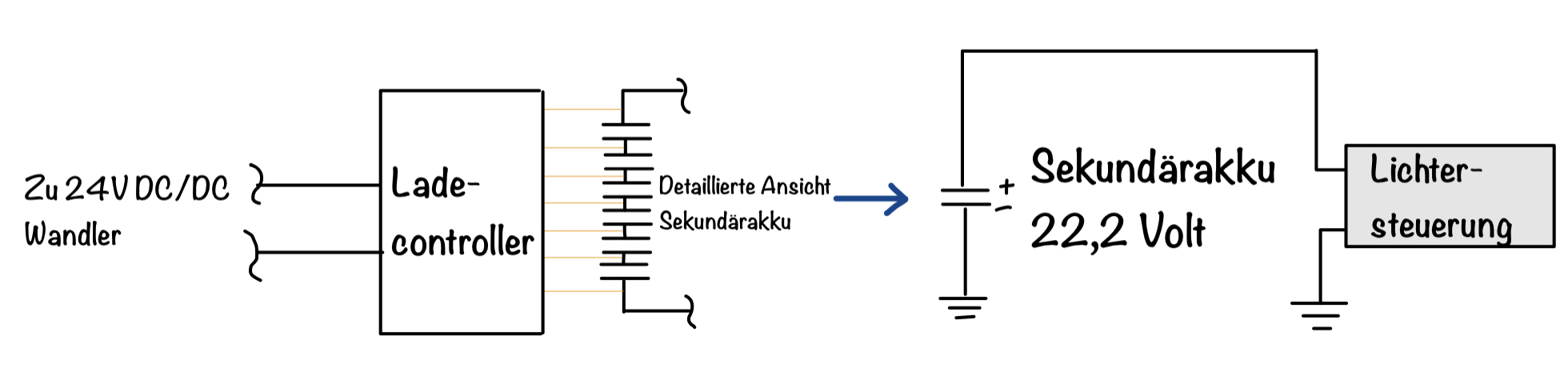
Abbildung: mögliche Komponentenketten
Da der Primärakku eine Spannung von 36 Volt und
der Sekundärakku eine Spannung von 22,2 Volt hat, sollte optimalerweise der Output des DC-Wandlers 36 oder 24 Volt Spannung
führen. Leider sind Ausgangsspannungen zwischen 24 und
48 Volt bisher sehr selten. Nur langsam nimmt die Verfügbarkeit von
Wandler, welche in diesem Spannungsspektrum arbeiten, zu. Diese
Tendenz ist dem Trend nach erneuerbarer Energie für kleinere Objekte
wie Gartenhäuser per Fotovoltaikanlagen geschuldet. Um bei der Auswahl des DC-DC Wandlers
(Abbildung Lila) eine sinnvolle Entscheidung treffen zu können, war
die Betrachtung der nachfolgenden Komponenten nötig. So kann durch eine passende
Auslegung direkt die benötigte Spannung eines Ladecontrollers
erzeugt werden, was die Verwendung eines dritten DC/DC-Wandler
obsolet macht. Auch währen Controller von Vorteil, welche
bereits eine variable Eingangsspannung zulassen. Beispiel hierfür
ist der SMART CHARGER von iSDT, welcher mit Eingangsspannungen
zwischen 10 und 27 Volt arbeiten kann. Dies würde ermöglichen, einen
DC/DC-Wandler von Siemens zu nutzen, welcher bei 24 Volt 480 Watt
zur Verfügung stellen kann. (Möglichkeit 2) Schwieriger stellt sich jedoch die Auswahl
eines passenden Ladecontrollers und des damit verbundenen
DC/DC-Wandlers für den 36 Volt Akku heraus. Wie bereits beschrieben, konnte hierfür aufgrund der fehlenden
Informationen zum Ladeprozess des Akkus keine klare Aussage
getroffen werden. Dieses Problem, welches in Möglichkeit 3 unter
Verwendung eines DC/AC-Wandlers umgangen wurde, ist bisher die
bevorzugte Lösung. Sollten jedoch weitere Informationen zur
Funktionsweise des Akkus gefunden werden, wäre Methode zwei zu
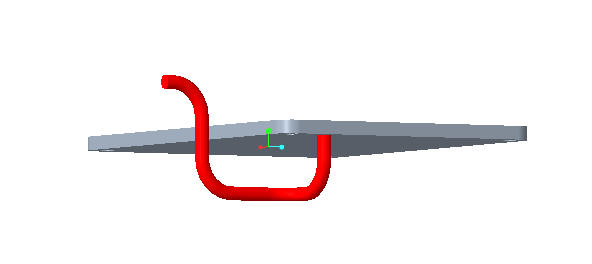
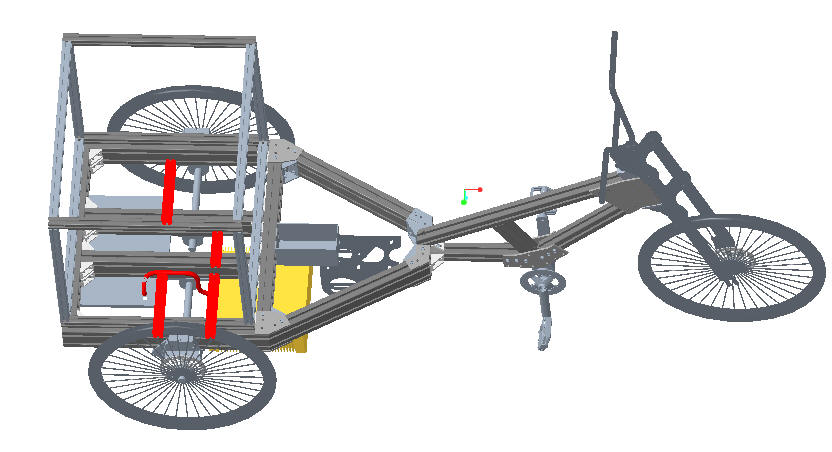
priorisieren. Auswahl der KabellängenUm die Kabellänge berechnen zu können, wurde an
der entsprechenden Stelle im CAD Modell ein grober Verlauf
dargestellt. Dabei wurde der Durchmesser von 16mm der Zeichnung
entnommen und entsprechend der Faustformel „Biegeradius = 2x
Durchmesser“ verlegt. Um dabei mögliche Reibstellen zu verhindern,
wurde das Kabel entlang den Aluminiumprofilen des Fahrzeugs verlegt.
Dies ermöglicht das spätere Befestigen und Sichern. Der Vorteil der
fest montierten Empfängerspule wird auch hier nochmal deutlich, da
durch eine Absenkeinrichtung das Kabel länger sein müsste. Ebenfalls
wäre es wechselnden Belastungen wie wiederkehrendem Knicken
ausgesetzt, was zusammen mit anhaltenden Witterungsbedingungen im
Freien die Lebensdauer des Kabels drastisch reduzieren würde.
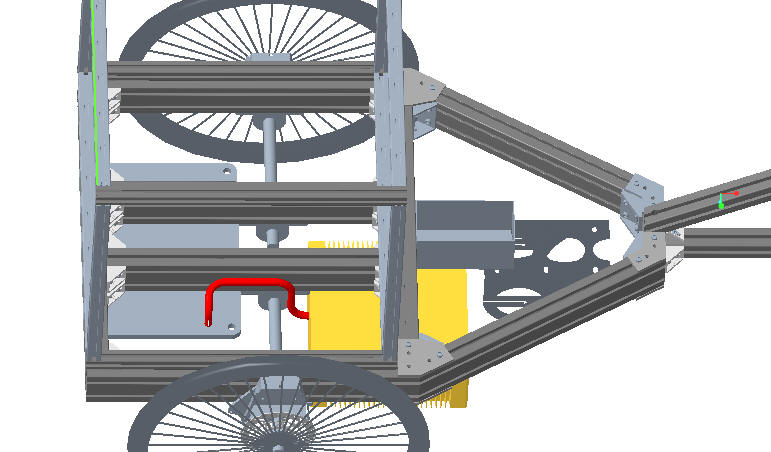
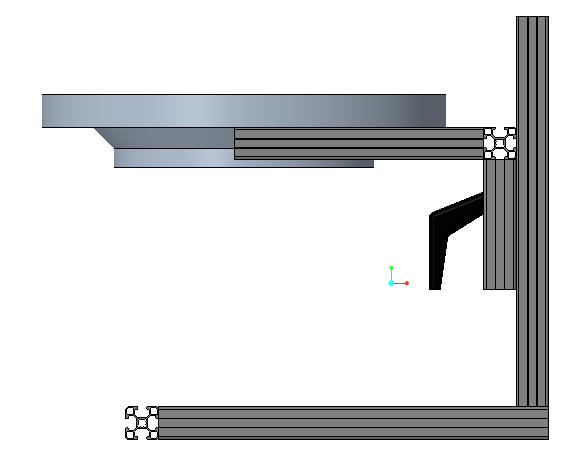
Abbildung: Montiertes Kabel an dem Aluminiumrahmen der Rikscha Dadurch errechnet sich die Gesamtkabellänge von
460mm. Diese Länge enthält aufgrund der
Vernachlässigung der Winkel-Rundungen auch bereits eine Sicherheit
und stellt das korrekte Verbinden von Übertragerkopf und
Anpass-Steller sicherstellt. Wie in der Abbildung zu sehen ist, benötigt die
Aufhängung von Übertragerkopf und Anpass-Steller noch weitere
Aluminiumprofile zur korrekten Aufhängung. Dafür werden insgesamt 4
weitere Querelemente inklusive deren Winkelstücke für die
Befestigung verbaut.
Auswahl und Bewertung des Kabeldurchmessers
Bei der Auswahl eines geeigneten
Kabelquerschnittes sind zwei Kenngrößen entscheidend. Zum einen die
Mindestfläche, um dem benötigten Strom stand zu halten und zum
anderen der Spannungsabfall von DC/DC-Wandler zu Ladecontroller. So ergibt sich folgende Rechnung:
Bei einer Stromstärke von 10 Ampere werden laut
DIN-Norm Kabel mit einem Querschnitt von 1,5mm2 benötigt,
sofern es sich um Kupfer als Adermaterial handelt. Bei einer maximalen Leitungslänge von einem
Meter ergibt sich daraus folgender Spannungsabfall:
Mit: R = Widerstand des Kabels
phi = spezifischer Widerstand L = Leitungslänge A =
Leitungsquerschnitt Bei einem maximalen Strom von ca. 10 Ampere
ergibt sich:
Dieser Spannungsabfall stellt für den
Laderegler des 22.2V-Akkus kein Problem dar, da dieser
Eingangsspannungen zwischen 10- und 24 Volt verarbeiten kann. Entwicklung der LadeverkabelungUm den Ladeprozess ohne das Umstecken von
Kabeln zu gewährleisten, empfiehlt sich die Einbindung in die
bisherige Verkabelung. Hierfür werden beide Stromkreise gesondert
betrachtet: |
| Mit Unterstützung von Prof. J. Walter | Wintersemester 2020 |