Der 3D Drucker soll abgebaut werden und in der Majolika
Kermanikmanifaktur wieder aufgebaut werden. Die einzelnen Teile
wurden beschriftet und sollen anhand dieser Kennzeichnung wieder in der gleichen Position aufgebaut werden.
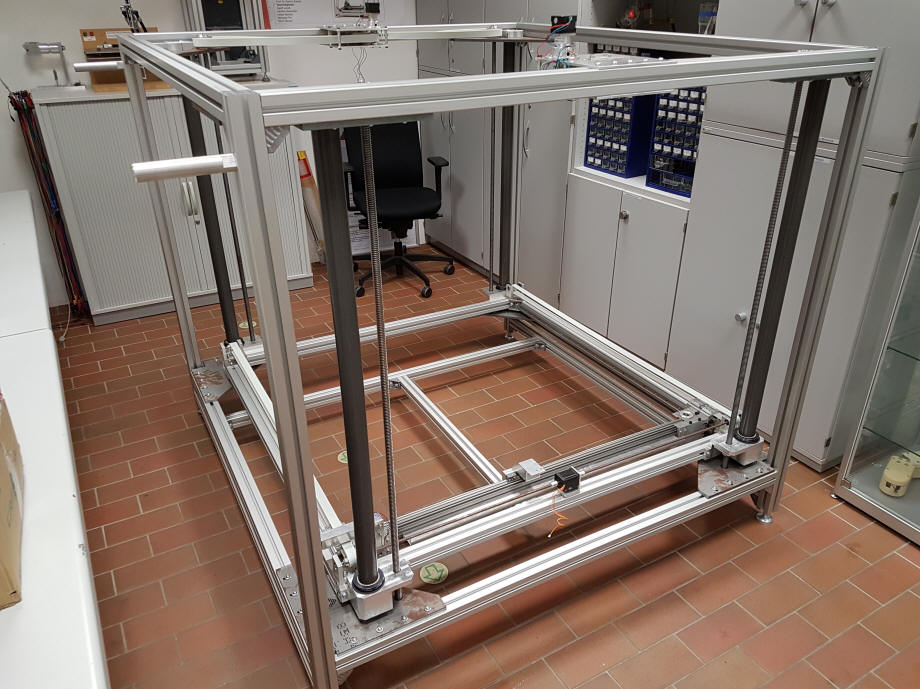
Die derzeit verbauten Schrittmotoren sind hier dargestellt und
wurden an der Universal CNC Box angeschlossen.

Um die X-, Y- und Z-
Positionierung im Raum zu bestimmen gibt es verschiedene
Möglichkeiten. Im folgenden haben wir 3 Konzepte ausgearbeitet, die
unserer Meinung nach am vielversprechensten sind.
Konzepte
1. IGUS Schrittmotor mit eingebautem Encoder
Eine Konzept beinhaltet einen Schrittmotor mit integrierten Encoder
und können jeweils in Voll- oder Halbschrittverfahren angesteuert
werden. Der ausgewählte Industrieschrittmotor
hat einen Schrittwinkel von 1,8° im Vollschrittverfahren und
benötigt 200 Schritte für eine volle Umdrehung. Im
Halbschrittverfahren hat er nur einen Drehwinkel von 0,9° und
benötigt somit 400 Schritte pro volle Umdrehung.
Ein Encoder,
oder auch Drehgeber, ist ein Sensor der den Drehwinkel misst. Über
eine Motorsteuerung und Mikrocontroller kann somit der Drehwinkel in
eine gedrehte Strecke der Zahnriemen umgerechnet werden. Anhand
dieser Ergebnissen kann am Ende dann die Position des Extruders
genau bestimmt werden.
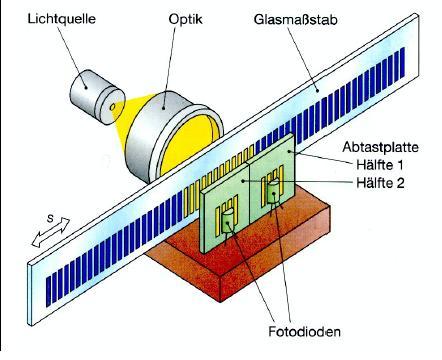
2. Glasmaßstab
Ein Glasmaßstab ist ein sehr
fein geteiltes Lineal aus geschliffenem Glas. Der Vorteil ist die
geringe Wärmeausdehnung und die hohe Messgenauigkeit. Mit einem
optischen Messgerät kann eine Messgenauigkeit von 10µm erreicht
werden. Durch das Befestigen eines Glasmaßstab an die X- und
Y- Achse ist es möglich die Position des Extruders zu bestimmen und
daraus resultiert eine dauerhaft hohe Genauigkeit während des
Druckvorganges.

3. Balluff - magnetcodiertes Weglängenmesssystem BML
Das BML ist ein magnetkodiertes, berührungsloses, inkrementelles
Wegmesssystem, bestehend aus einem Sensorkopf und einem Maßkörper.
Zur Positionierung werden Sensorkopf und Maßkörper an der Maschine
montiert. Auf dem Maßkörper befinden sich abwechselnd magnetische
Nord- und Südpole. Der Inkrementalsensor im Sensorkopf misst das
magnetische Wechselfeld. Beim berührungslosen Überfahren des
Maßkörpers tastet der Sensor im Sensorkopf die magnetischen Perioden
ab und die Steuerung kann so den zurückgelegten Weg ermitteln.
Für unser Modell ist die Konzeptüberlegung, dass das Magnetband als
Maßkörper direkt auf die Riemen geklebt werden und
der Sensor sich auf der Halterplatte beim Motor
befindet. Gemessen wird somit jede Bewegung des Motors und die
einhergehende Riemenbewegung.


|