Ab- und Aufbau 3D Drucker
Zuerst musste das vorhandene Gerüst des großen 3D Druckers abgebaut
werden.
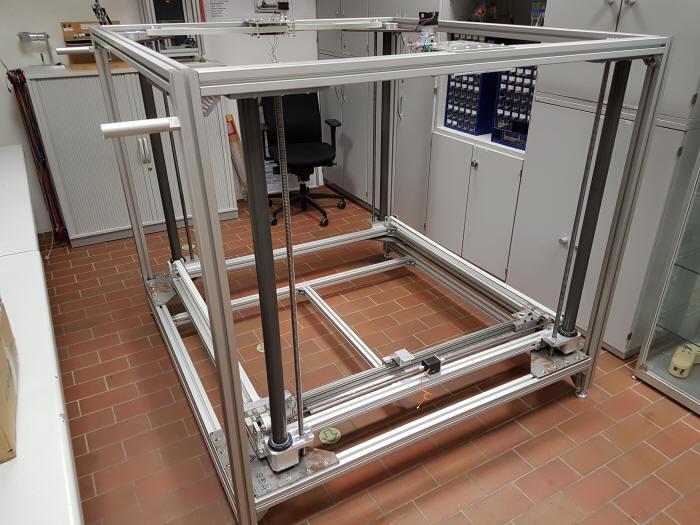
Abb.1: 3D-Drucker Hochschule
Da keine Pläne zur verfügung standen, wurden die
Aluminiumprofile, Achsen und Riemen gegen den Uhrzeigersinn
nummeriert. Die Nummerierung diente dazu, den Aufbau reibungslos
ablaufen zu lassen und damit beim Aufbau jedes Bauteil wieder an der
richtigen Stelle montiert wird. Nach der Nummerierung der Bauteile
begann der Abbau.
Hierfür wurde folgendes Werkzeug benötigt:
Gabelschlüssel, Inbusschlüssel und eine Ratsche. Probleme bei der
Zerlegung des Druckers gab es dabei nur an vier Schrauben, da an
diesen die Innensechskant der Schraubenköpfe abgenutzt waren. Mit
Hilfe eines Körner und Hammer konnte abhilfe geschaffen werden. Das
Prinzip ist einfach, man schlägt als erstes mit dem Körner eine
Delle in den Schraubenkof und setzt dann den Körner schräg in der
Delle an. Durch wiederholte Hammerschläge zwingt man somit die
Schraube zu einer Drehbewegung.
Der Abbau erfolgte an einem Tag.
Die Einzelteile wurden von Fabian aus der Majolika mit einem
Transporter abgeholt und in den Fertigungsraum der Majolika gelegt.
 
Abb.2 &3: Fertigungsrraum Majolika
Wir sortierten die Einzelteile und fingen an das Gerüst wieder
zusammenzuschrauben. Zuerst die unteren Aluminiumprofile.
Dann dieseitlichen in Z-Richtung.

Abb.4: 3D-Drucker Aufbau
Als diese montiert waren, konnten
die oberen Aluminumprofile angeschraubt werden. Nachdem die Achsen
für die Z-Richtung montiert wurde, kam zum Schluss die
Aluminumprofile für die X- und Y-Bewegung der späteren Düsen und
Extruder dran. Dieser Schritt war der schwierigste, da die
Aluminiumprofile außenrum kaum Spielraum für die Montage ließen.

Abb.5: 3D-Drucker Montage
Der
geringe Spielraum ist auf innere Spannungen des Gerüsts
zurückzuführen. Des weiteren waren ein paar Aluminiumprofile
verformt, die das gleichmäßige Ausrichten der Konstruktion, damit
die Abstände überall minimal sind, sehr erschwerte. Da für die
Bewegung in Z-Richtung neue und leistungsstärkere Schrittmotoren
verbaut werden sollen, wurden die Halteplatten und Motoren sowie die
dazugehörigen Riemen nicht wieder montiert. Vor der
Inbetriebnahme muss das Gestell für die X-Y-Ebene neu ausgerichtet
werden, damit diese Ebene auf jeden Fall waagrecht ist.

Abb.6: 3D-Druckraum Majolika
3D Modell Halteplatte Motor
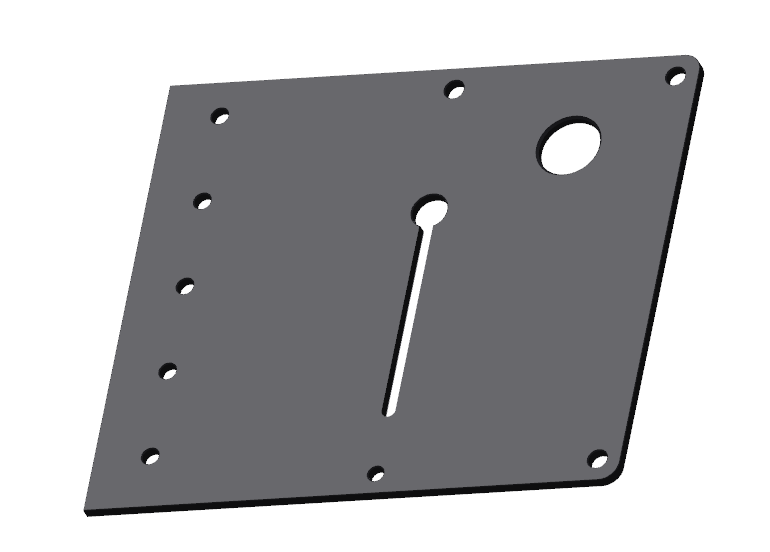
Abb.7: CAD-Modell Halteplatte Motor
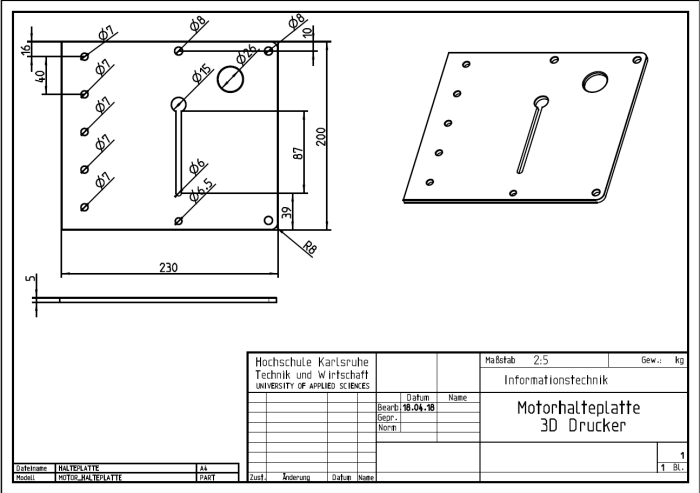
Abb.7: Zeichnung Halteplatte Motor
Download
CAD-Modell Halteplatte Motor
Download Zeichnung
Halteplatte Motor
|