Ein weiteres Problem am aktuellen eMalRob-FG war eine konstruktiv falsch ausgelegte Achse von Schrittmotor zum Rad.
Diesem Problem wurde durch eine konstruktive Verbesserung nachgeholfen.
Die CAD- & STL-Datei der neuen Achse befinden sich zum Download im Anhang.
Problem: Die Achse des bisherigen Roboters, welche
die Verbindung zw. Rad und Schrittmotor darstellt, hat eine
konstruktive Schwäche:
Das 3D-gedruckte Teil wurde durch relativ
hohe Kerbwirkungen so belastet, dass diese Achse öfters an der
selben Stelle auseinanderbrach.
Deshalb sollte die Achse konstruktiv
so verbessert werden, damit die Kräfte der Schrittmotoren kompensiert
werden können und somit diese Schwachstelle verschwindet.
Lösung: Um die konstruktive Basis nicht allzu stark zu verändern, wurde
versucht das "Grundgerüst" (bzw. das Aussehen) beizubehalten.
Lediglich der Absatz, an dem die
Kerbwirkungen auftraten, wurde verändert.
Dabei wurde darauf geachtet, dass eine
intelligente Ausführung der Konstruktion angewendet wurde. So können
durch einfaches Ändern der Parameter innerhalb der CAD-Datei, die
Längen/Abstände/etc. angepasst werden. Die Grundmaße wurden nicht
verändert.
Die neue Achse wird mit dem im HIT-/Informationstechnik-Labor vorhandenen Ultimaker-Drucker als PLA-Kunststoff gedruckt und an den zukünftigen Robotern verbaut.
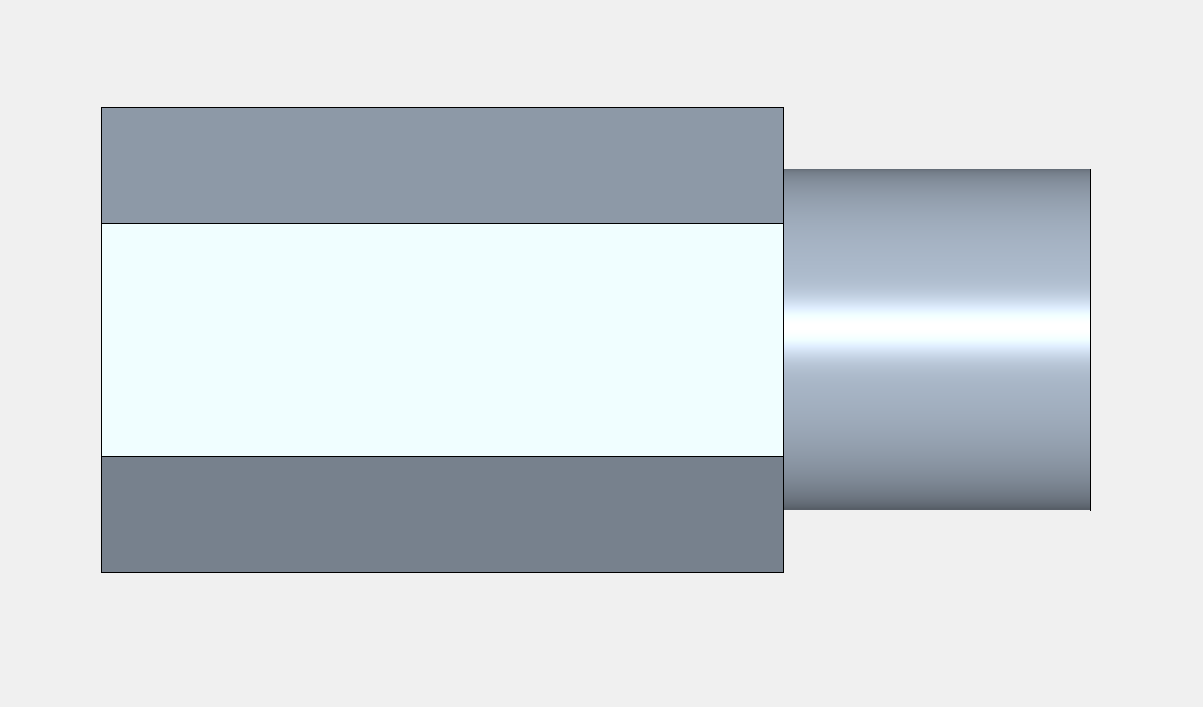
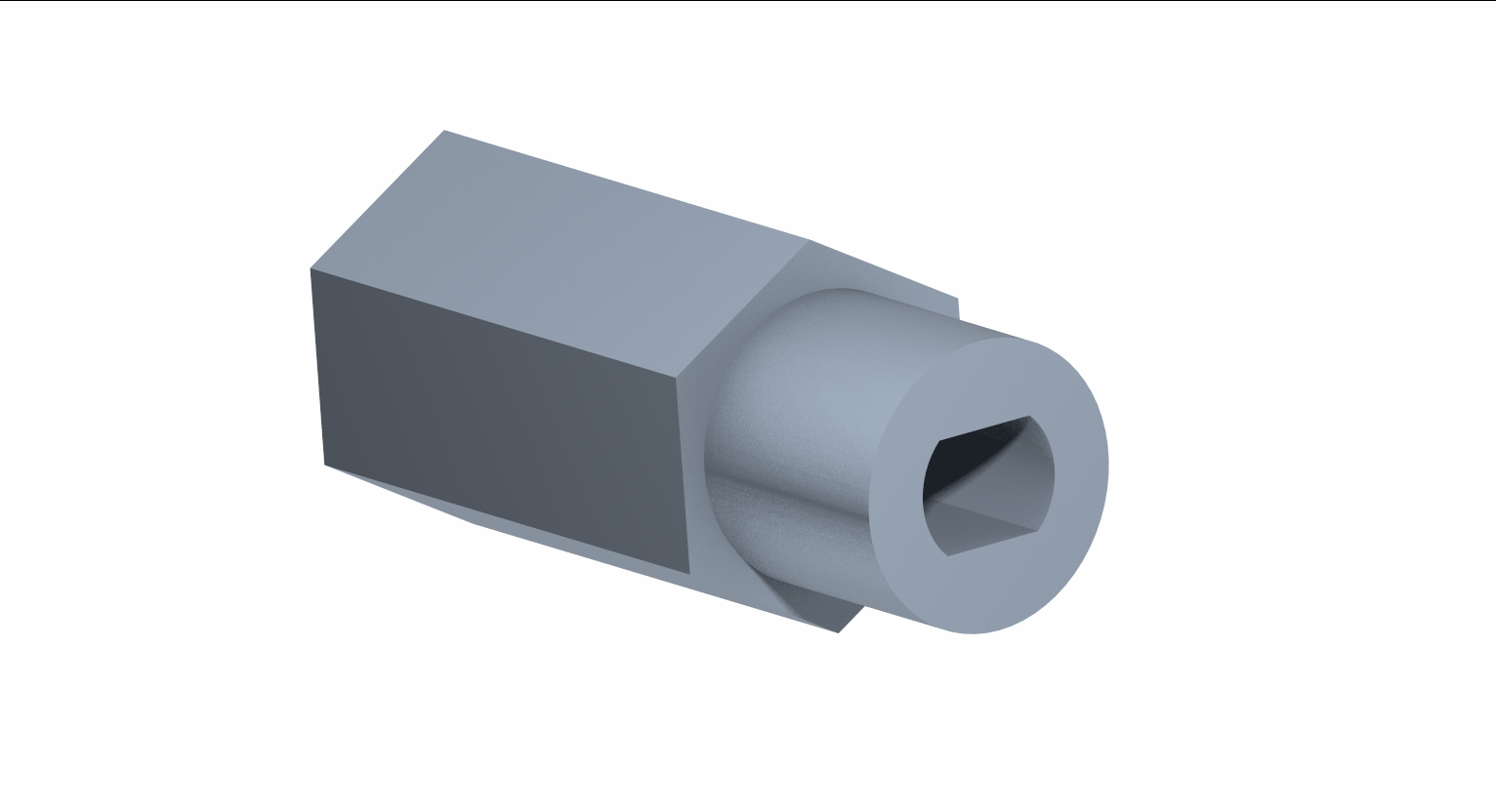
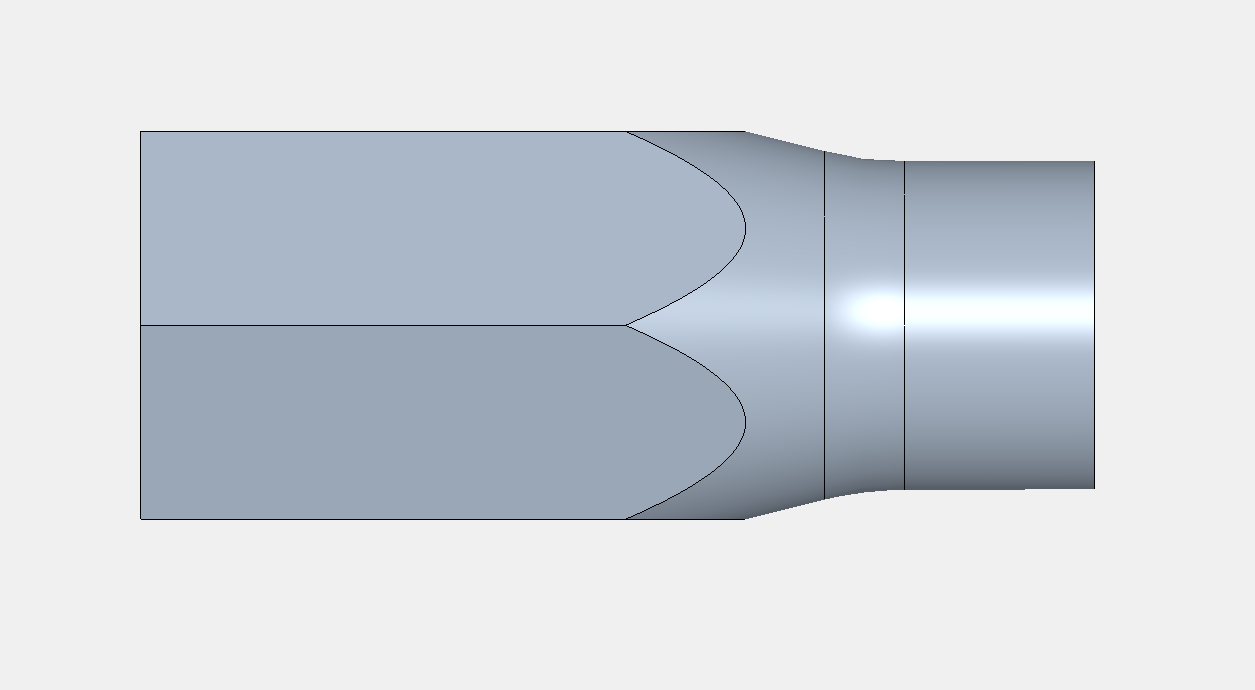
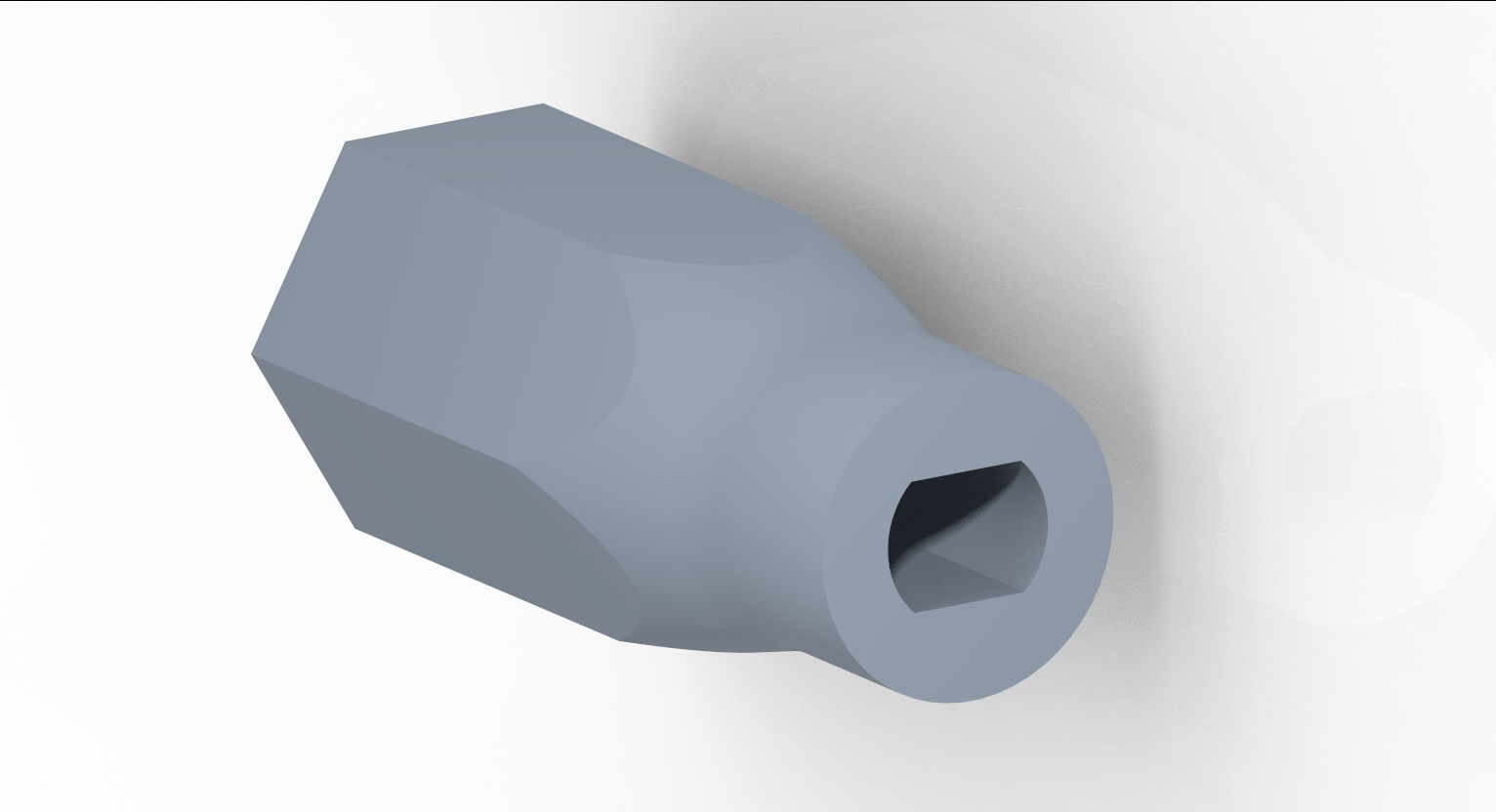
Die folgenden Abbildungen zeigen die Achse vorher und nachher im Profil,
sowie im Rendering der CAD-Software PTC Creo ohne Maßangaben.
| Achse vorher: |
Achse nachher/bearbeitet: |
|
|
|