Zu Beginn haben wir die Platine des aktuellen eMalRob's vermessen um
die Grundplatte im CAD passend zu entwerfen. Hierbei war auf die
Postionierung der einzelnen Komponenten zu achten. Die Balken der
Grundplatte haben wir so konstruiert, damit die Schrittmotoren
zwischen diesen Platz finden.
Die Akkuhalterung haben wir so
konzipiert, dass dort die Treiberboards für die Schrittmotoren
angebracht werden. Um die Kabellänge so kurz wie möglich zu halten,
haben wir den Anschluss an den Akku auf die Seite verlegt.
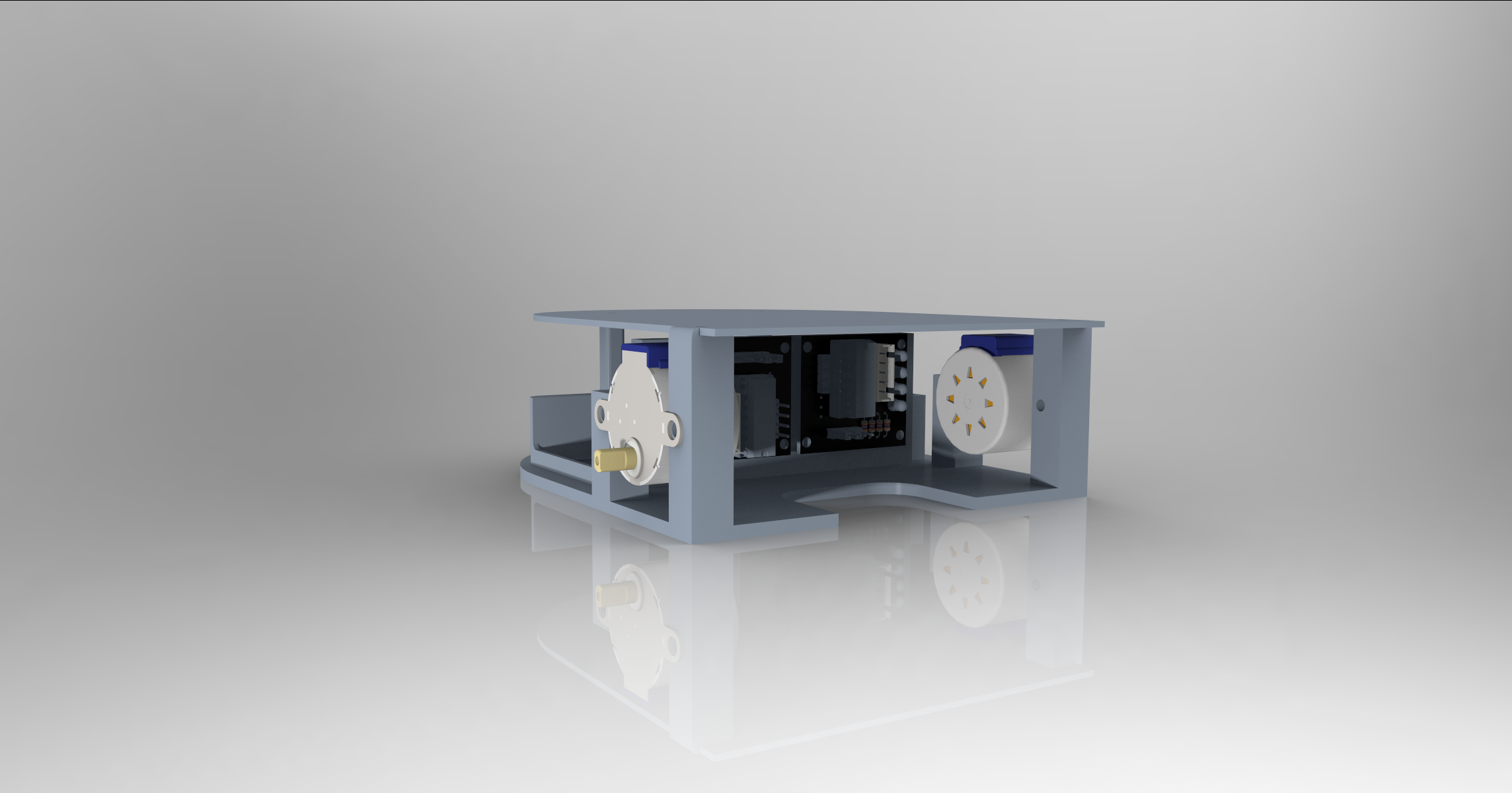
Hier zu sehen ist der Aufbau mit Grundplatte, Platine,
Schrittmotoren, Treiberboards sowie der Akkuhalterung.
Wir haben bereits die Motoren mit den Treiberboards an die Platine
angeschlossen um mithilfe eines Testprogramms
die Schrittmotoren
zu testen. Nun implementieren wir die Ansteuerung der neuen
Schrittmotoren in die Programmierung der Gruppe, die für die
Fernsteuerung zuständig ist.
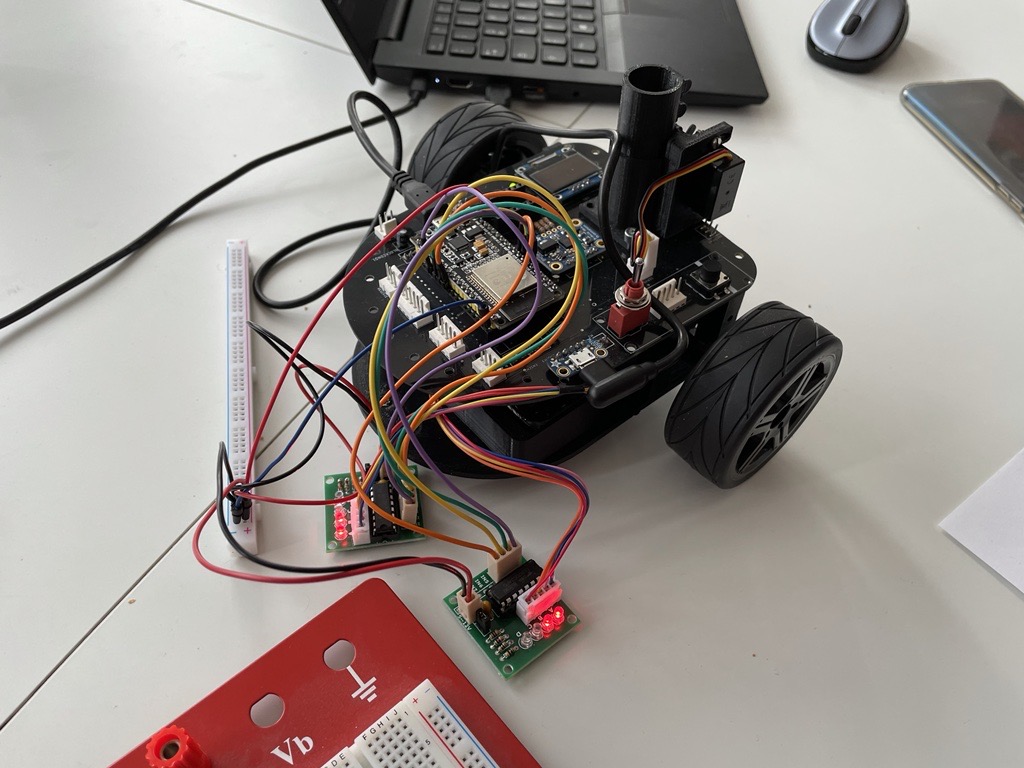
Hier zu sehen ist die Verkabelung der Schrittmotoren mit den
Treiberboards.
|