Um sicher zu gehen, dass die verwendeten Aktoren und Sensoren mit
den Datenblättern von ugfischer (https://content.ugfischer.com/cbfiles/fischer/Zulassungen/ft/)
übereinstimmen, wurden bei laufenden Testprogrammen die Ein- und
Ausgänge vermessen.
Messung der Motorausgänge (M1-M4)
Ausgangssignal bei verschiedenen Drehgeschwindigkeiten
| Geschwindigkeit (ROBOPro-Einstellung) |
Durschnittliche Spannung (V) |
| 1 |
1,98 |
| 2 |
2,92 |
| 3 |
3,85 |
| 4 |
4,58 |
| 5 |
5,62 |
| 6 |
6,15 |
| 7 |
6,98 |
| 8 |
8,02 |
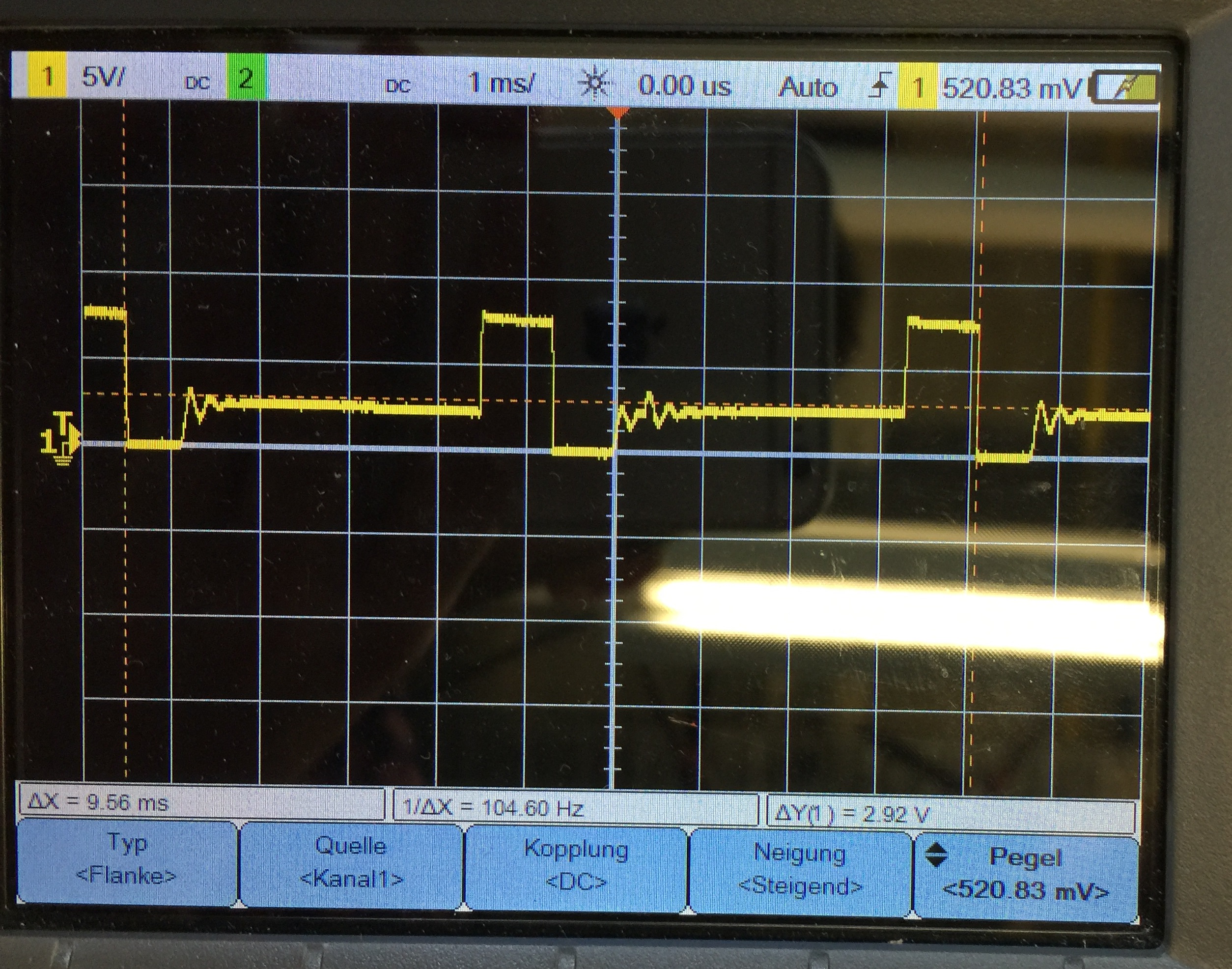
Das Signal der Ausgangsspanunnung läuft unabhängig der
Geschwindigkeit mit 100Hz. Trotz dem dass die Motoren mit dem obigen
Signal angesteuert werden, können diese mit einer reinen
DC-Spannung betrieben werden.
Die linken Buchsen sind dabei die
Spannungsversorgung, auf den rechten Buchsen liegen 0V.
Messung der Diodenausgänge (M1-M4)
| Helligkeit (ROBOPro-Einstellung) |
Durschnittliche Spannung (V) |
| 1 |
3,3 |
| 2 |
3,5 |
| 3 |
3,7 |
| 4 |
4,0 |
| 5 |
4,36 |
| 6 |
4,84 |
| 7 |
5,8 |
| 8 |
7,7 |
Die Ansteuerung der Leuchtdioden erfolgt vergleichbar mit den
Motoren
Messung der
Encoderausgänge der Motoren (C1-C4)
Ausgänge der
Motoren bei verschiedenen Drehgeschwindigkeiten
| Geschwindigkeit (ROBOPro-Einstellung) |
Frequenz des Rechtecksignals (Hz) |
| 1 |
33,3 |
| 2 |
55 |
| 3 |
78 |
| 4 |
100 |
| 5 |
120 |
| 6 |
140 |
| 7 |
160 |
| 8 |
180 |
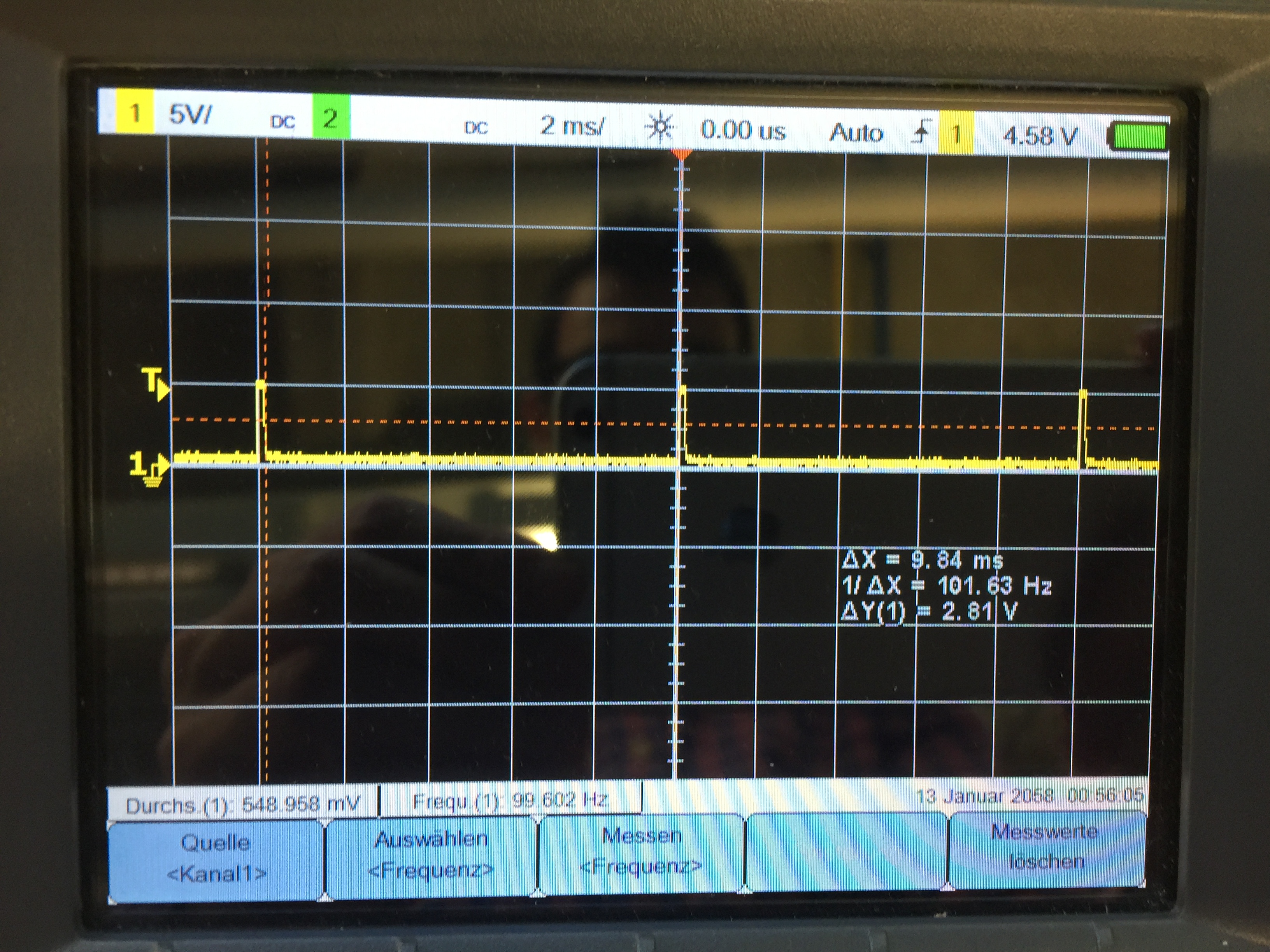
Bei dem Encodersignal handelt es sich um ein symmetrisches
Rechtecksignal. Umin = 0V, Umax = 5V
Messung der Digitaleingänge (I1-I8)
Taster (losgelassen und gedrückt) und Dioden (beleuchtet, unbeleuchtet)
Der Controller legt alle 10ms für 160µs 5V an der linken
Buchsenleiste an. Durch Drücken eines Schalters wird eine Buchse auf
Masse gelegt. Intern wird dann die vorhandene Spannung gemessen.
Professioneller Aufbau der Messung:
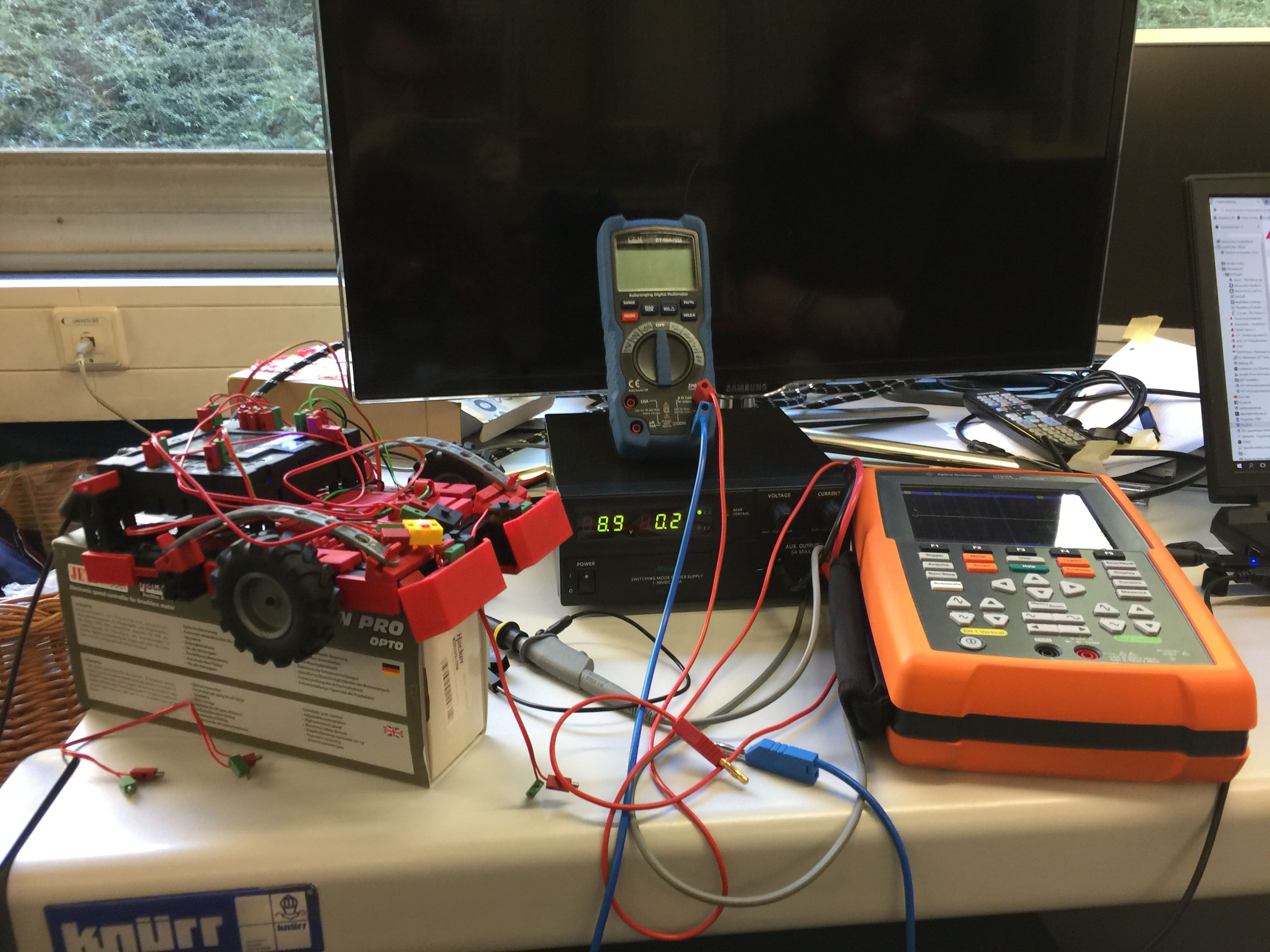
|