Umsetzung der Hardware
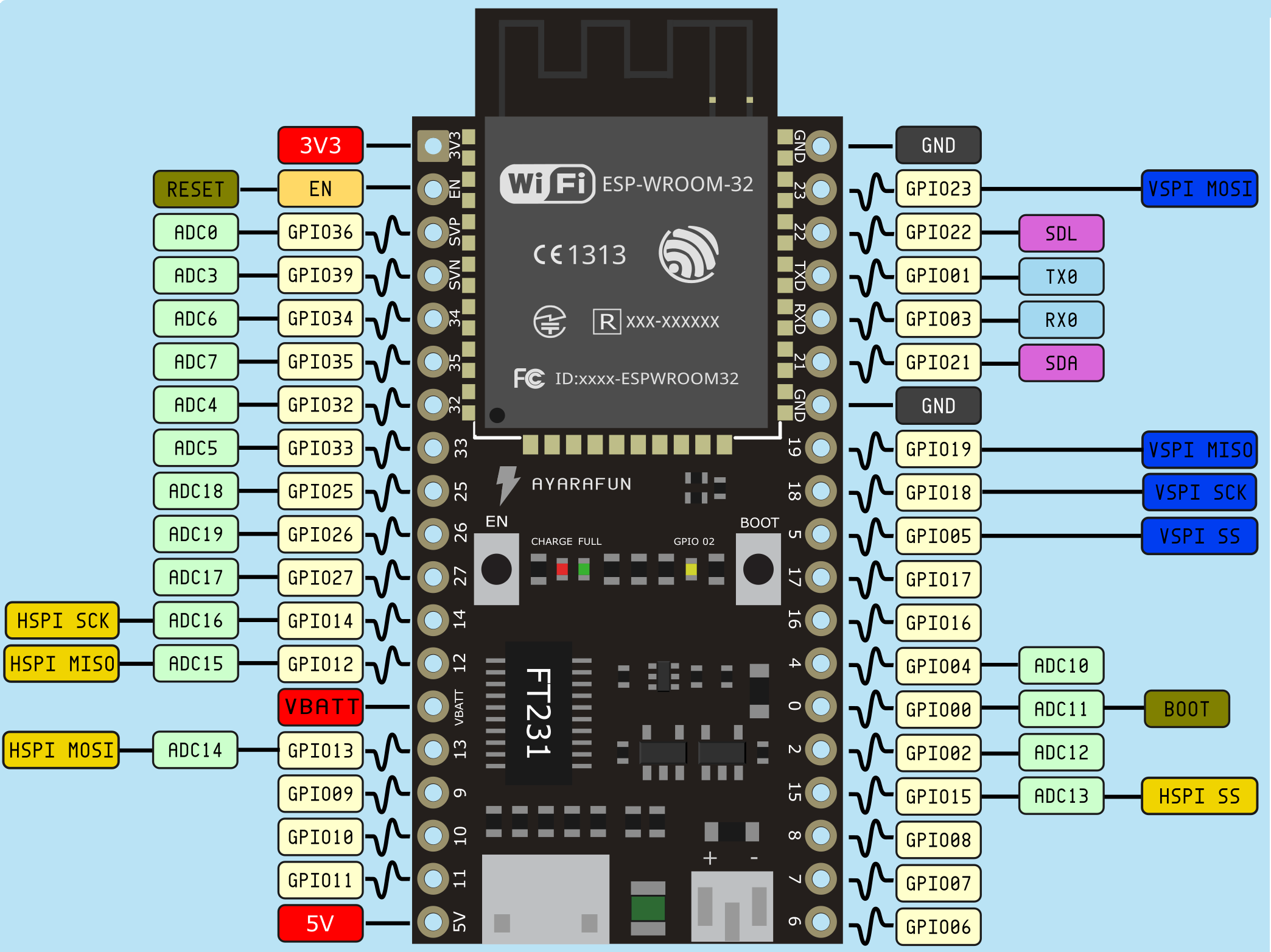
(Abb.8 - ESP32 Pinbelegung)
Als Anforderung wird der Mikrocontroller ESP32 eingesetzt. Der ESP32 wird mit 5V DC betrieben.
Für die Versorgungspannung wird der 9V Fischertechnik Plus Accu Pack (Abbildung 9) verwendet.
Da der ESP32 mit 5V versorgt werden muss, benötigt man ein Spannungswandler (Abbildung 10) der die 9V des Akkus auf die benötigten 5V transformiert.

(Abb.9 - Fischertechnik Accu Plus Pack)
|
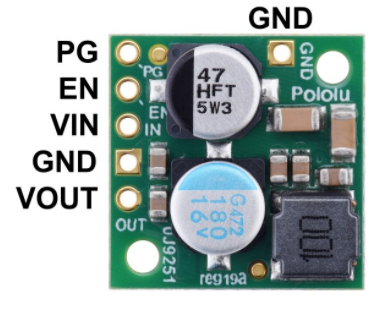
(Abb.10 - Spannungswandler 9V auf 5V) |
Um die 4 Aktoren anzusteueren werden zwei
duale Motortreiber eingesetzt. Diese werden mit der 9V
Versorgungsspanung angetrieben. Die Ansteuersignale werden vom ESP32
Mikrocontroller versendet.

(Abb. 11 - Duale Motortrebier)
Da der ESP32 Mikrocontroller nicht
ausreichend internen Speicher besitzt, wird zusetzlich ein SD -
Kartenslot integriert.
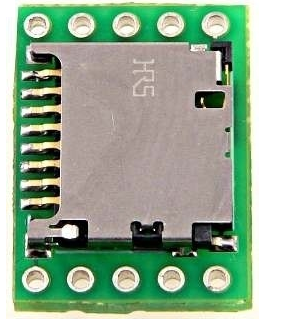
(Abb.12 - SD - Kartenslot)
Zwei Electrolykondensatoren werden vor die
Versorgungsspannung des Motortreibers benutzt.
Zusätztlich kommt eine Verpolschutztdiode an
die Akkuversorgung, damit bei verkehrt angeschlossener Batterie
keine Spannung auf der Schaltung anliegt. (insbesondere als Schutz
für die Electrolykondensatoren)
Für eine einfache Anzeige wird ein OLED
Display über I2C verwendet. Dieser wird an die 3.3V Anschluss der
ESP32 angeschlossen.
Um alle Fischertechnik Aktoren / Sensoren
anzusteueren, werden hierfür Miniatur Laborbuchsen ausgewählt.

(Abb. 13 - Miniatur Laborbuchsen)
|