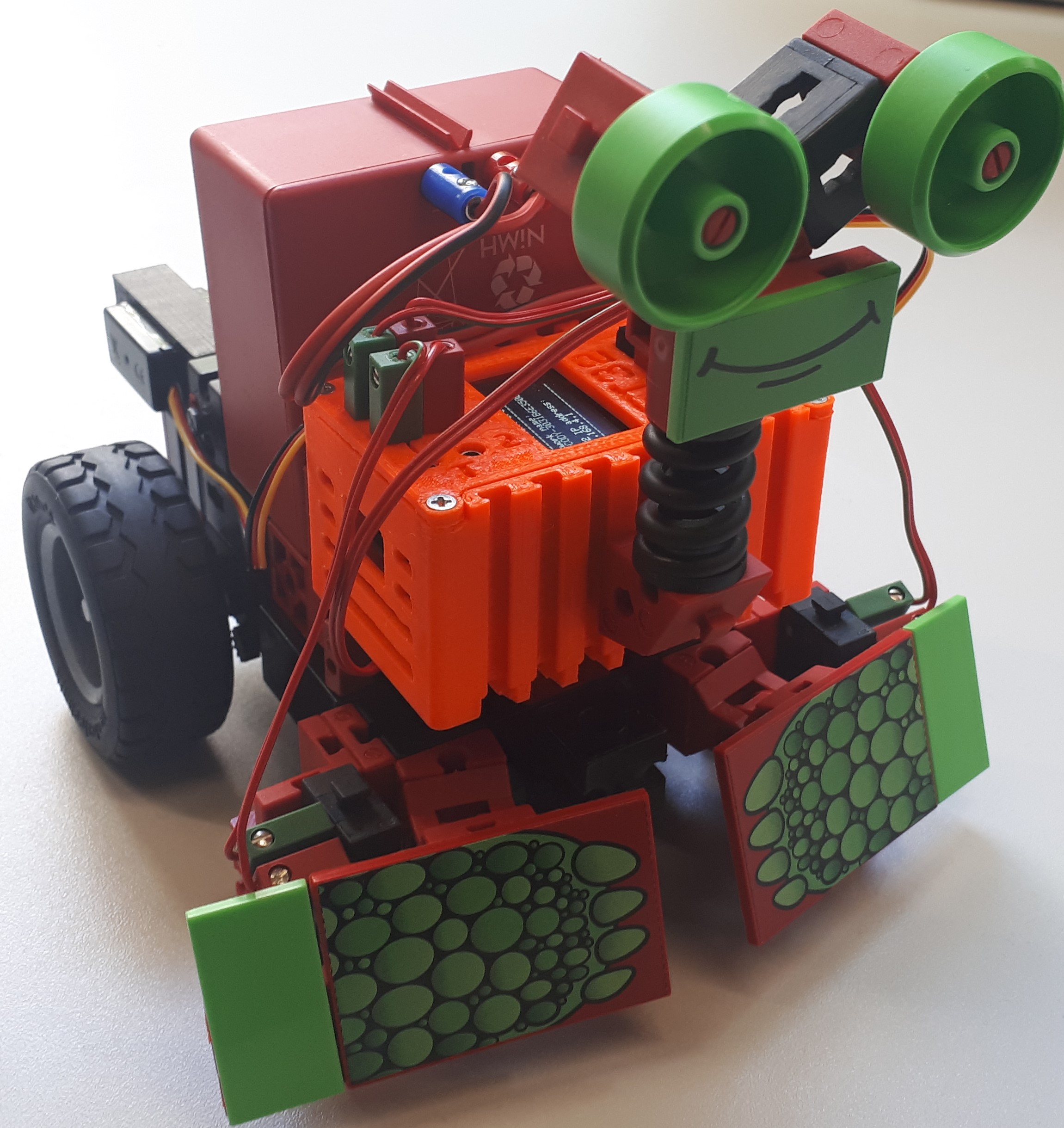
Bisher wird der oben gezeigte MalRob aus fischertechnikkomponenten
genutzt.
Die Kommunikation zum PC erfolgt dabei über ein eigenes
WLAN-Netz.
Mithilfe der Software Cody++ kann der Roboter
programmiert werden. Dabei wird ein eigener Code erzeugt welcher auf
dem MalRob ausgeführt wird.
Grundlage für den neuen MalRobFG
bildet ein ESP32 mit folgenden Kenndaten:
- ESP-WROOM-32 Prozessor
- Dual-Core Xtensa 32-bit LX6 MCU
- Micro USB-Anschluss
- 44 kB ROM
- 520 kB SRAM
32 digitale
I/O Pins
- UART, I²C, SPI, WLAN, CP2102 USB Schnitstelle
-
A/D- und D/A-Wandler
- Hall Sensor
|