Nach erstmaliger Funktionsprüfung des 3D-Druckers zeigte sich das ein Verfahren der x-Achse
und z-Achse nur in einem begrenzten Bereich fehlerfrei möglich war.
Lediglich die y-Achse ließ sich über den kompletten Fahrbereich frei
bewegen.
Die ersten Überlegungen bezogen sich auf das
Ausrichten des mechanischen Aufbaus und der z-Rundführungen. Nach
ersten Messungen zeigte sich, dass zwei der Rundführungen
nicht korrekt ausgerichtet waren.

Abb.: z-Achse Rundführung nicht in Lage
Das Ausrichten der
Rundführungen gestaltete sich etwas schwer, da diese sehr massiv
sind, weshalb ein größerer Kraftaufwand nötig war. Nach mehrmaligen
Versuchen gelang es, die Führungen so auszurichten, dass der
volle Verfahrbereich erreicht werden konnte.

Abb:. z-Achse Rundführung in Lage
Auch beim Rahmen der
Verfahreinheit zeigte sich nach Messungen, dass
eine gewisse Ungenauigkeit besteht. Der Rahmen konnte sich jedoch
durch das Lösen weniger Halteschrauben leicht
ausrichten lassen.
Der zweite Punkt unseres Konzepts
beinhaltete das Prüfen der elektronischen Ansteuerung der Motoren.
Hierbei ist aufgefallen, dass bei längerem Betrieb die beiden Motoren,
die die z-Spindeln antreiben, sehr heiß werden. Daraufhin wurden die
Einstellungen des Motortreibers nochmals geprüft. Dabei hat sich
ergeben, dass der Motorstrom deutlich zu hoch gewählt
wurde.
Die korrekte Einstellung konnte mithilfe der Datenblätter
von Motor und Treiber ermittelt und angepasst werden.
Anschließende Dauertests zeigten,
dass die Temperatur nicht mehr nennenswert anstieg.
Der letzte
Punkt auf der Konzeptliste war die Überprüfung des Kraftflusses von
Motor bis zu der Spindel bzw. zu dem Stirnrad. Bereits in den ersten
Tests hat sich gezeigt, dass der Motor aufgrund konstruktioneller und
auch fertigungsbedingter Fehler seine Kraft nicht komplett
übertragen kann. Auch nachdem die Anlage ausgerichtet und die
elektronische Ansteuerung angepasst wurde, konnte immer noch keine
dauerhaft fehlerfreie Fahrt gewährleistet werden. Sowohl die x- als
auch die z-Achse haben immer wieder Probleme gehabt, die wir auf
einen nicht funktionierenden Kraftfluss zwischen Motor und Stirnrad
zurückführen konnten.
x-Achse
An der x-Achse wird ein
Motor verwendet, der eine durchgängige Antriebswelle besitzt, um so
an beiden Seiten synchron anzutreiben. Hier wurde bereits der
erste Fehler erkannt. Der Motor wird nur einseitig gelagert, sodass
Momente nicht beidseitig abgefangen werden können. Außerdem
werden mithilfe von Klauenkupplungen Aluminiumwellen angetrieben, die
beidseitig eine Unwucht aufweisen. Dies führte bei dauerhaftem
Betrieb immer wieder dazu, dass die Last am Motor zu groß wurde.
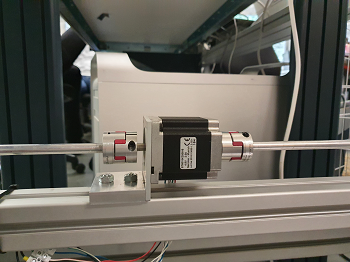
Abb.: Motor x-Achse
z-Achse
Die z-Achse besitzt zwei
Motoren, die
jeweils zwei Kugelumlaufspindeln über einen Riemen antreiben. Die
Schwächung im Kraftfluss wurde hauptsächlich auf einer Motorseite
festgestellt. Hierbei wurde die Zahnwelle, welche am Motor
angeflanscht ist, fehlerhaft gefertigt. Die Passung für die
Motorwelle wurde zu groß
gewählt, wodurch
beim Spannen eine starke Unwucht entstand. Außerdem waren die
Umlenkrollen so schlecht
gefertigt,
dass auch diese eine Unwucht aufwiesen. Des weiteren besitzt die
Rolle gegenüber dem Riemen
einen schlechten Reibungskoeffizient wodurch die Reibkräfte unnötig
hoch sind.
Zusätzlich
ist aufgefallen das das Konzept zum Spannen der Riemen mangelhaft
ist
und zudem Fertigungsfehler aufweist.

Abb.: Motor z-Achse
|