Konstruktion |
Dieses Kapitel befasst sich mit der Rahmenkonstruktion des Hexakopters. Dies umfasst die Entwicklung der Ausleger, die Konstruktion des Zentralpods sowie der Motorpods und die Auslegung des Landegestells.
Wie in Kapitel 2.2 beschrieben soll der Zentralpod achsensymmetrisch aufgebaut werden. Dies erleichtert die Orientierung und Steuerbarkeit. Dennoch sollen die Rotoren symmetrisch auf einer Kreisbahn angeordnet werden. Abbildung 10 zeigt die Anordnung der Ausleger.
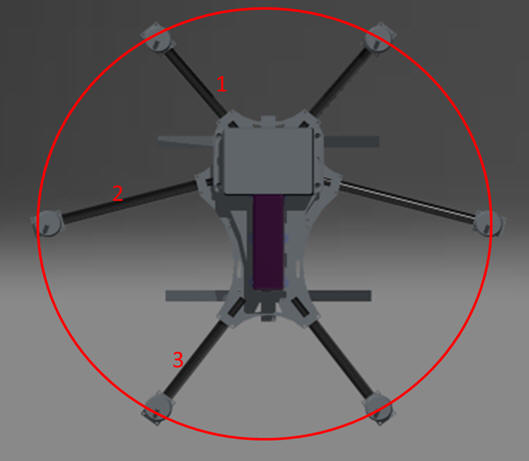
Abbildung 10: Anordung der Ausleger
Sowohl die vorderen (1), die mittleren (2) als auch die hinteren Ausleger (3) verbinden den jeweiligen Motorpod mit dem Zentralpod, sodass die Motorwelle auf der Kreisbahn liegt. Konstruktiv sind die Ausleger aus Carbonrohr mit einem Durchmesser von 16mm. Diese aus 3K Fasern mit 2/2 Köper Gewebe Bindung zeichnen sich durch eine sehr hohe Steifigkeit bei äußerst geringem Gewicht aus. Damit erfüllen sie die Anforderungen und die auftretenden Belastungen. Die Hauptbelastungen treten in vertikaler Richtung auf (Steigflug, Sinkflug Schwebeflug).
Der Zentralpod bildet das Zentrum sowie die Grundlage für den Anbau von Steuerung, Akku etc.. Außerdem werden an diesen die sechs Ausleger angebunden. Auch dieser muss die Hauptbelastungen aufnehmen, sodass besonderes Augenmerk auf die Biegesteifigkeit sowie auf die Aufnahmen der Ausleger gelegt wird.
In der Konzeptphase wurde zur Gewichtsersparnis festgelegt, dass die gesamte Konstruktion mittels Leichtbau zu realisieren ist. Der Zentralpod soll außerdem aus einer Sandwichkonstruktion aus Carbonplatten bestehen.

Abbildung 11: Konstruktion des Zentralpods
Abbildung 11 zeigt die Konstruktion des Zentralpods. Die Ausleger werden jeweils über zwei Rohrschellen aufgenommen. Diese sind aus Aluminium gefertigt. Gleichzeitig verbinden die insgesamt 24 Rohrschellen die obere Zentralplatte mit der unteren Zentralplatte. Durch diese Sandwichbauweise besitzt der Zentralpod eine äußerst hohe Steifigkeit. Zur Gewichtsersparnis befinden sich auf den Platten an wenig belasteten Stellen Aussparungen. Außerdem befinden sich am Zentralpod Bohrungen und Langlöcher für die Befestigung und Montage von:
·
Akkuplatte
·
Steuerung
·
Empfänger
·
GPS- Empfänger
·
Landegestell
·
Gimbal
·
Fallschirm
·
Reserveslots
Die Akkuplatte wird über acht Dämpfergummis (siehe Abbildung 11) auf der oberen Zentralplatte angebracht. Grund ist die schwingungstechnische Entkopplung von Steuerung bzw. dessen Sensorik vom Rest der Rahmenkonstruktion. Durch die speziell für das Gewicht ausgelegten Dämpfergummis werden die Vibrationen der Motoren gedämpft und somit die Sensorik nicht beeinflusst. Auf der Akkuplatte sind Befestigungsmöglichkeiten für den Akku und die Steuerung.
Die Außenläufermotoren sollen über Motorpods an den Auslegern befestigt werden. Die Konstruktion muss die Kräfte und Momente die durch den Motor erzeugt werden sicher aufnehmen können. Abbildung 12 zeigt die Konstruktion des Motorpods.
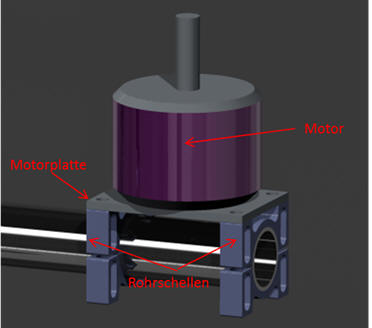
Abbildung 12: Konstruktion des Motorpods
Der Motor wird über die Montagebohrungen mit der Carbon Motorplatte verschraubt. Diese ist über zwei Rohrschellen mit dem jeweiligen Ausleger verbunden.
Der Hexakopter benötigt ein Landegestell damit er sicher und beschädigungsfrei landen kann. Dieses soll auch stoßartige Kräfte beim Landevorgang aufnehmen können und ggf. ausfedern. Um eine Beeinflussung der Flugeigenschaften zu verhindern sowie ein rundum uneingeschränktes Kamerabild zu ermöglichen soll das Landegestell elektrisch ausfahrbar sein. Das klappbare Landegestell ist auf Abbildung 13 dargestellt.
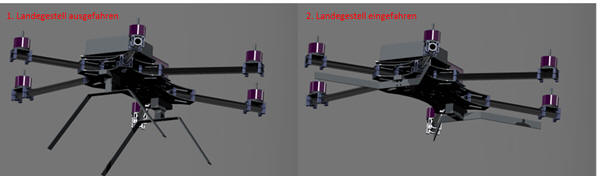
Abbildung 13: Ausfahrbares Landegestell
Über zwei Servos werden jeweils die Landegestellausleger ein- und ausgefahren. Im eingefahrenen Zustand (2) legen sich die Träger unterhalb der Ausleger an, sodass durch diese keine Strömungsverluste entstehen.
In Abbildung 14 ist der Servomotor mit CNC gefertigtem Servoadaptern und den damit befestigten Landegestellauslegern dargestellt.
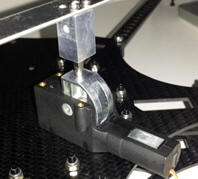
Abbildung 14: Landegestell Servomotor
|
|