2 Konzeptphase |
|
|
Im folgenden Kapitel wird die methodische Vorgehensweise bei der Konzeptfindung beschrieben. Ausgehend von der Betrachtung der bestehenden Vorgänger-Plattform wird diese auf Schwachstellen und Verbesserungspotentiale untersucht. Ausgehend davon wird anschließend ein neues technisch optimiertes Konzept erstellt und ausgelegt. 2.1 Vorgänger-PlattformAnhand der abgeleiteten Anforderungen erfolgt die Entwicklung eines groben Konzepts. Dazu wird zunächst Augenmerk auf die Vorgängerplattform gelegt:
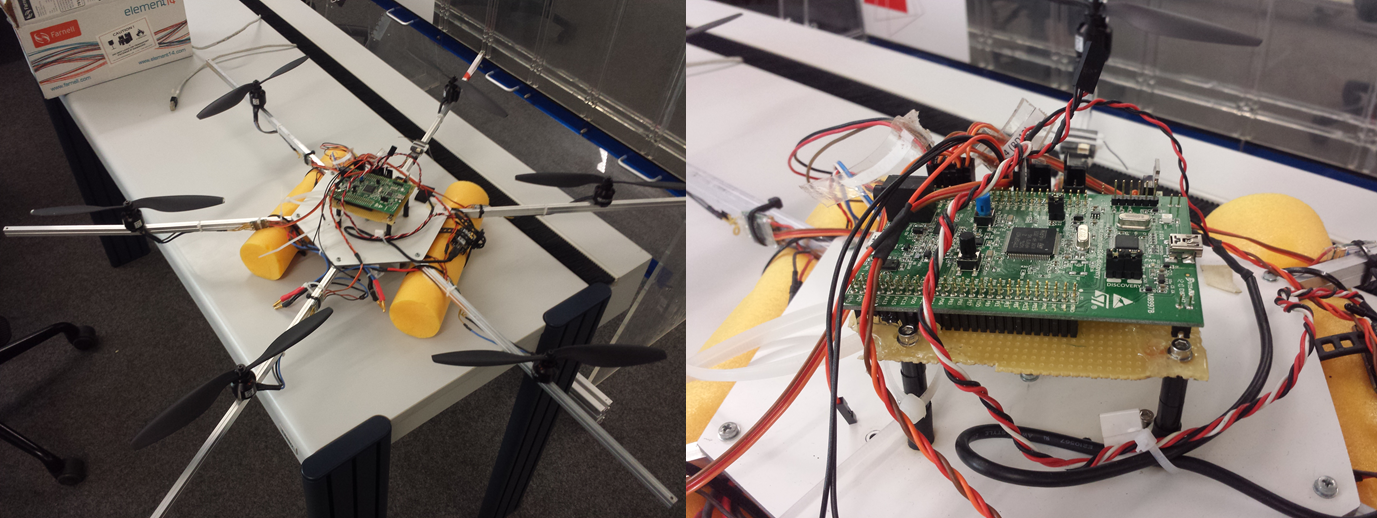
Abbildung 1: Hexakopter-Plattform Hochschule Karlsruhe Abbildung 1
zeigt die Vorgängerplattform. Der Zentralpod hat die Form eines Hexagons,
von dessen Mittelpunkt die sechs Ausleger symmetrisch angeordnet sind.
Diese bestehen aus Aluminium-Vierkantrohr. Die Motoren sind mit 10 Zoll
Rotoren bestückt. Außerdem ist zu erwähnen, dass die Ausleger aus
Sicherheitsgründen überstehen um Beschädigungen des Rotors vorzubeugen .
Der Gesamtdurchmesser der Plattform beträgt dadurch knapp einen Meter. Die
Elektronik ist provisorisch mittig auf dem Zentralpod befestigt. Die
Lipo-Akkus werden unterhalb des Pods angebracht. Das Gesamtgewicht beträgt
2,5 kg. Abschließend bleibt festzuhalten, dass es sich hierbei um eine sehr einfache, dafür jedoch solide Konstruktion handelt. Dennoch sind vielseitige Verbesserungspotentiale zu erkennen. Allein durch modernen Leichtbau und der Verwendung von immer leistungsfähiger werdenden Faserverbundmaterialien, ist eine deutliche Gewichtsersparnis möglich. Außerdem ist bei dieser Plattform eine geringe Steifigkeit feststellbar, wodurch Vibrationen auftreten, welche die Sensorik negativ beeinflusst. Hier kann beispielsweise eine Sandwichbauweise des Zentralpods sowie die Verwendung steifere Materialien anstelle von Aluminium Abhilfe verschaffen. Eine weitere große Schwachstelle liegt in der einseitigen Befestigung der Ausleger mittels einfacher M3 Schrauben. Des Weiteren bietet sich eine Entkopplung der Sensorik bspw. Über Dämpferelemente an. Auch die offene Verkabelung und unstrukturierte Elektronik zeigt großes Verbesserungspotential auf. Ausgehend von der aus der Plattform gewonnen Erkenntnisse folgt die Konzeptfindung der Neuentwicklung. 2.2 KonzipierungUm die technisch und wirtschaftlich optimale Variante zu finden, werden Hilfsmittel wie der Morphologischen Kasten sowie das Prinzip der technischen Wertigkeit verwendet. Für die Konzipierung wurden folgende Entscheidungskrieterien herangezogen:
1.
Gewicht: Aus der Struktur und dem Aufbau resultierende Gewicht
2.
Wirkungsgrad / Dynamik: Die Anordnung der Luftschrauben beeinflusst direkt
die Flugdynamik sowie den Wirkungsgrad. Koaxiale Luftschraubenanordnungen
besitzen durch Strömungsverluste einen geringeren Wirkungsgrad.
3.
Funktionalität: Die Form des Zentralpods beeinflusst maßgeblich eine
sinnvolle Anordnung alle Einzelkomponenten. Mit Hilfe eines Morphologischen Kastens (Tabelle 2‑1) soll die technisch und wirtschaftlich sinnvollste Variante gefunden werden.
Tabelle 2‑1: Morphologischer Kasten – Konzeptfindung
Tabelle 2‑2: Technische Wertigkeit - Konzeptfindung
Mit den Gewichtsfaktoren der jeweiligen Kriterien wird die bestgeeignetste Variante ausgewählt. Tabelle 2‑3: Bewertungstabelle - Raddrehzahlerfassung
Variante 2 erweist sich entsprechend dem Morphologischen Kasten als optimale Lösung. Das Konzept überzeugt durch eine hohe Funktionalität. Die länglich variable Form des Zentralpods eignet sich hervorragend als Montageplattform für den Lipo-Akku und aller weiteren Komponenten. Durch die konventionelle Motoranordnung wird ein stabiler Flugbetrieb bei gutem Wirkungsgrad gewährleistet. 2.3 KonzeptausarbeitungFür die ausgewählte Struktur wird im Folgenden eine detaillierte geometrische Form festgelegt. Darüber hinaus werden die Abmessungen und eine Gewichtsabschätzung vorgenommen. Der Zentralpod soll achsensymmetrisch aufgebaut werden. Dies erleichtert die Orientierung und Steuerbarkeit. Dennoch sollen die Rotoren symmetrisch auf einer Kreisbahn angeordnet werden. Dies ist auf Abbildung 2 zu erkennen.
Abbildung 2: Grundstruktur und Rotoranordnung Zur Gewichtsersparnis soll die gesamte Konstruktion mittels Leichtbau realisiert werden. Der Zentralpod soll aus einer Sandwichkonstruktion aus Carbonplatten bestehen. Die Ausleger sind als Carbonrohre geplant. Dies ermöglicht ein geringes Gewicht bei einer sehr hohen Steifigkeit. 2.4 GewichtsauslegungUm eine möglichste präzise Leistungsauslegung der Motoren durchzuführen wird zunächst das Gesamtgewicht aller Einzelkomponenten erfasst und zusammengerechnet. Die folgende Tabelle listet die zu erwartende Gewichtsabschätzung des Hexakopters auf: Tabelle 2‑4: Gewichtsabschätzung
Bei Bedarf muss zu dem Abfluggewicht von 2,2kg noch das Gimbal mit Kamera hinzugerechnet werden, so dass mit einem maximalen Abfluggewicht von 3kg zu rechnen ist.
|