Als ausgewählte Lösung
um die Wegstrecke messen zu können haben wir uns für das Konzept mit dem
IGUS
drylin Schrittmotor NEMA23XL (MOT-AN-S-060-035-060-M-C-AAAC)
entschieden. Da an den Spindeln für die Z-Richtung neue Motoren
verwendet werden sollen wäre es aus unserer Sicht sinnvoll gleich
neue Schrittmotoren mit Encoder zu verwenden. Kostentechnisch ist
dies um vieles günstiger, da mit diesem Konzept ein teures
Messsystem (Glasmaßstab, magnetcodiertes Wegstreckenmessgerät) nicht
mehr notwendig ist.
Erforderliches Drehmoment um
eine Gewindestange zu drehen und somit eine Bewegung in Z-Richtung
zu erzeugen:
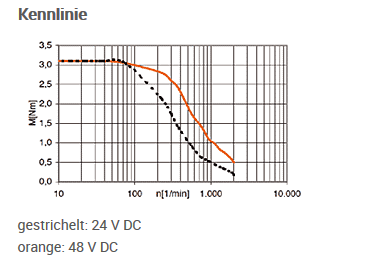
Anhand von diesen Berechnungen und einer eingeplanten
Sicherheit würde ein Schrittmotor
mit einem Drehmoment von 2 Nm reichen. Unsere Messungen wurden aber
ohne Extruder und Schlauch mit Ton durchgeführt, sodass während
unseren Messungen nicht das endgültige Gewicht auf die
Z-Verschiebung gewirkt hat. Aus diesem Grund nehmen wir einen
größeren Motor Drehmoment von 3 Nm besitzt.
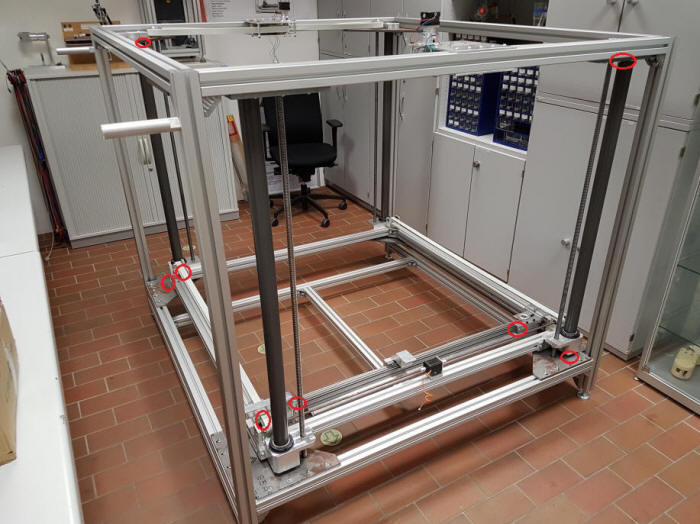
Zur Absoicherung damit es keine Kollisionen gibt werden
an jeweiligen Enden der Achsen Enschalter montiert werden. Im Bild
unten sind die Positionen jeweils rot markiert.
Abb. 4: großer 3D Drucker mit gekennzeichneten Bereichen für
Endschalter
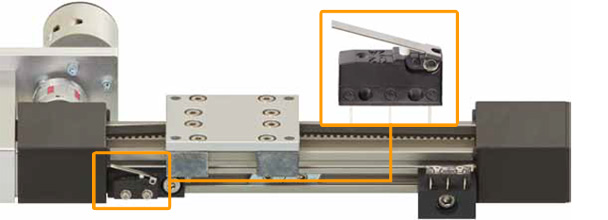
Ein Endschalter definiert eine bestimmte
Position. Fährt ein Schlitten über den Endschalter, wird ein Kontakt
im Schalter geschlossen und die Bewegung des Schlittens über den
Motor gestoppt.
Abb. 5: Prinzip des Endschalters
Universal CNC Box
Für eine Bachelor-Arbeit wurde eine Universal CNC Box entwickelt.
Diese enthält zwei Motortreiber, zwei Spannungsversorgungen, einen
ESP32 und verschiedene Anschlüsse für Sensoren. Durch die Universal CNC Box
können die Motoren eines 3D Druckers einzeln angesteuert werden.
Ein CAD-Modell wird in eine CAM-Software (slic3r) geladen, um dort das Modell
in
einen G-Code zu wandeln. Dieser G-Code wird danach auf den ESP32 in der
Box hochgeladen. Über den Mikrocontroller werden dann die Motoren
angesteuert.
Der Aufbau eines G-Codes: Beispiel: G1 X61.402
Y41.789 E2.14774 F1800.00 G1 = Art des Befehls, G1 steht für
Vorschub X61.402 = Fahranweisung in X-Richtung, Fahre an Position
61.402 auf der X-Achse Y41.789 = Fahranweisung in Y-Richtung,
Fahre an Position 41.789 auf der Y-Achse E2.14774 = E steht für
die die Länge des zu druckenden Filaments F1800.00 =
Geschwindigkeit des Schlittens