Im folgenden Absatz sieht man den aktuellen Stand
vom 15. April 2020 zu den drei neuen
Cody++ Blöcken. Am Ende noch ein kurzes Video, wie unser aktuelles
Problem der Motoren aussieht, dass wir beheben wollen.
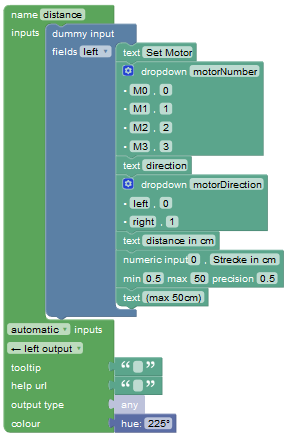
Erster Baustein - eine definierte Distanz eingeben:
Der Benutzer
sieht am Schluss nur noch diesen Baustein, er kann zwischen den zwei
Motoren und der Fahrtrichtung wählen und eine definierte Distanz
eingeben, die der Mal Roboter fahren soll.

Im Hintergrund sieht das ganze dementsprchend anders aus,
wir haben den neuen Funktionsblock mit diesen Blockly Blöcken
erstellt.
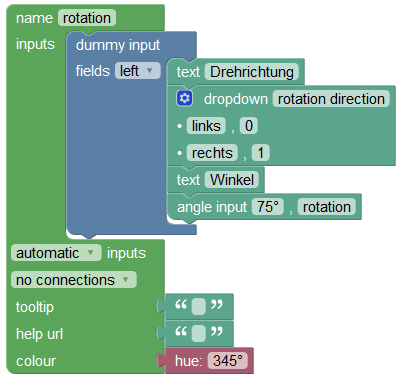
Zweiter Baustein - eine gewünschte Rotation fahren:
Der
Benutzer kann bei diesem Baustein die Richtung und den Winkel
eingeben, die das Auto fahren soll. Die Darstellung für den Benutzer
sieht folgendermaßen aus.

Dies erreicht man mi den vorhanden Blockly Blöcken, die wir wie
folgt aneinander gereiht haben.
Dritter Baustein - eine Variable setzen:
Eine weiter
Aufgabe war es, dass man eine Variable setzen kann, da dies mit
einer der wichtigsten Funktionen beim Programmieren ist. Damit die
Benutzer auch diesen Umgang beigebracht bekommen, haben wir einen
solchen Baustein erzeugt.
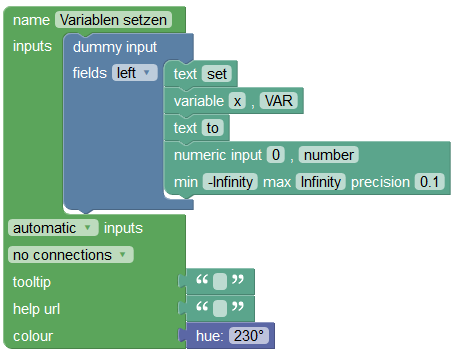
Auch dieser Baustein konnte mit vorhanden Blockly Bausteinen
erstellt werden und sieht wie folgt aus:
Als nächste Aufgabe werden wir den Internal Code anpacken,
sodass die Bausteine in unserem vorhandenen Programm auch
funktionieren und eingebunden werden.
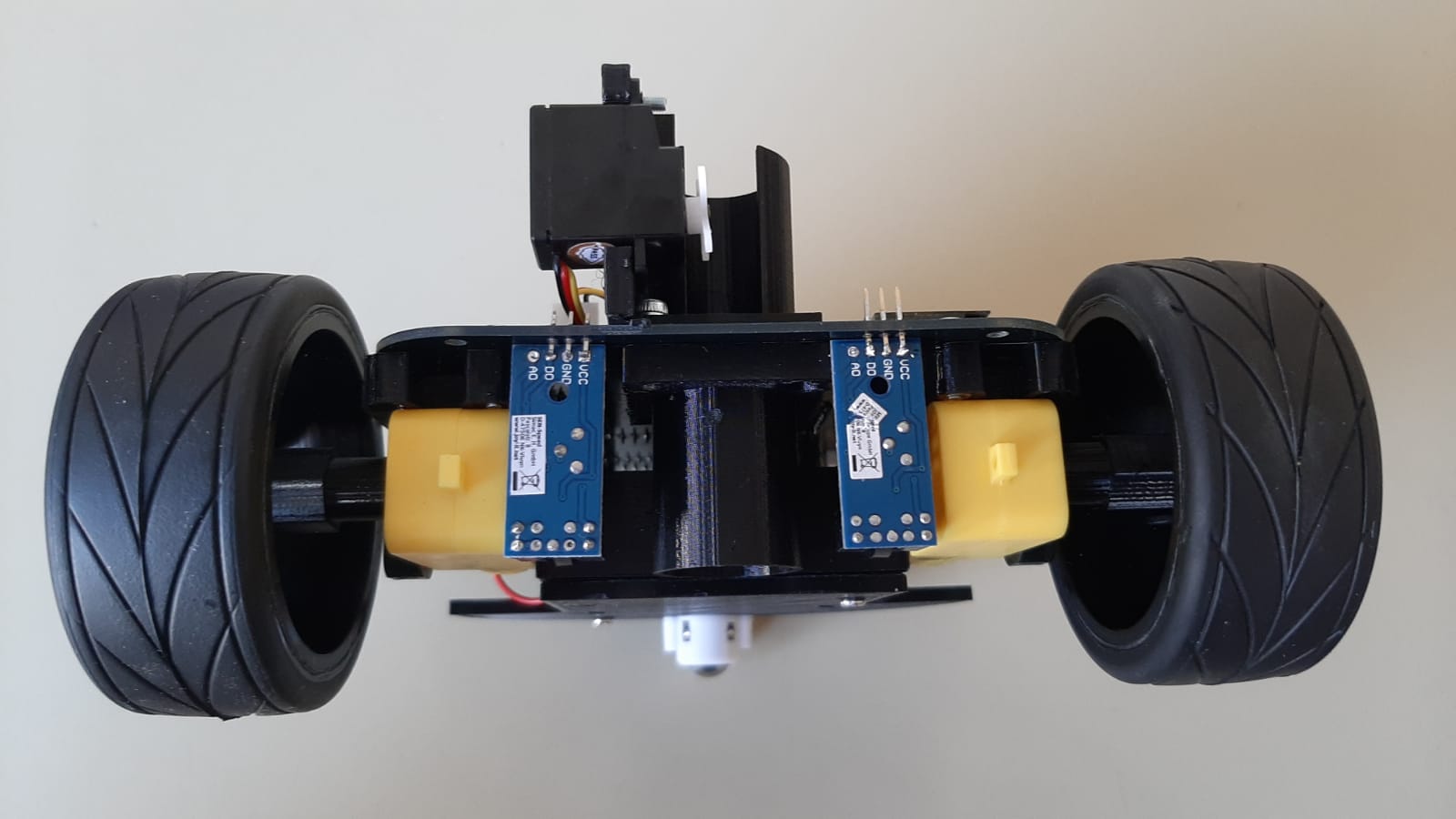
Die Encoder
mit den zwei Laserlichtschranken sind mittlerweile angebaut und sind
funktionstüchtig.
Ansicht von unten:
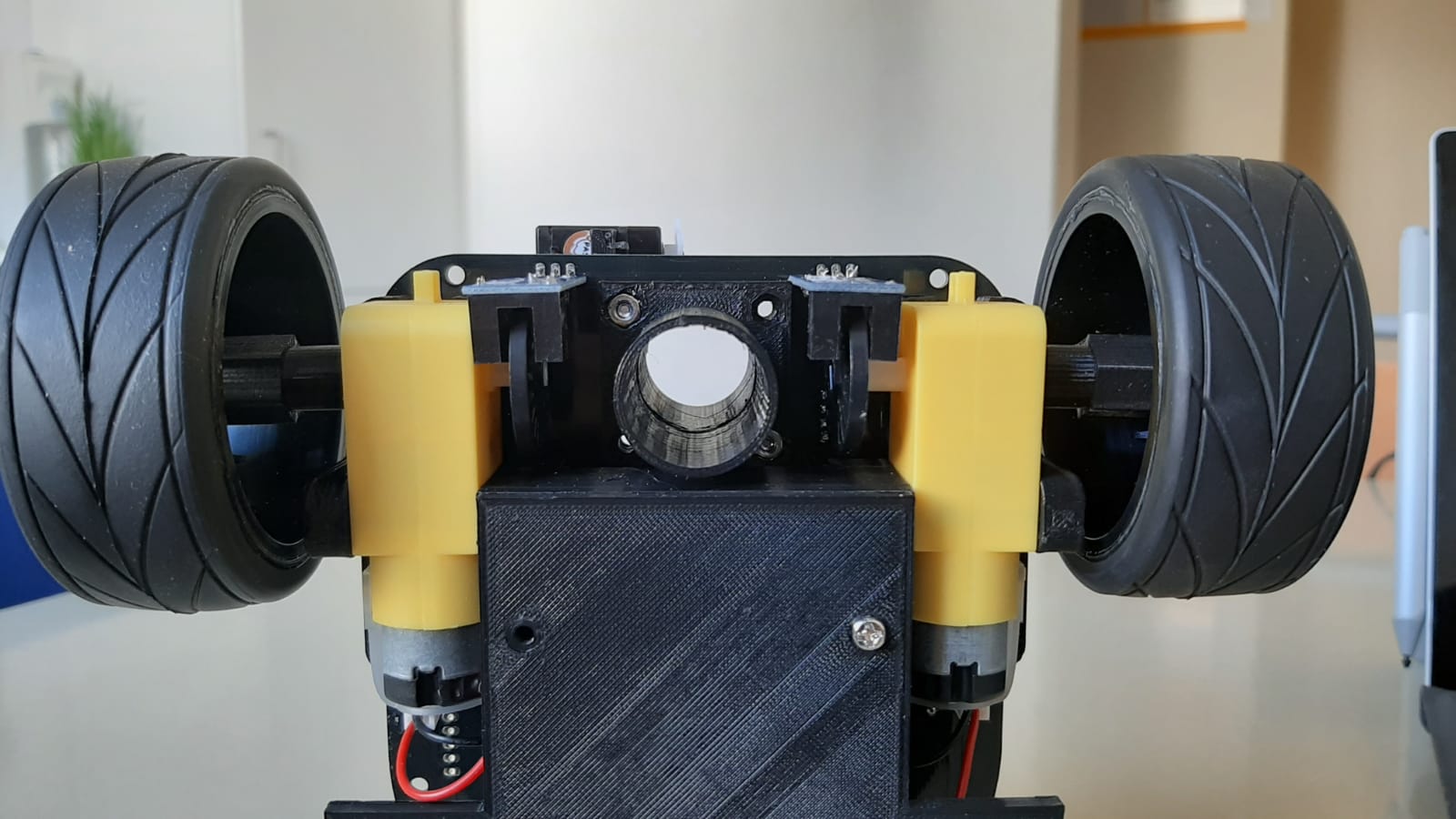
Ansicht von hinten
Eine weiteres Problem und damit eine weitere Aufgabe wird in dem
folgenden Video gezeigt:
Video_eMalRob.mp4
Man sieht hier ganz deutlich, dass die Motoren nicht gleichzeitg
abgeschaltet werden. Wenn man genau hinschaut, werden Sie auch nicht
gleichzeitig eingeschaltet, dies erkennt man an einem kleinen Zucken
beim Losfahren.
Die Auswertung der Encoder sieht wie folgt
aus:
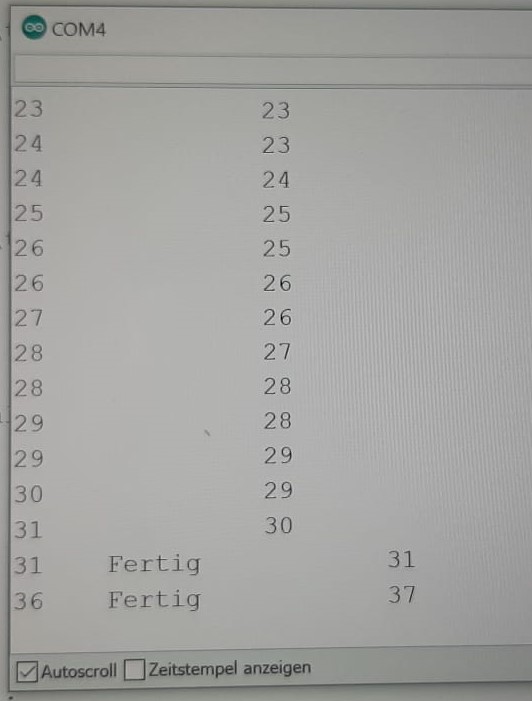
Die Räder laufen relativ synchron, ab der Zählung 30 der Encoder
sollen beide Motoren stoppen, dabei sieht man einen deutlichen
Unterschied. Das eine Rad hält bei 31 an, das andere läuft bis zur
Zählung Nummer 37 weiter. Dieses Problem wird in den nächsten Wochen
behandelt und hoffentlich behoben.
|