|
|
Analyse der
Motoransteuerung |
|
|
|
Bei folgenden Lösungsansätzen wird nur die Programmierung der
Motoransteuerung verändert. Es sind keine mechanischen Änderungen an
dem System vorgenommen worden. |
Release
Mit dem Release-Befehl wird die
Spule nur bestrom, solange sich der Rotor bewegen soll (um
einen Schritt zu verfahren). Sobald der Motor steht wird
kein Strom durch die Spule geschickt.
Schaltet man nun
Release ein, versucht der Motor sich zu drehen, doch bleibt
immer stehen. Es tritt ein ähnlicher Effekt auf, wenn man
den Schlitten beispielsweise mit der Hand blockiert und das
Drehmoment des Motors nicht ausreicht. Es wurde eine
Vermutung aufgestellt, dass durch den Release der Rotor sich
überdreht und die Spule zum Antreiben nicht hinterherkommt.
Sobald man die Geschwindigkeit stark reduziert fährt der
Schlitten wieder wie gehabt.
Da höhere Drehzahlen mit
diesem Modus nicht möglich sind und das Verhalten in
Hinblick auf die Schwingungen sich sogar etwas
verschlechtert, wird die Releaseeinstellung verworfen und
nicht weiter betrachtet. |
|
Mikroschrittbetrieb
Beim Mikroschrittbetrieb wird
mithilfe von einer PWM die Auflösung des Drehwinkels stark
erhöht. Dadurch ist die Drehrate auch deutlich verringert.
Die Frequenz mit der die Daten zum Motorshield übermittelt
werden ist die maximale Frequenz wie schnell sich der Motor
drehen kann. Ein Versuch die Datenaustauschfrequenz über
die Ardunioumgebung zu erhöhen ist leider gescheitert. Daher
muss mit einer Drehrate von etwa 5 rpm weitergearbeitet
werden.
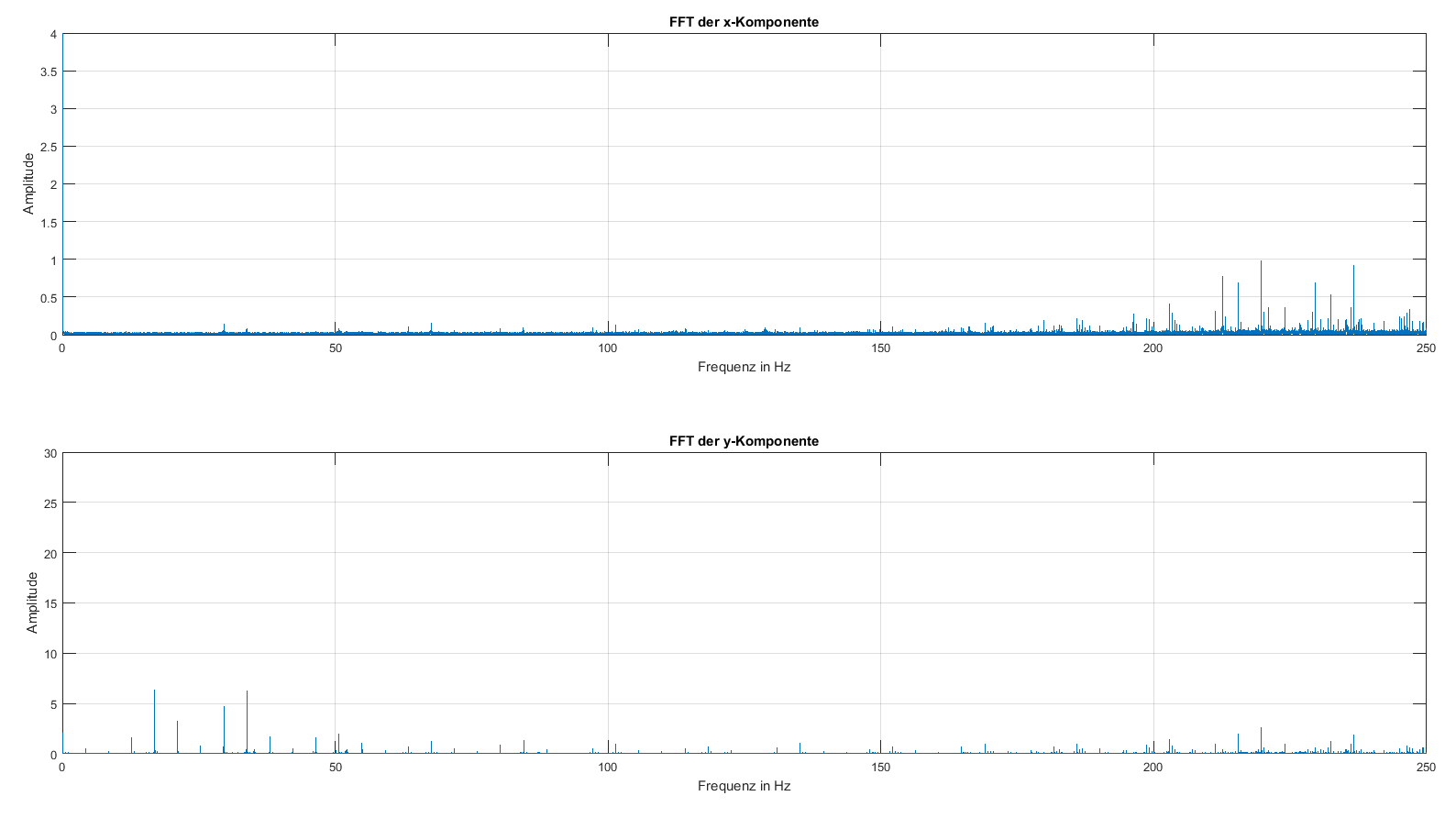
Betrachtet man die spektrale Verteilung der
Schwingungen und deren Amplituden kann man eine deutliche
Verringerung deren erkennen.
Die Achsenskalierung wurde hierbei
bei beiden Graphen jeweils um den
Faktor 10 verringert. Es sind zwar nicht zwei
Schwingungen bei 15 Hz und bei 30 Hz zu erkennen, diese sind
aber deutlich schwächer, als die bei dem
Normalschrittbetrieb.
Ein kleiner Nachteil beim
Verwenden des Mikroschrittbetriebes ist ein Ton, welcher
durch die Ansteuerungsfrequenz der PWM erzeugt wird.
Allerdings ist dieser nicht sonderlich lauter, als die
generelle Geräuschkulisse, welche durch die Mechanik und den
Motor verursacht wird.
Der RMS des Signals zum
obigen Graph ist 25,5.
|
|
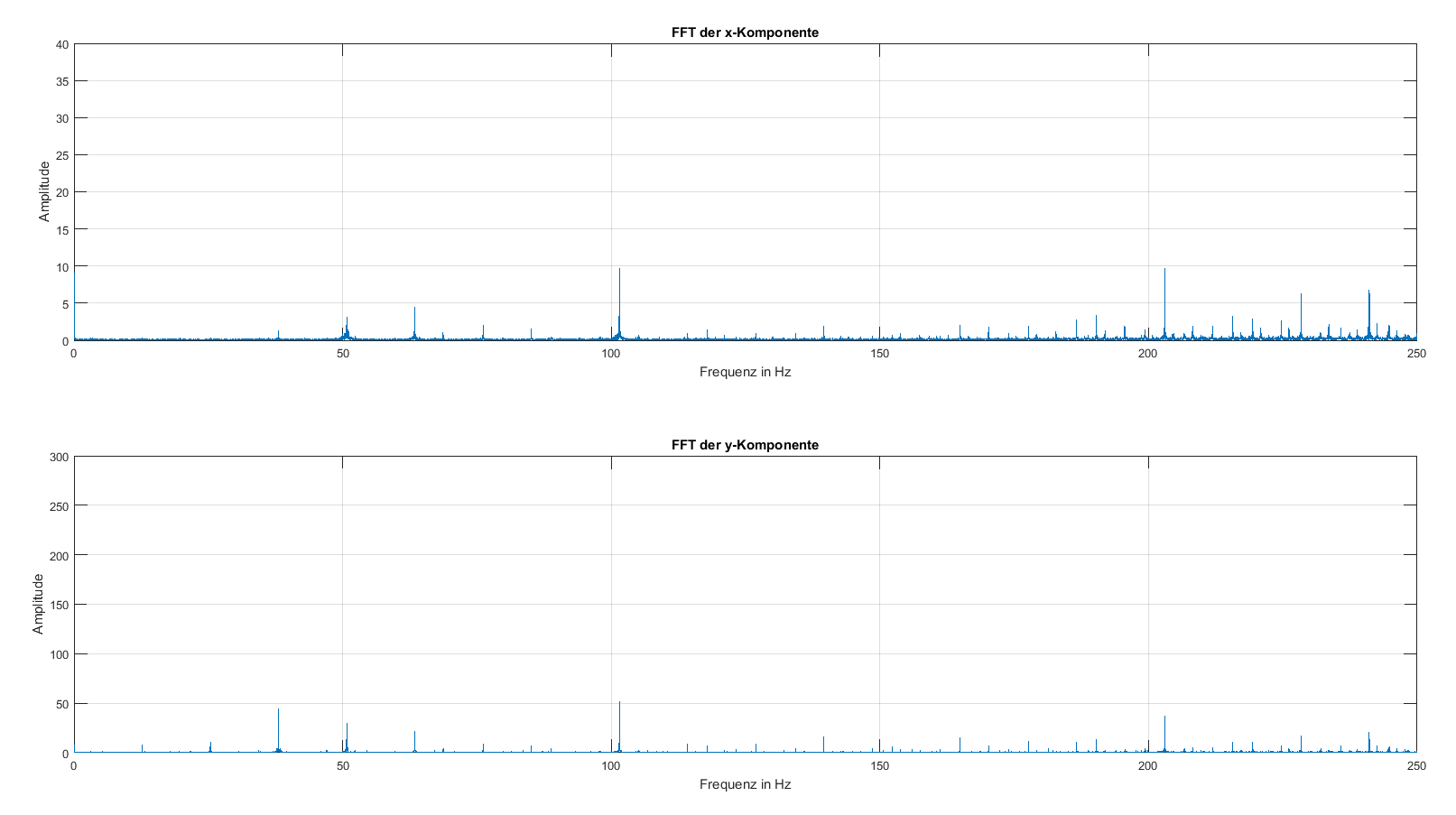
Interleave-Spulenansteuerung
Hierbei wird der Singlecoil- und
der Doublecoilmodus kombiniert um eine höhere Auflösung zu
ermöglichen. Diese ist etwas höher, als bei dem
Single/Doublecoilmodus, allerding deutlich niedriger als jene
mit im Mikroschrittbetrieb.
Das quadratische Mittel des Messsignals im Interleave-Modus
bei vergleichbarer Drehzahl zum Doublecoilbetrieb ist
200. |
|
Fazit
| Es wurde eine deutliche
Schwingungsreduktion beim Mikroschrittbetrieb sichtbar. Auch
der Interleave-Betrieb hat eine Verbesserung der Stabilität
als Effekt. Allerding leidet darunter die
Verfahrgeschwindigkeit. |
|
 |
Um generell die Menge (Anzahl und Amplitude) aller
Schwingungen zu quantitativ zu bestimmen wird hierbei der
quadratische Mittelwert (RMS) des Messsignals herangezogen.
Diese Werte lassen esich einfacher miteinander
vergleichen.
Der RMS bei der Referenzmessung
(Ausgangszustand) im Doublecoilbetrieb bei 10 rpm liegt bei
318 |
|
|