|
Um die Schwingungen des Schlittens quantitativ
zu bestimmen, soll die Beschleunigung dessen in die drei
verschiedenen Raumrichtungen ermittelt werden.
Dafür wird der Bosch XDK Sensor herangezogen.
Diese Prototyping-Platform hat diverse Sensoren eingebaut und kann
in unterschiedlichen Bereichen eingesetzt werden.
Um den Aufwand für das Sammeln der Daten zu
minimieren wird ein bereits vorprogrammiertes Beispielprogramm
verwendet. Das sogenannte Logger-Beispiel zeichnet, sobald eine
Taste gedrückt wird, alle Messwerte von den auf „enable“ gestellten
Sensoren auf. Die Daten werden anschließend auf eine SD-Karte
gespeichert.
Folgendes logger.ini File liefert dem Sensor
die Information, welche Sensoren mit welcher Abtastrate gesampelt
werden sollen. Zudem kann man einen Tiefpass vorschalten um Aliasing
zu verhindern.
| |
[general]
;
Specify filename in sprintf format
filename=log_%04i.csv
; Output file format: [csv, json, custom]
fileformat=csv
; Output data format: [raw, unit]
dataformat=unit
[bma280]
; Sensor enabled? [0, 1]
enabled=1
;
Sensor Sampling Rate in Hz: [0.0001 - 1000]
sampling_rate=100
; Sensor Range in +- g: [2, 4, 8, 16]
range=16
; Sensor Bandwidth in Hz (or unfiltered): [7.81,
15.63, 31.25, 62.5, 125, 250, 500, unfiltered]
bandwidth=500 |
|
Der eingebaute Beschleunigungssensor, BMA280
speichert die gemessenen Beschleunigungen mit einem Zeitstempel in
eine csv-Datei (comma seperated values).
Die Datensätze können dann mithilfe von
Tabellenkalkulationsprogrammen oder Matlab ausgewertet werden.
Messungen
Referenzmessung
EMV (elektromagnetische Verträglichkeit) spielt
in der Sensor- und Elektrotechnik eine große Rolle. Störungen und
ungewolltes Rauschen wirkt unterschiedlich stark auf das Nutzsignal
aus. Dadurch können Fehlinterpretationen des Signals resultieren.
Folgende Messung soll den Einfluss der Steuerelektronik und des
Verstärkershields auf den Sensor evaluieren.
Der Sensor ist mechanisch von der Kameraschiene
entkoppelt.

Folgender Graph zeigt den zeitlichen Verlauf
zweier Beschleunigungssignale zweier orthogonal zueinander
zeigender Richtungen (parallel zur Horizontalen).
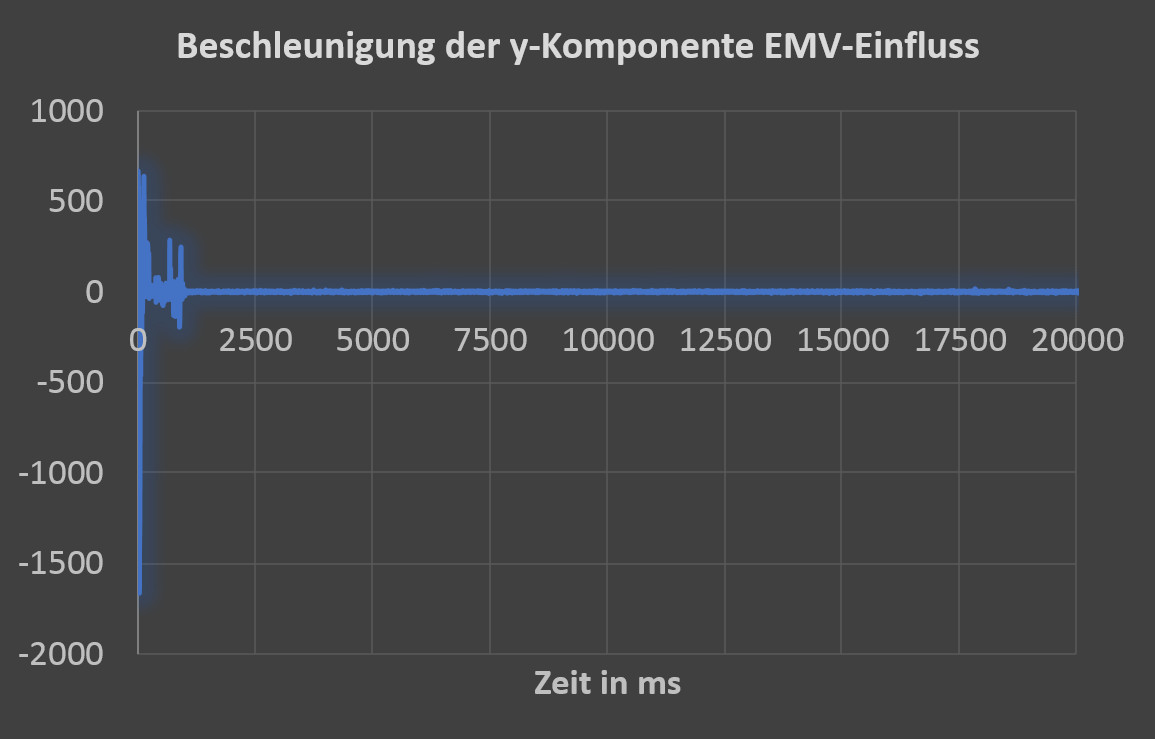
Die Kurve beschreibt die meiste Zeit des
Intervalls [0 – 20 000 ms] annähernd eine Gerade. Am Anfang sind
deutliche Amplituden erkennbar. Diese wurden höchstwahrscheinlich
durch das Betätigen des Startknopfes hervorgerufen. Der Knopf ist
direkt, mechanisch mit dem Sensorgehäuse gekoppelt und registriert
die Kraft vom Knopfdrücken.
Generell sind aber die Störeinflüsse deutlich
kleiner (lassen sich in dieser Skalierung nicht erkennen) als das
Nutzsignal.
Messung der Vibrationen bei verschiedenen Geschwindigkeiten
Bei der folgenden Messreihe wird die
Ansteuerungsfrequenz des Motors von 10 rpm (U/min) auf 100 rpm in 10
Stufen schrittweise erhöht. Dabei wird jeweils unterschieden, der
Schlitten von der Antriebsplattform zum gegenüberliegenden Ende oder
in die gegenläufige Richtung verfährt. Bei jeder Messung wurde immer
der komplette Fahrweg aufgenommen.
Generell würde, wie im oberen Graph, eine
zeitdiskrete Analyse ausreichen um die generelle Vibration des
Schlittens zu quantifizieren. Um aber genau zu bestimmen, welche
Frequenzen in welchen Anteilen in dem Signal enthalten sind, wird
eine Transformation in den Frequenzbereich herangezogen.
Die Abtastrate des Sensors liegt maximal bei
500 Hz. Deshalb kann laut dem Nyquist-Shannon-Abtasttheorem das
Spektrum bis 250 Hz (Abtastrate/2) aufgetragen werden.
Bei folgenden Graphen ist die spektrale
Verteilung immer einer Messfahrt von sowohl der x-, als auch von der
y-Komponente gezeigt.
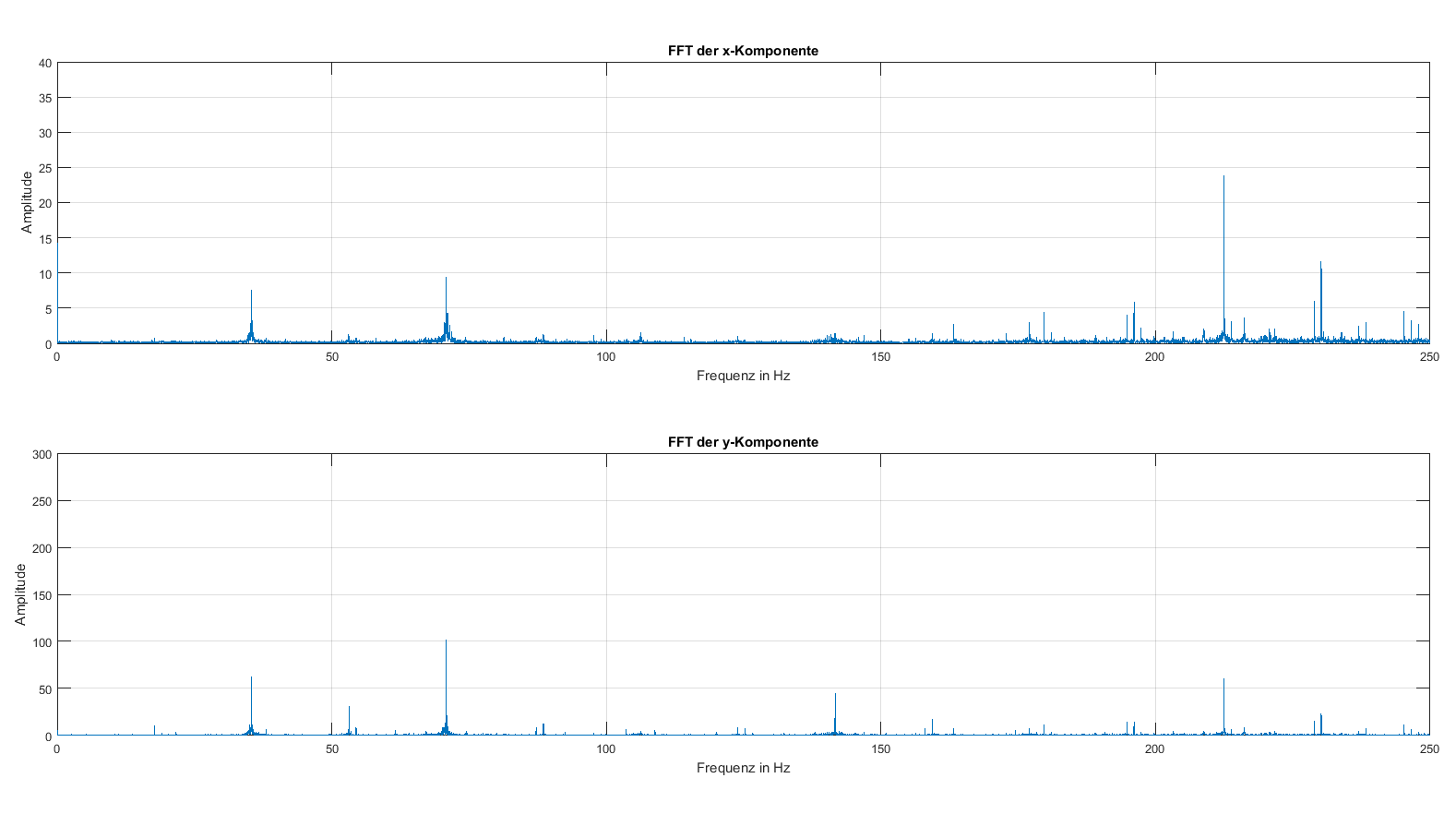
Die Grafik
zeigt deutlich, dass Schwingungen bestimmter Frequenzen deutlich
stärker vorkommen, als andere (kein weißes Rauschen, wie bei der
EMV-Messung). Außerdem sind deutlich Gemeinsamkeiten der beiden
Untergraphen (x-Komponentente / y-Komponente) erkennbar. Der
Hauptunterschied ist dabei nur die Amplitude der Schwingungen. Die
Schwingungen in die y-Komponente sind dabei bis zu zehnmal größer
als die, der gleichen Frequenz in die x-Richtung. Daher wird davon
ausgegangen, dass die Schwingungsanregung aus der y-Achse entsteht.
Die Schwingungen in x-Richtung ist daher eine Folge der
meschanischen Kopplung. Aus diesem Grund wird sich in folgender
Betrachtung nur auf die y-Komponente der Beschleunigung bezogen und
nur diese ausgewertet.
In dem
unterem Frequenzspektrum sind vier Nadeln (Peaks) bei
unterschiedlichen Frequenzen erkennbar. Die erste Nadel repäsentiert
die Anregungsfrequenz, mit welcher der Schrittmotor die Spulen
ansteuert. Die weiteren Peaks sind die Harmonischen, Schwinungen
welche eine n-fache Frequenz der Grundschwingung besitzen.
In folgender
Messung wurde die Amplitude der Grundschwingung bei den einzelnene
Drehgeschwindigkeiten gemessen und auf einen Graphen aufgetragen
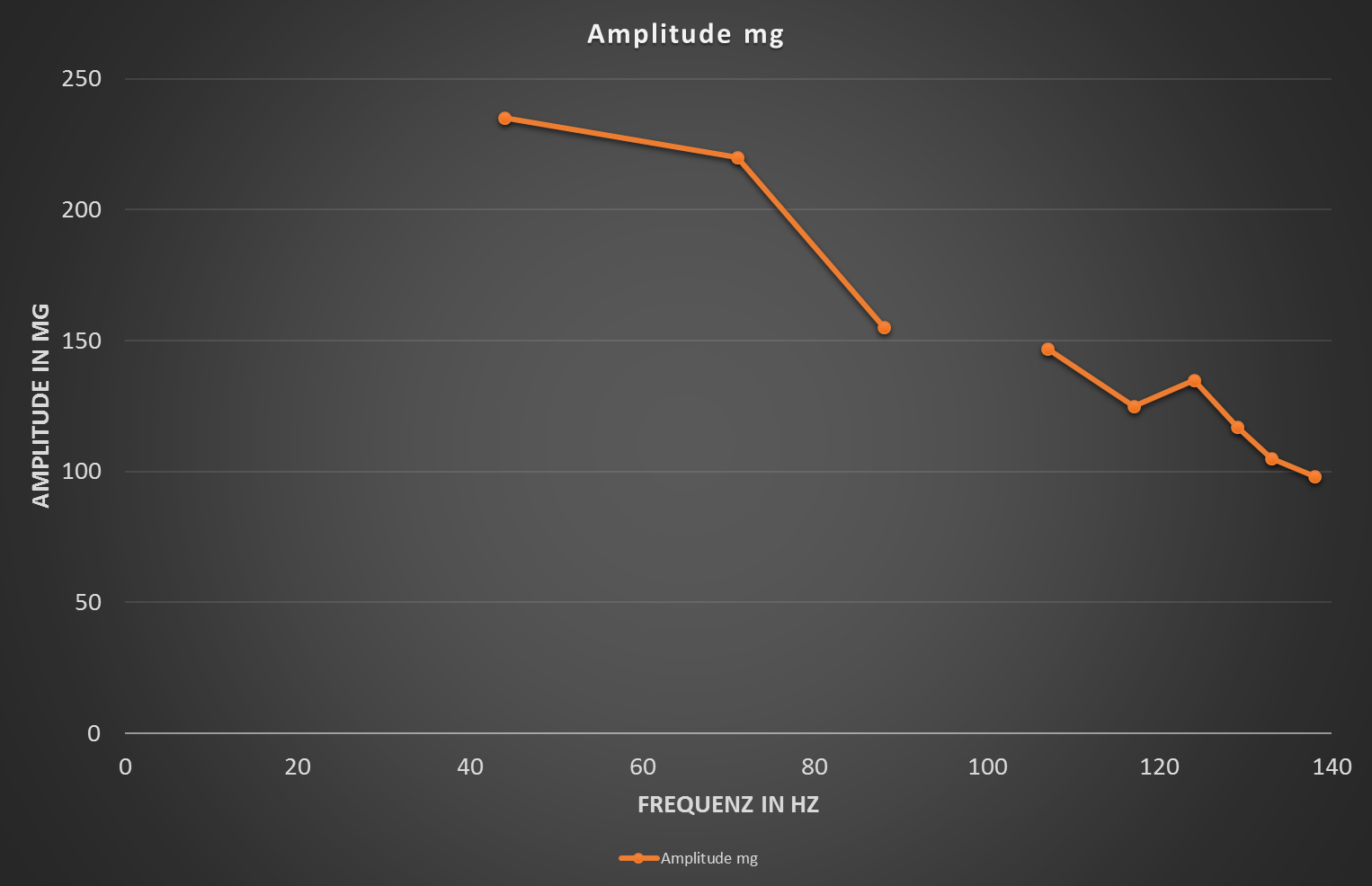
Wie in diesem Graphen deutlich zu sehen, fällt die Amplitude der
Grundschwingung je schneller sich der Motor dreht. Daher soll bei
folgenden Auswertungen nur die niedrigste Drehrate des Motors als
Referenz gewählt werden um bei den verschiedenen Verbesserungsansätzen die
größt mögliche Differenz zu erhalten.
|