|
Schritt 1 (nur bei erstmaliger Inbetriebnahme nötig):
Unter Linux:
Zu Beginn müssen die erforderlichen Daten auf den ESP32 geladen
werden. Hierfür verwendet man das Shell Script makeSpiffsLinux,
welches die Dateien aus dem Ordner ./data auf den ESP32 lädt.
Gegebenenfalls muss das Script noch ausführbar gemacht werden
(sudo chmod +x ./makespiffs.sh).
Außerdem muss man noch das INO File ESP32WebserverIDE in der
ArduinoIDE öffnen und auf den ESP32 laden. Hierfür muss man die
ArduinoIDE erweitern, dies ist im folgenden Link beschrieben:
-> https://github.com/espressif/arduino-esp32/blob/master/docs/arduino-ide/debian_ubuntu.md
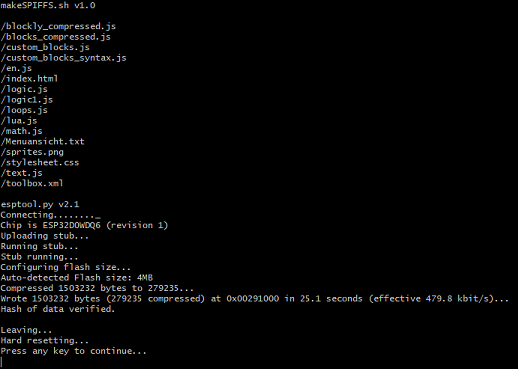
Abb.: Ausgabe des Shell Scripts unter Windows
und Linux
Unter Windows:
Zu Beginn müssen die erforderlichen Daten
auf den ESP32 geladen werden. Hierfür muss unter Windows zuerst
Python installiert werden (https://www.python.org/downloads/).
Danach kann man das Shell Script makeSpiffsWindows ausführen, dieses
lädt die Dateien aus dem Ordner ./data auf den ESP32.
Außerdem muss man noch das INO File
ESP32WebserverIDE in der ArduinoIDE öffnen und auf den ESP32 laden.
Hierfür muss man die ArduinoIDE erweitern, dies ist im folgenden
Link beschrieben:
https://github.com/espressif/arduino-esp32/blob/master/docs/arduino-ide/windows.md
Schritt 2:
Nun kann man sich per WLAN mit dem ESP32
verbinden. Die SSID ist ESP32ap und das Passwort lautet 12345678.
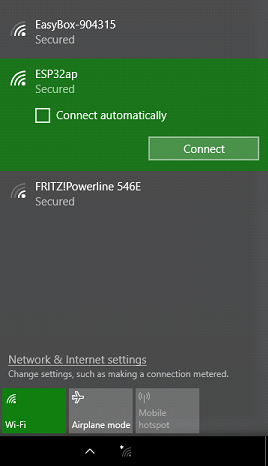
Abb.: Verbindung mit ESP32 aufbauen
Schritt 3:
Durch das Aufrufen der IP-Adresse
192.168.4.1 im Browser wird die Website geladen. Je nach
Anwendungsfall kann das Laden der Website unterschiedlich lange
dauern.
Abb.: Ladebildschirm der Webanwendung
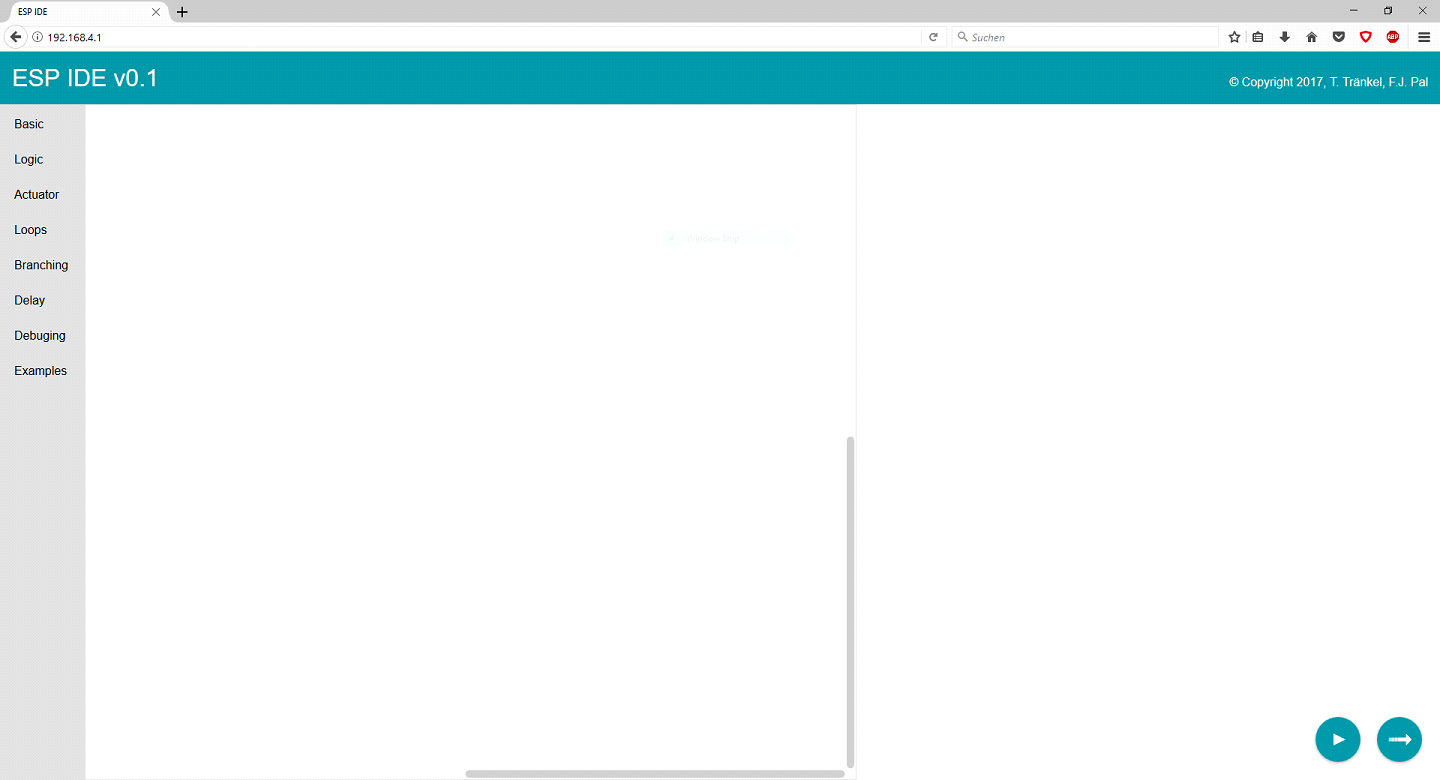
Abb.: Geladene Webanwendung
Schritt 4:
Nun kann mit Hilfe der Programmierumgebung
ein Programm für den Fischertechnik Roboter erstellt werden.
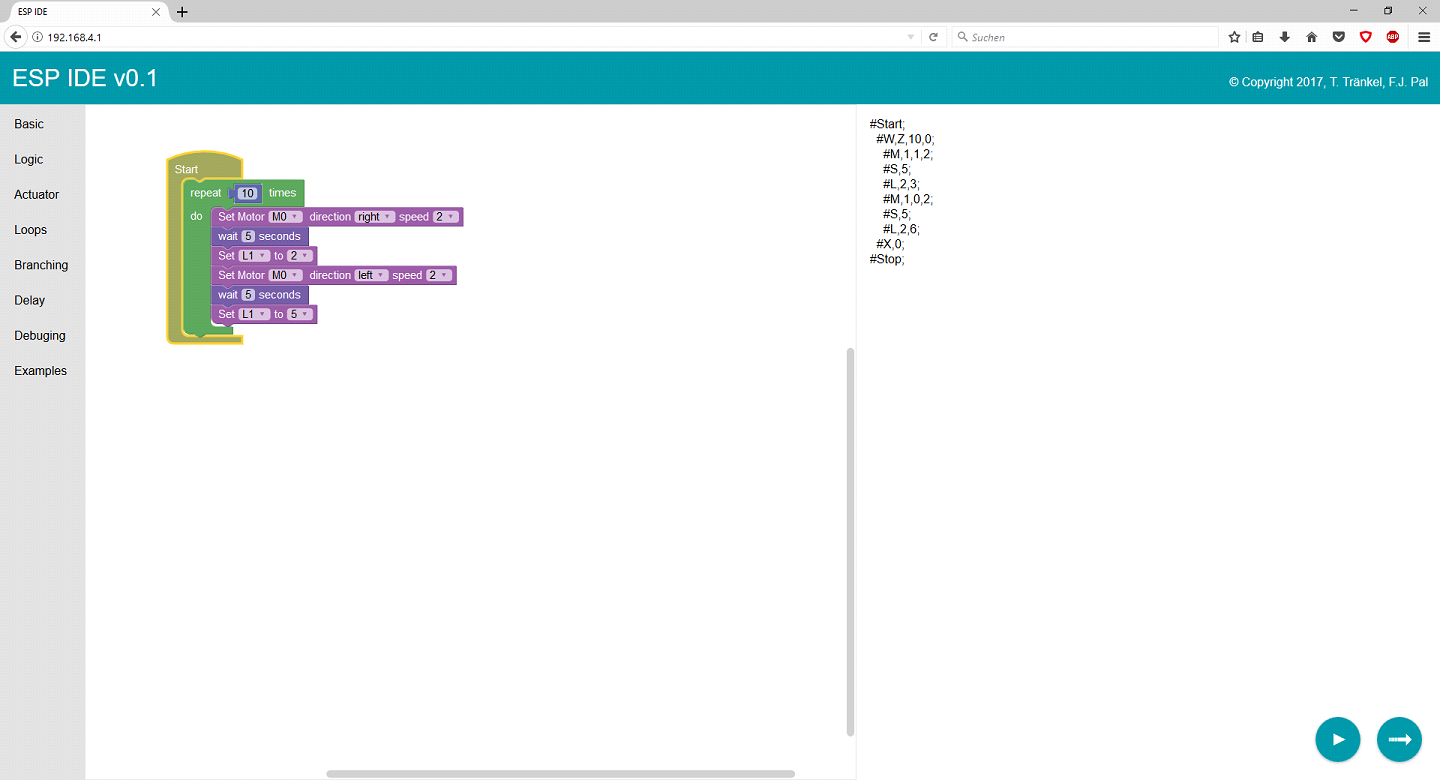
Abb.: Beispielprogramm
Schritt 5:
Nachdem das Programm erstellt wurde, wird
durch das Betätigen des SEND-Buttons der Code an den ESP32
übertragen. Dieser übernimmt dann die Ansteuerung der einzelnen
Komponenten. Gegebenenfalls kann das laufende Programm über die
Buttons Play/Pause und Stop gesteuert werden.
|