|
|
EU4M / energieeffiziente
Mikrocontroller Ortungssysteme für Swimming-Pixel |
Wintersemester 2019 Mitglieder |
|
|
EU4M / energieeffiziente
Mikrocontroller Ortungssysteme für Swimming-Pixel |
Wintersemester 2019 Mitglieder |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Folgende verschiendene Alternativen zur Positionsbestimmung wurden evaluiert:
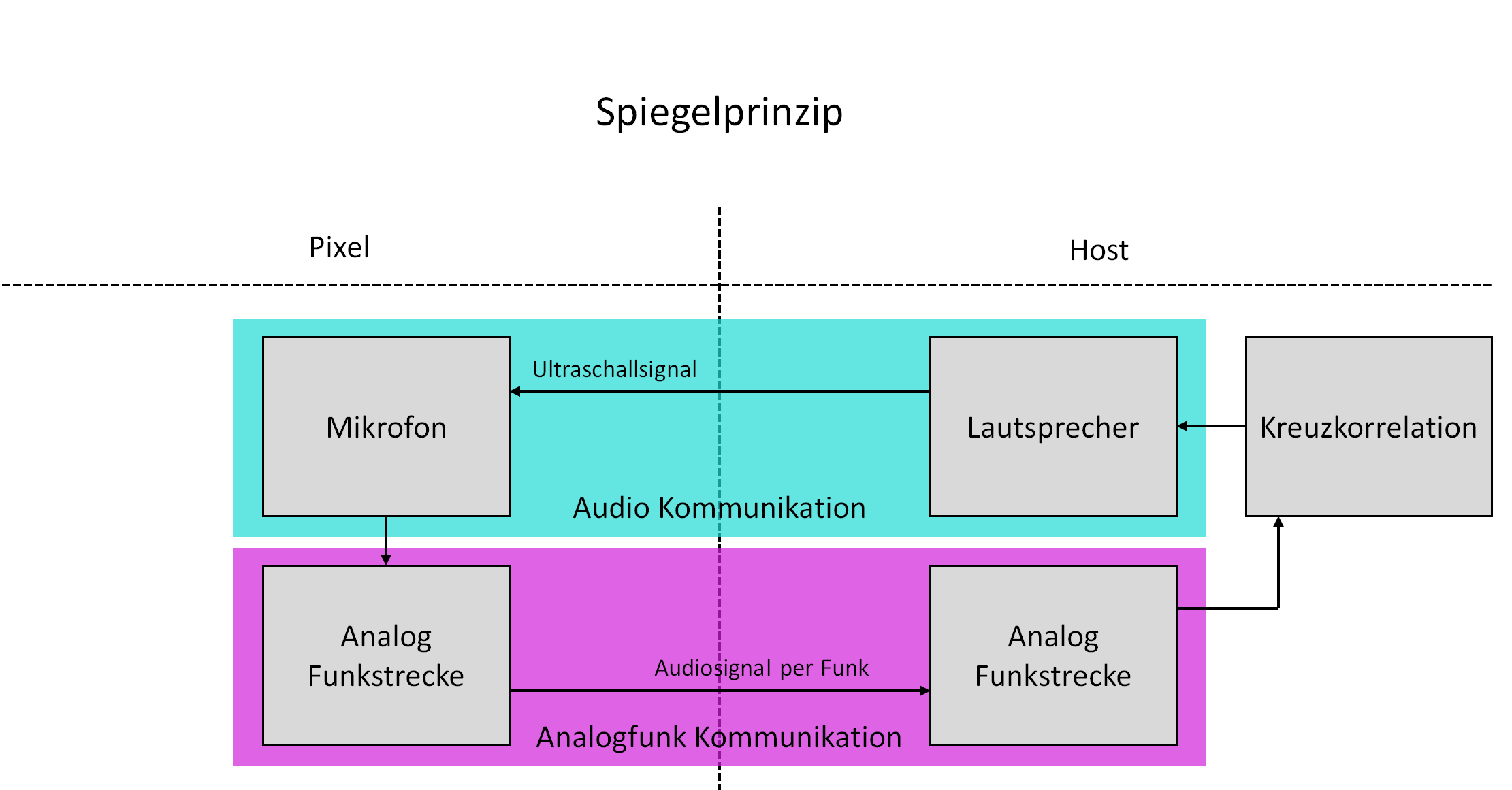
1. Spiegel Prinzip
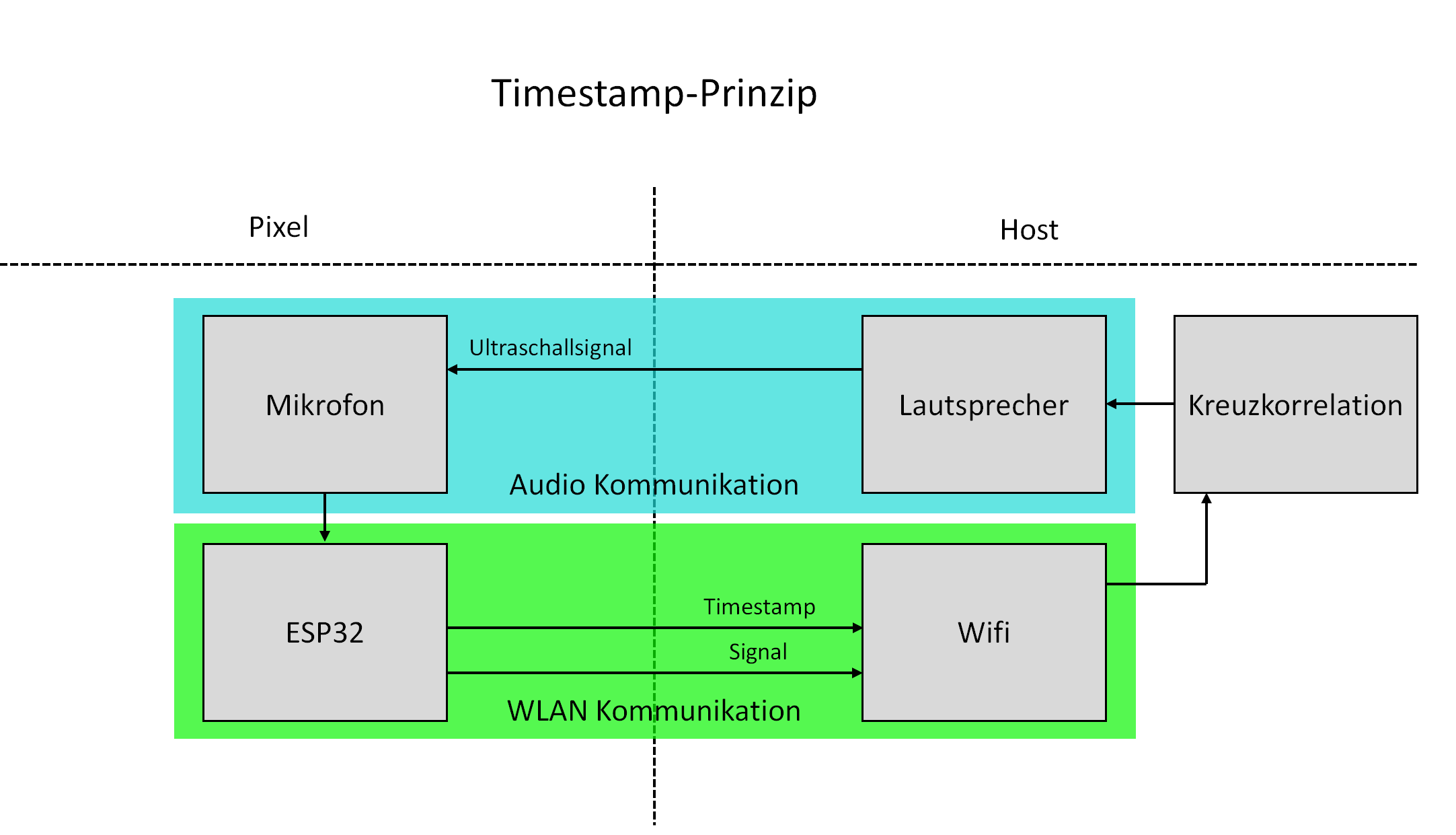
Ein Audiosignal wird als Schall vom Host geschickt, welches vom Mikrofon auf dem Pixel detektiert und als RF Signal an den Host zurückgesendet. Die Auswertung erfolgt über eine Kreuz-Korrelation. + Signalverarbeitung nur auf Host + keine Synchronisation notwendig - nicht parallelisierbar - RF-Audiosender auf jeden Pixel benötigt 2. Timestamp Prinzip
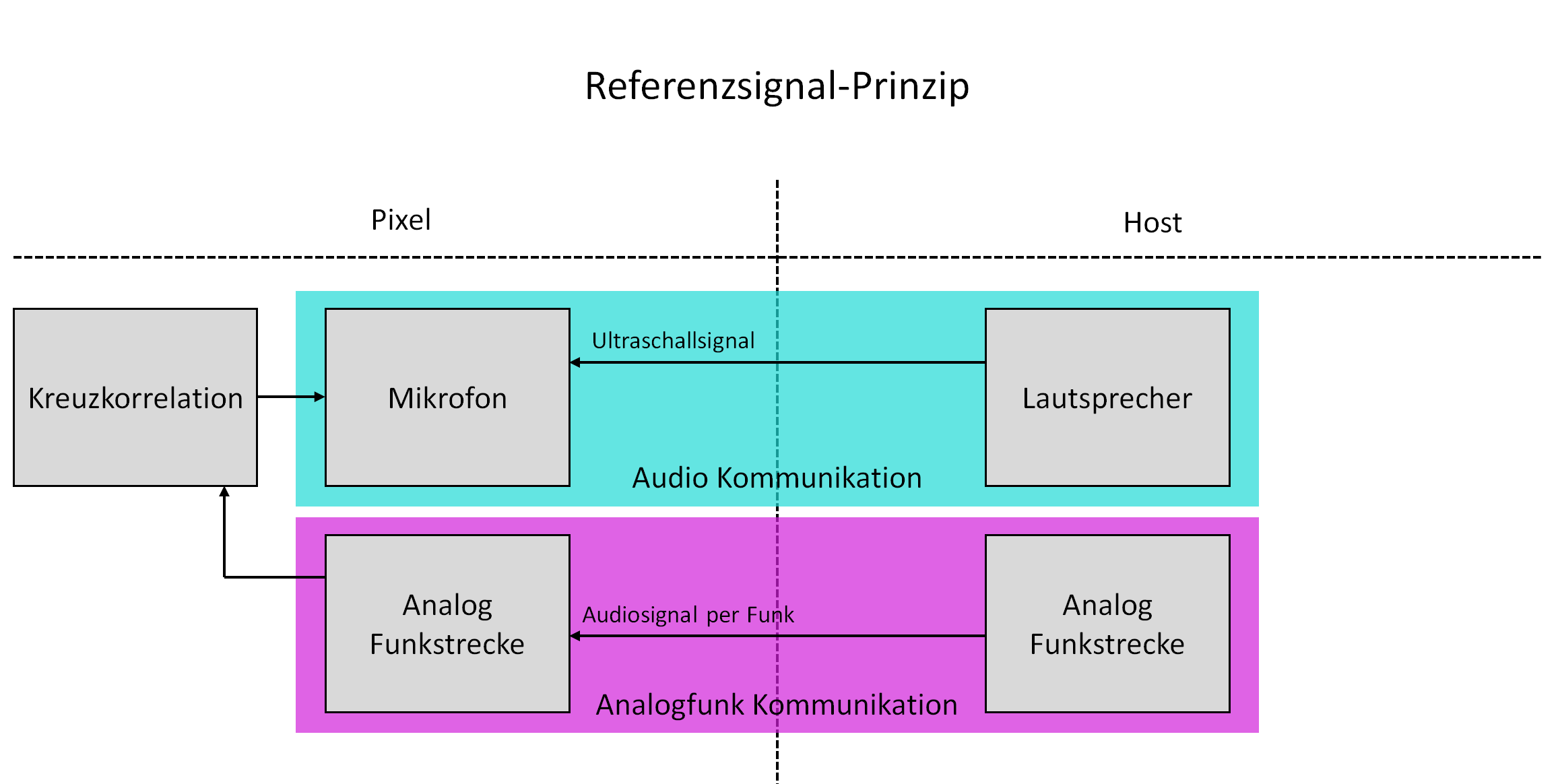
Sowohl der Host als auch der Pixel besitzen hierbei synchronisierte Uhren. Der Host sendet ein Schallsignal an den Pixel. Auf dem Pixel wird aufgezeichnet, wann das Signal detektiert wurde. Dieser Zeitstempel kann mit dem Zeitstempel des Hosts verglichen werden. Hierdurch ergibt sich die Laufzeit des Signals, wobei die Kommunikation über eine Wlan Verbindung erfolgen kann. Die Signalauswertung erfolgt durch die Differenzberechnung der Zeiten. + parallelisierbar + keine zusätzliche HW nötig - Signalverarbeitung auf Pixel (Audiosignalerkennung) - Synchronisation notwendig 3. Referenzsignal Prinzip
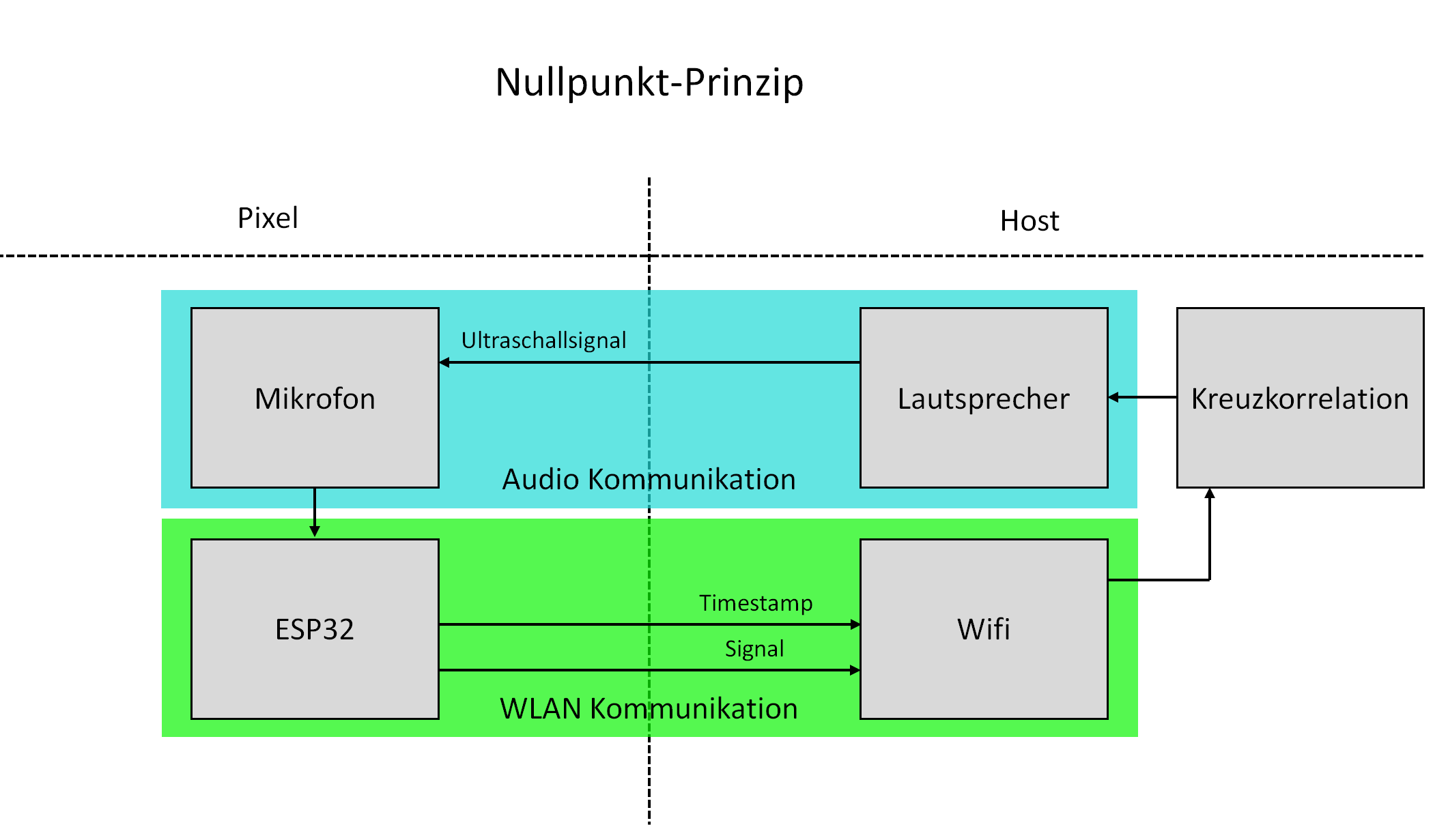
Der Host sendet ein Radiosignal und gleichzeitig ein Schallsignal an den Pixel. Die Zeitdifferenz zwischen dem Eintreffen beider Signale beschreibt die Laufzeit des Schallsignals. + parallelisierbar + keine Synchronisation notwendig - Signalverarbeitung auf Pixel - RF Empfänger auf Pixel benötigt 4. Nullpunktprinzip
Host und Pixel haben beide eine RTC, diese müssen jedoch nicht synchronisiert sein. Der Host sendet ein Schallsignal an den Pixel, während sich der Pixel an einer definierten Nullposition befindet. Die Differenz zwischen den beiden Zeiten auf Host und Pixel wird als Offset gespeichert und von zukünftigen Messungen abgezogen. Wenn sich der Pixel nun vom Host entfernt, kann eine Laufzeitdifferenz gemessen und ausgewertet werden. + parallelisierbar + keine zusätzlioche Hardware notwendig + keine Synchronisation nötig - Signalverarbeitung auf Pixel Solarpanel: Excel-Liste zum Auswahlverfahren der Solaranlage
Mit 3,2V
Abbildung
1.
Solar Zelle Verbindung,
Quelle [1] Das Design des Energieversorgungssystems wurde als autonom mit Solarenergie angesehen.
Aufgrund der geringen Pixelgröße wurden Solarzellen von nicht mehr
als 150 x 150 mm (ursprüngliche Pixelgröße) bewertet.
Tabelle
2.
Solarpanels Vergleich
Das ausgewählte Panel hat zwar eine kleinere Oberfläche, weist
jedoch eine höhere Leistung in Bezug auf die gesamte verfügbare
Oberfläche auf, wie aus der vorherigen Tabelle hervorgeht. Drei
Panels wurden parallel geschaltet, um die folgenden Ergebnisse zu
erhalten.
Tabelle
3.
Solarzelle messungen
Tabelle
4.
Batterien Vergleich
Die Batterien wurden unter Berücksichtigung der maximal verfügbaren
Autonomie ausgewählt, außerdem bieten die LiFePo4-Batterien
normalerweise mehr Ladezyklen. Ein weiterer Vorteil gegenüber LiPo-
und NiMH-Akkus ist ihre Sicherheit. LiPo-Batterien beginnen sich zu
Temperaturen bei viel niedrigeren Temperaturen als LiFePo4 selbst zu
erhitzen. LiFePo4 ist widerstandsfähiger gegen thermisches
Durchgehen und verbrennt viel weniger energetisch.
Die
Akkulaufzeit
wird mit 3,5-4.3 Stunden berechnet, sobald der Akku vollständig
aufgeladen ist
Quellen
[1] Sunny Buddy connection:
https://learn.sparkfun.com/tutorials/sunny-buddy-solar-charger-v13-hookup-guide-?_ga=2.196683756.1189801871.1584195165-399975265.1584195165
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Mit Unterstützung von Prof. J. Walter | Wintersemester 2019 |