|
|
Energieeffiziente Mikrocontroller Cor-Sen |
Wintersemester 2020 Tim Zink Tim Brachat |
|
|
Energieeffiziente Mikrocontroller Cor-Sen |
Wintersemester 2020 Tim Zink Tim Brachat |
|
|||
|
Hardware: Im Rahmen des Projektes wurde für die Verwendung eines ToF-Sensors entschieden. Der ausgewählte Sensor von ST mit der Bezeichnung VL53L0X verfügt über ausreichende Reichweite und einen geeigneten Erfassungswinkel, sodass eine Personenzählung durchgeführt werden kann. Auch das mögliche, energieeffiziente Betreiben des Carriers mit 3,3V spricht für diese Auswahl. In unseren Versuchen zeigte sich, dass ein Abstand der Sensoren von 10cm zueinander verlässliche Ergebnisse mit der von uns programmierten Software liefert. Software/Messprinzip: 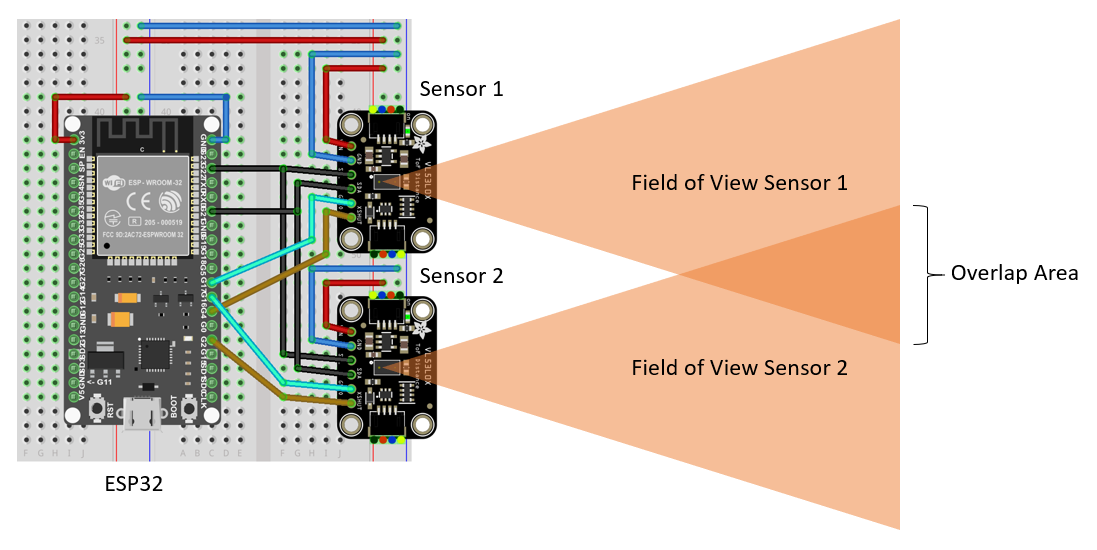
Abb.: Schematische Darstellung der Schaltung Die hier zeigte Abbildung stellt schematisch die Schaltung mit den Messbereichen der einzelnen Sensoren dar. Die Sensoren messen Abstände zu Objekten oder Personen, welche sich im Sichtfeld (Field of View, FoV) befinden. Dabei ist es nicht von Relevanz, welchen Abstand die Messobjekte zu den Sensoren haben. Es werden Änderungen im Sichtfeld detektiert. Diese Änderungen werden Mirkocontroller intern verarbeitet. Dabei beitzt jedes FoV eine eigene Variable. Wird ein Messobjekt im FoV Sensor 1 erkannt, wird eine Variable auf den Wert 2 gesetzt. Wird erkannt, dass sich kein Messobjekt mehr im FoV Sensor 1 befindet, wird die selbe Variable gleich 0 gesetzt. Für das FoV Sensor 2 gilt das gleiche Vorgehen, jedoch wird die jeweilige Variable auf den Wert 1 und 0 gesetzt. Um so eine Richtungserkennung umzusetzen, werden diese beiden Variablen bei einer Änderung im Sichtfeld addiert und die Reihenfolge der Summen betrachtet. Hierdurch ergeben sich 4 Fälle, mit welchen die Laufrichtung und auch Fehlerfälle eindeutig erkennbar sind. Ob eine Person einen Raum betritt oder verlässt hängt davon ab auf welcher Seite des Eingangs die Sensorik angebracht ist und wie es intern definiert wurde. Es kann jedoch durch einfache Anpassungen des Codes konfiguriert werden. In unserem Aufbau entspricht Fall 1 einer Person, welche den Raum betritt. Fall 2 representiert das Verlassen eines Raums. Fall 3 und 4 sind Sonderfälle, in welchen Personen vor die Sensorik treten und wieder umkehren ohne das Sichtfeld komplett zu verlassen. Auf die einzelnen Fälle wird anschließend in der nachfolgenden Fallerklärung eingegangen. Fall 1: Person betritt einen Raum 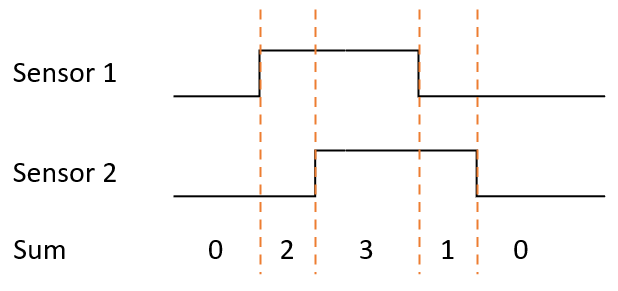
Abb.: Fall 1 in einem zeitlichem Kontext Wenn kein Messobjekt oder Person in dem Sichtfeld des Sensors erkannt wird, ist die Summe beider Variablen der Senorsignale gleich null. Betritt nun eine Person den Raum bedeutet es in dem von uns gewählten Aufbau, dass das Sensorsignal 1 zuerst getriggert und auf den Wert 2 gesetzt wird. Da eine Änderung im Sichtfeld der ToF-Sensoren stattfand, wird die Summe aus beiden Signalen gebildet und gespeichert. Anschließend wird Sensorsignal 2 getriggert und auf den Wert 1 gesetzt. Das Messobjekt befindet sich nun im Overlap-Bereich. Die Summe aus beiden Signalen wird gebildet und wieder gespeichert. Verlässt das zu messende Objekt nun das Sichtfeld des Sensors 1 wird dessen Signalvariable auf den Wert null gesetzt und die Summe gebildet. Verlässt nun das zu messende Objekt den kompletten Messbereich, so wird auch die Signalvariable von Sensor 2 auf den Wert null gesetzt. Durch die Betrachtung der Reihenfolge der Summe entsteht hierbei eine eindeutige Zahlenreihenfolge. 0 - 2 - 3 - 1 - 0 steht für das Betreten eines Raumes. Fall 2: Person verlässt einen Raum 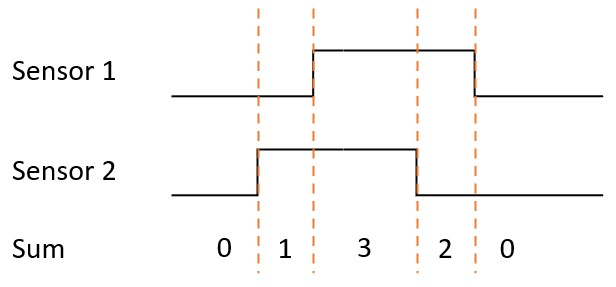
Abb.: Fall 2 in einem zeitlichem Kontext Wie bei Fall 1 werden die Sensorsignale getriggert, sobald sich ein Objekt oder eine Person im Messfeld befindet. Fall 2 beschreibt die den Fall, dass eine Person sich zuerst durch das Messfeld von Sensor 2 bewegt, den überlappenden Messbereich betritt und anschließend sich zuletzt in FoV Sensor 1 zuletzt aufhält. In unserem Aufbau entsprach die Zahlenfolge der Summe 0 - 1 - 3 - 2 - 0 dem Verlassen eines Raumes. Fall 3: Person betritt beide Sichtfelder, kehrt jedoch um 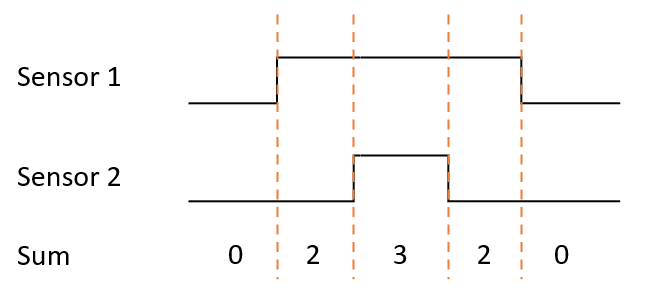
Abb.: Fall 3 in einem zeitlichem Kontext Es kann durchaus passieren, dass Personen den Messbereich betreten und wieder umkehren. Die Fälle 3 und 4 behandeln dieses Verhalten. Dabei ist es ebenfalls eindeutig an der Reihenfolge der Summe erkennbar, ob diese Fälle eingetreten sind. Läuft eine Person durch den Messbereich des Sensors 1 in den Überlappungsbereich, kehrt dann aber wieder um und verlässt das Messareal ergibt sich die Zahlenfolge 0 - 2 - 3 - 2 - 0, wenn davon ausgegangen wird, dass die Person von außen an einen Raum herantritt und bei Betreten des Raums umkehrt. Für den gegenteiligen Fall, Person möchte den Raum verlassen, kehrt jedoch im Überlappungsbereich um, ergibt sich die Zahlenfolge 0 - 1 - 3 - 1 - 0. Auch hier Ergibt sich eindeutig durch die Zahlenreihenfolge ein interpretierbares Bewegungsmuster. Fall 4: Person betritt den Raum, kehrt jedoch um 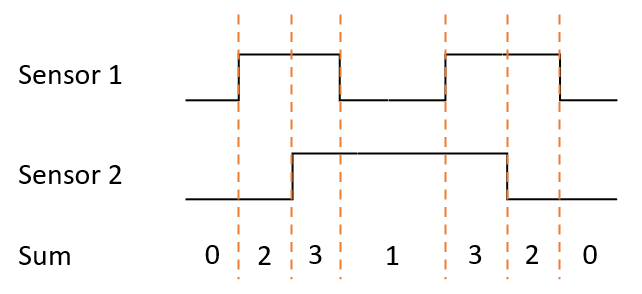
Abb.: Fall 4 in einem zeitlichem Kontext Fall 4 ist Fall 3 dem Bewegungsmuster einer Person folgend grundlegend ähnlich. Jedoch besteht hierbei der Unterschied, dass die Person nicht auf Höhe des Überlappungsbereichs umkehrt. In dem gezeigten Fall wird angenommen, dass eine Person einen Raum betreten möchte, bis nach dem Überlappbereich in den Raum hinein läuft, doch umkehrt und den Raum verlässt. Dabei ergibt sich die Zahlenfolge 0 - 2 - 3 - 1 - 3 - 2 - 0. Sollte dieses Ereignis von gegenüberliegenden Seite eintreten, ergibt sich die Zahlenfolge 0 - 1 - 3 - 2 - 3 - 1 - 0. In allen Fällen ist es somit eindeutig zuordenbar, in von welcher Richtung sich die Person in das Messfeld gegeben hat. Auch mit der Abdeckung der Fälle 3 und 4 lassen sich 1D-Bewegungsmuster von Personen im Messfeld der Sensoren interpretieren. Betreut durch: Cor-Sen Tim Zink, Tim Brachat |
| Mit Unterstützung von Prof. J. Walter | Wintersemester 2020 |