|
Solution Components
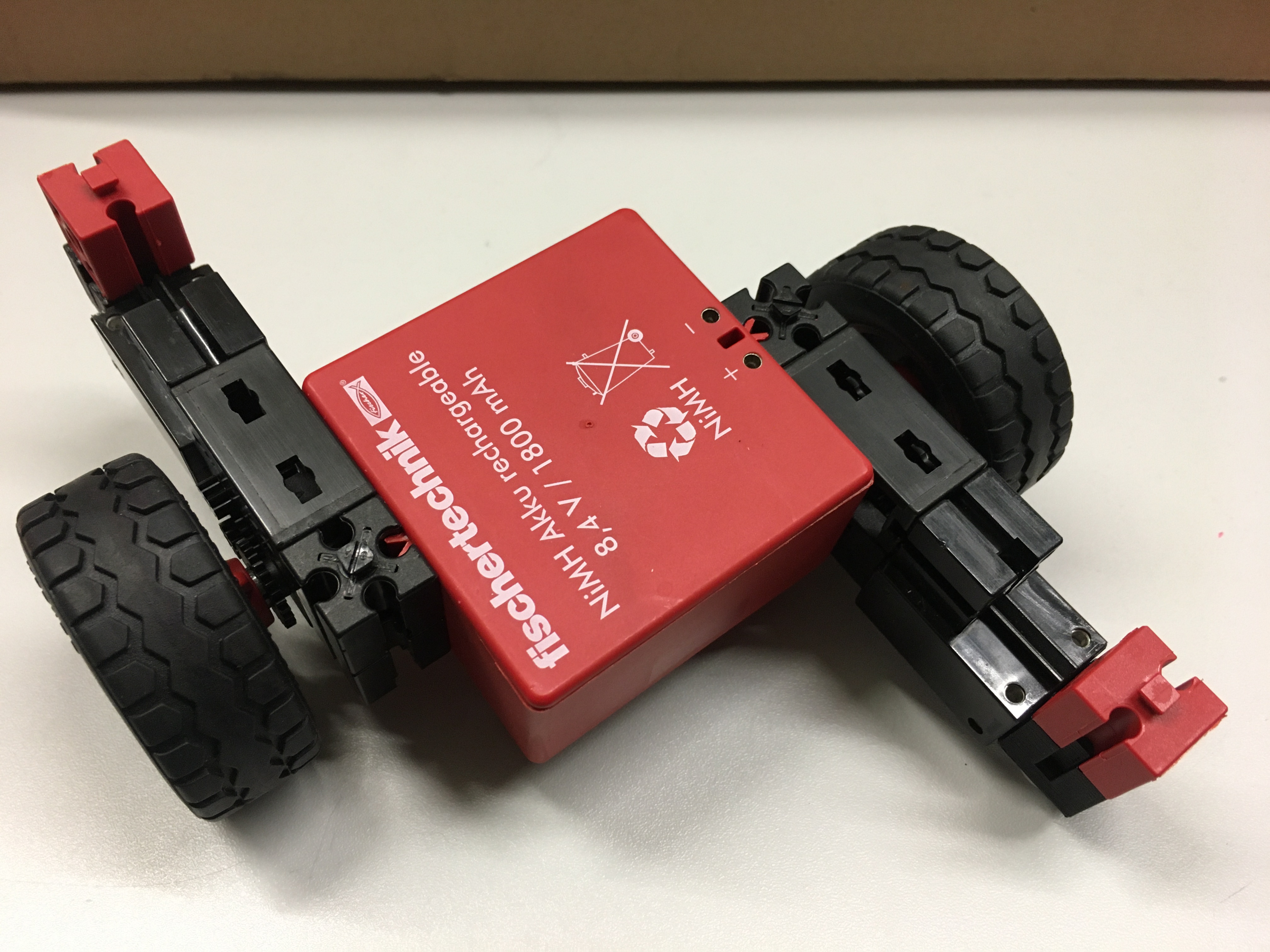
A.1- Motor
| Advantages: |
Disadvantages: |
| Supply a
sufficient amount of torque to move the car. |
Different performance between
motors that can generate (Momentum) at certain point, which
cause a deviation from the front road. |
|
|
Cannot
generate high rotation speed |
| |
|
| |
|
| |
|
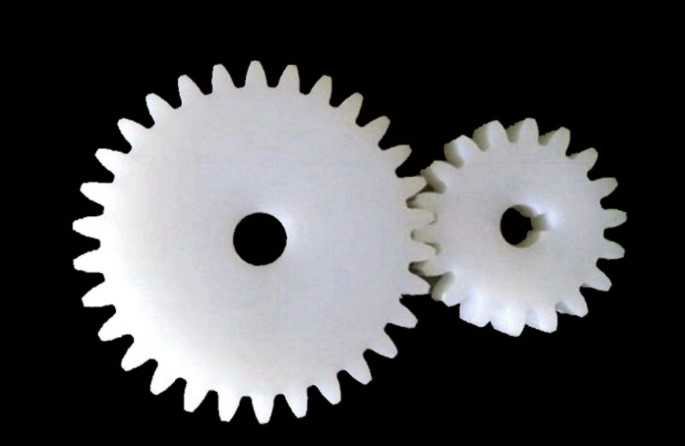
A.2- Gears
| Advantages: |
Disadvantages: |
| Low noise
design. |
Distance between gears generates a
random sliding which changes the car direction. |
| |
|
| |
|
| |
|
| |
|
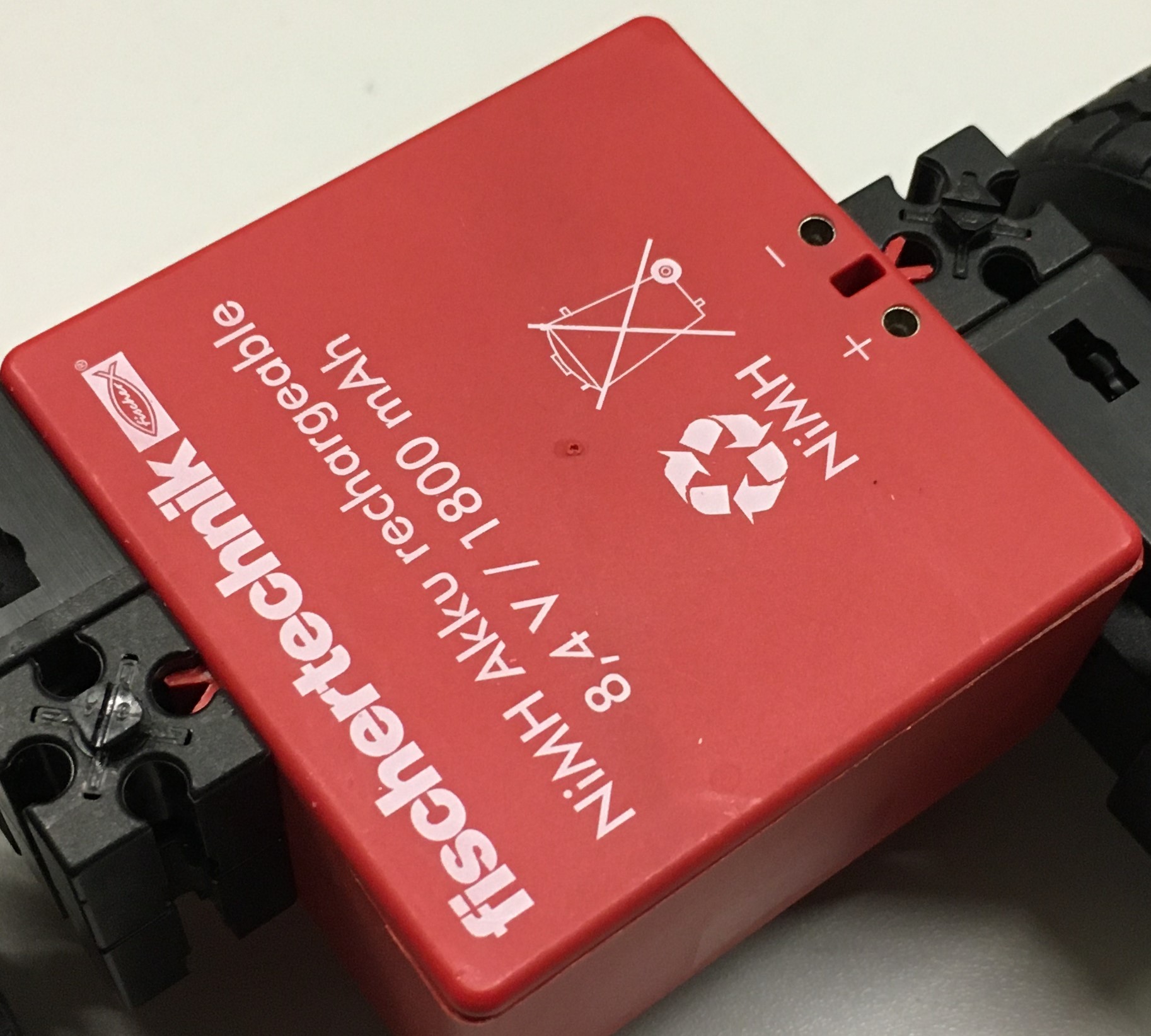
B.1- Motion Battery
| Advantages: |
Disadvantages: |
| Support the
car stability: |
Females pins
are bigger than the male wires which cause sometimes a
looseness. |
| construct the
main weight that keep the gravity point close to the water
surface. |
|
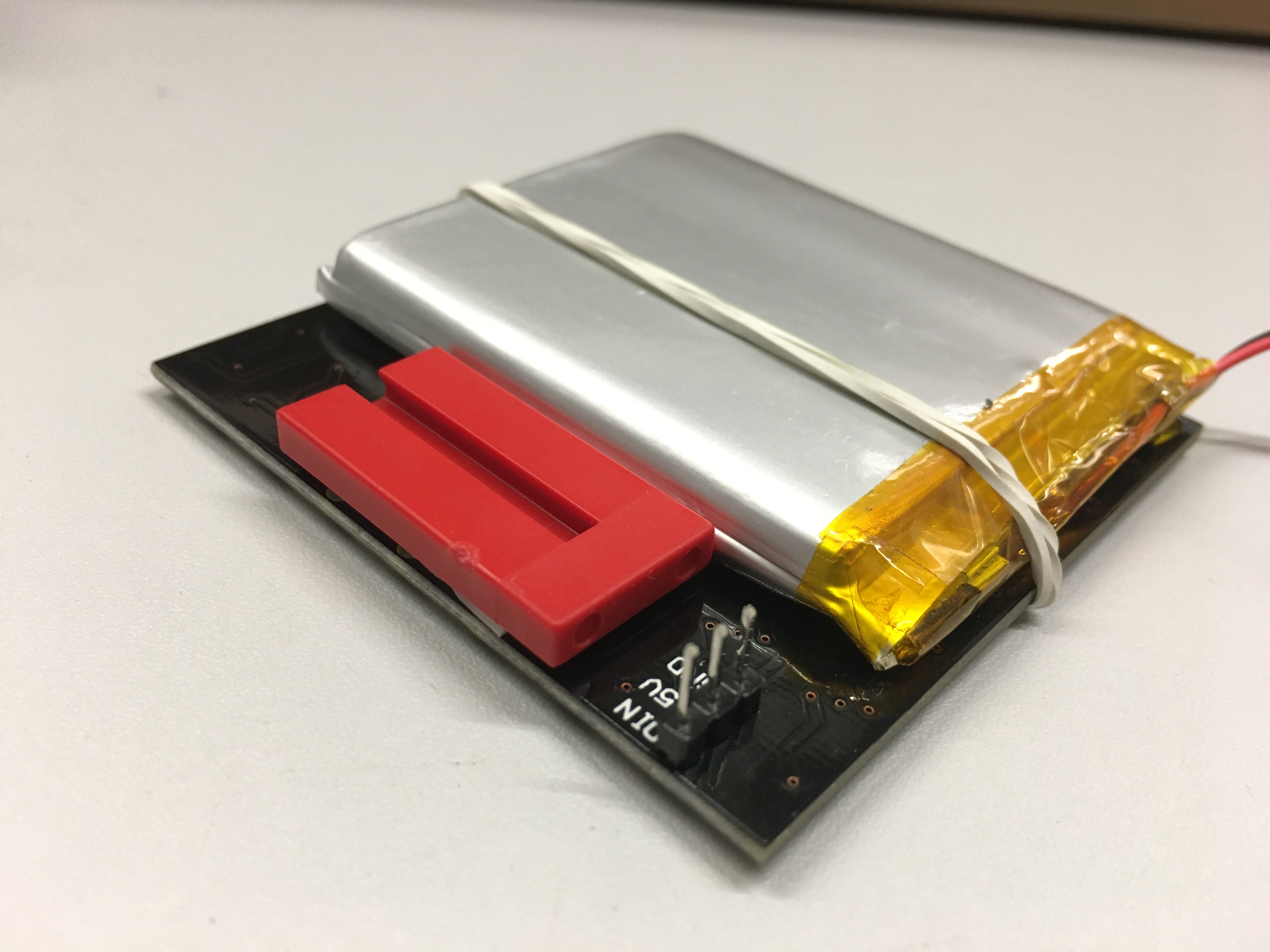
B.2- Lights Battery
| Advantages: |
Disadvantages: |
| Rechargeable. |
Fast discharge |
| |
Misbalanced
Assembly. |
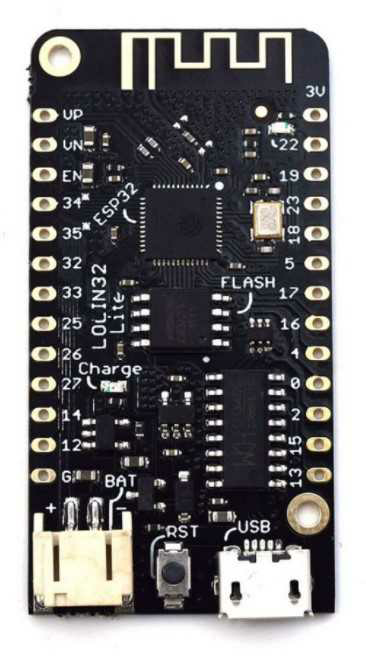
C.1- ESP 32 Lolin
| Advantages: |
Disadvantages: |
| Can charge the
LED battery via its USB port. |
Placement far
from the battery generated stretching/cutting of cables). |
| Adequate cost. |
Difficult to
assemble conveniently on the car. |
| G Sub-Function: Data transmit
|
G.1 - Wi-Fi

| Advantages: |
Disadvantages: |
| It allows long range communication between devices. Therefore, user can control their devices at anywhere of the world. |
If there is no internet connection, user cannot get the information . |
| |
|
| |
|
| |
|
| |
|
|