 Der
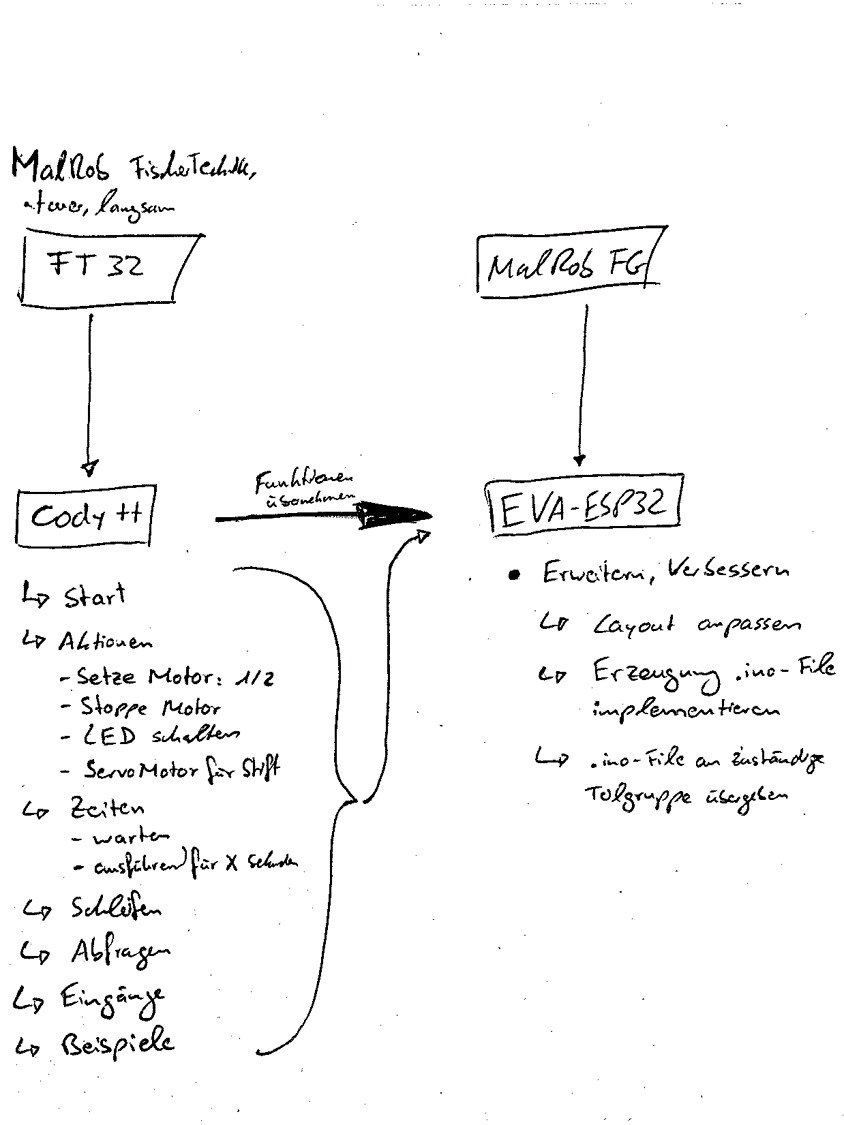
uController im MalRob von Fischer Technik wird mit der WebApp Cody++
programmiert. Diese beinhaltet die wesentlichen Funktionen zur
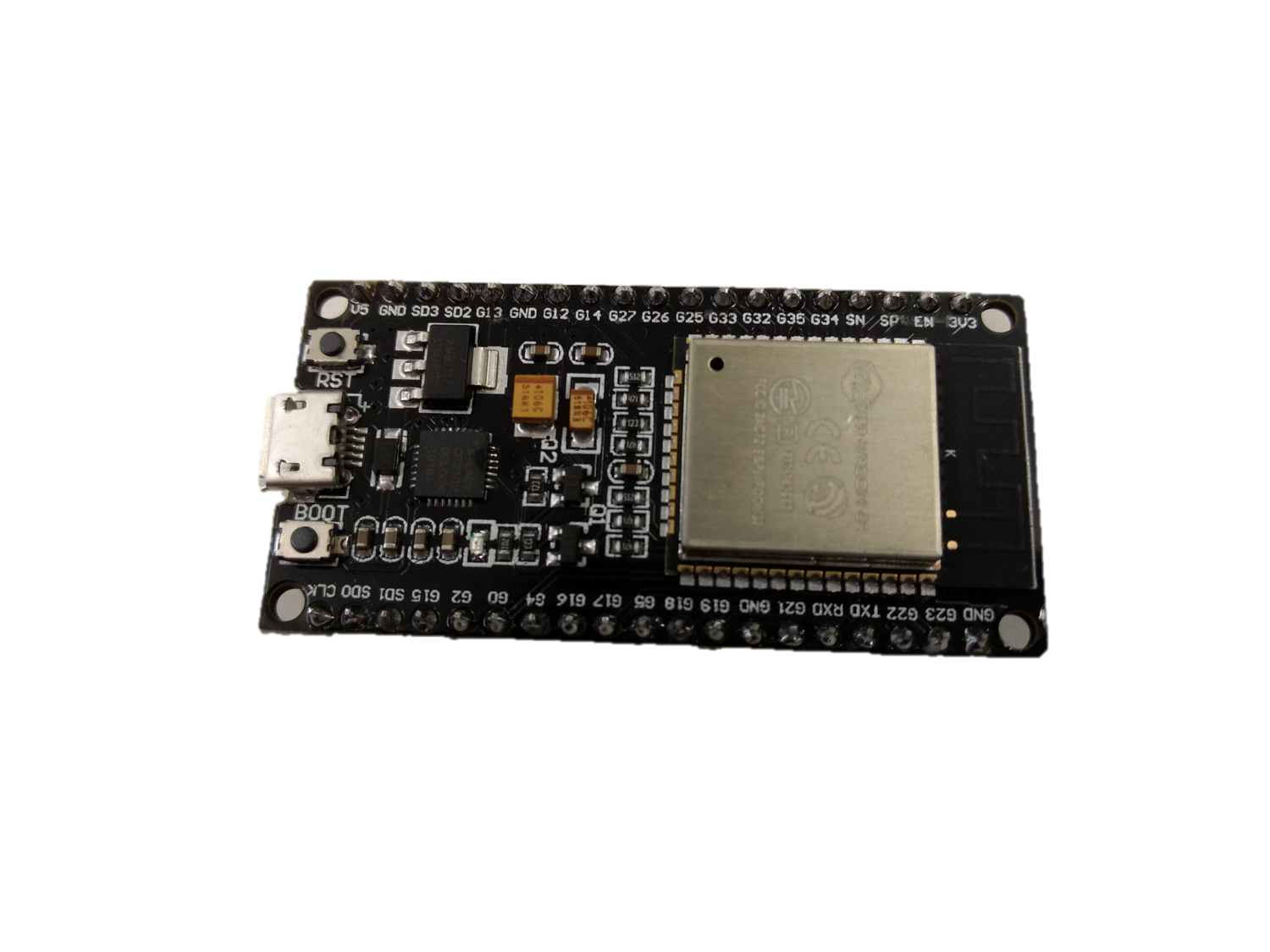
Ansteuerung der Roboter-Komponenten. Aus Kosten-/ und
Performance-Gründen wird beim neuen MalRob-FG ein ESP32 (siehe Abb.
links) eingesetzt, welcher nicht mit Cody++ bedient werden kann.
Analog zum FT32 beziehungsweise Cody++ soll die Software EVA-ESP32
für den MalRob-FG weiterentwickelt werden. Der
uController im MalRob von Fischer Technik wird mit der WebApp Cody++
programmiert. Diese beinhaltet die wesentlichen Funktionen zur
Ansteuerung der Roboter-Komponenten. Aus Kosten-/ und
Performance-Gründen wird beim neuen MalRob-FG ein ESP32 (siehe Abb.
links) eingesetzt, welcher nicht mit Cody++ bedient werden kann.
Analog zum FT32 beziehungsweise Cody++ soll die Software EVA-ESP32
für den MalRob-FG weiterentwickelt werden.
 Es
werden die Hauptfunktionen, die für das Steuern des MalRob benötigt
werden, implementiert. Es
werden die Hauptfunktionen, die für das Steuern des MalRob benötigt
werden, implementiert.
Weiterhin soll der fertige Code als
.ino-File zur Verfügung gestellt werden.
Dieses wird dann von
einer weiteren Projektgruppe übernommen und auf den ESP32 geladen.
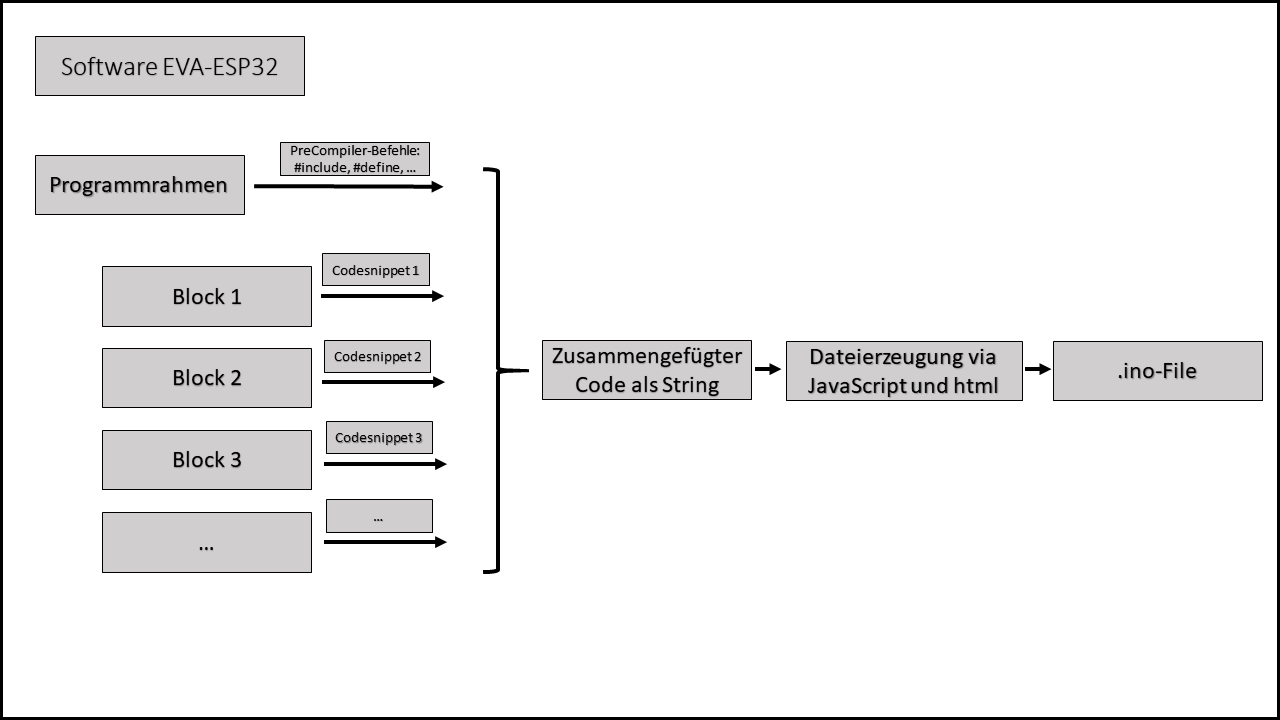
Der Code selbst wird durch das Aneinanderhängen von
Programmblöcken erzeugt.
Den Rahmen eines jeden Programms bildet ein
Startblock. Hier werden notwendige allgemeine Befehle hinterlegt.
Für die Arduino-Programmiersprache sind das die setup()-
und die loop()-Funktion.
Jeder weitere per Drap&Drop platzierte Block bringt seinen Code in den
Gesamtablauf mit ein. Im Hintergrund entsteht so ein Programmcode,
welcher im ersten Schritt als String-Variable gespeichert wird.
Hieraus wird dann ein .ino-File zur weiteren Verwendung generiert.
|