Kontroller Möglichkeiten
PID
,,Ein PID-Regler
berechnet einen" Fehler "-Wert als Differenz zwischen einem
gemessenen [Eingang] und einem gewünschten Sollwert. Der Regler
versucht, den Fehler zu minimieren, indem er [einen Ausgang]
anpasst.
Für Arduino gibt es ein specifische
,,Library” mit Funktionen um diesen Kontroller zu implementieren:
https://playground.arduino.cc/Code/PIDLibrary
Es gibt 3 Tuning-Parameter: Kp, Ki & Kd. Wenn Sie diese Werte
einstellen, ändert sich die Einstellung der Ausgabe. Schnell?
Langsam?
PID Autotune Bibliothek hilft, diese Parameter zu
bestimmen:
https://playground.arduino.cc/Code/PIDAutotuneLibrary
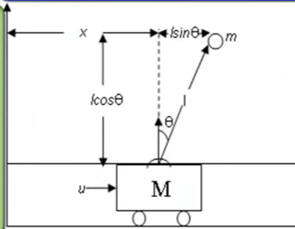
NEURONALEN REGELUNG
Diese Möglichkeit
beinhaltet einen Gesamtregler um ein inverses Pendel zu regeln. Als
neuronales Netz wird verwendet:
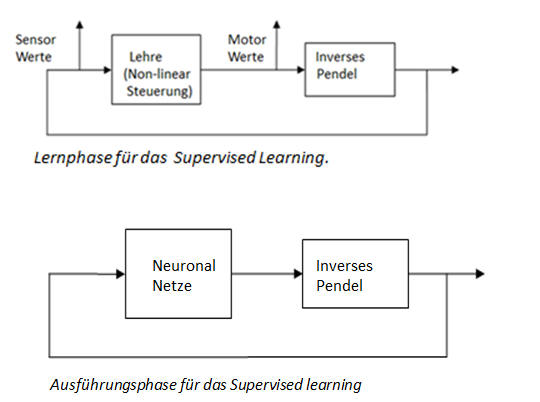
Diese Lösung enthält zwei Phasen, die Lernphase und die
Ausführungsphase.
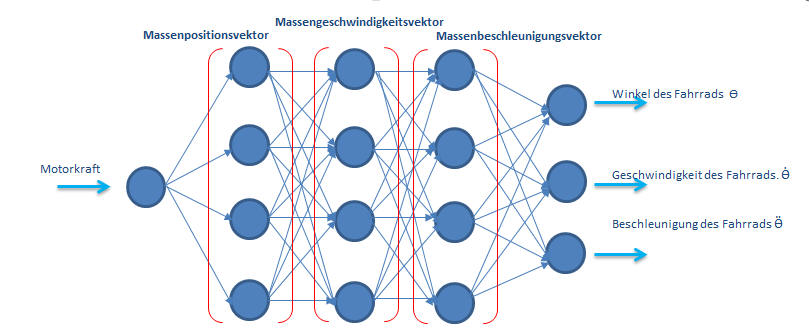
Wir haben eine Eingang:
-Der Motorkraft
Und bekommen wir die Ausgänge:
-Winkel des Fahrrads
-Geswindigkeit des Fahrrad
-Beschleunigung des Fahrrad
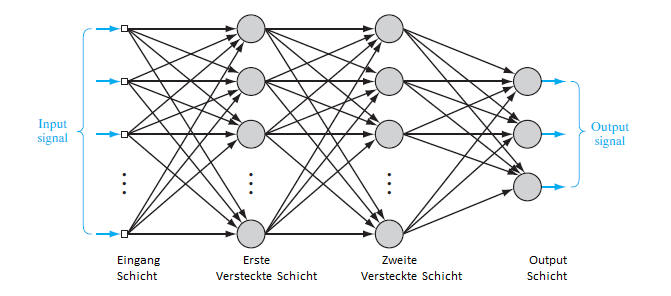
So bekommen wir die folgende Topologie des Neuronal Netzes, FFN
multivariable:
Das Ziel des neuronalen Netzes ist es, das Kontrollgesetz des
Lehrers nachzuahmen. In der Ausführungsphase wird die neuronale
Steuerung durch den Austausch des Lehrers getestet, hier wäre das
Hauptproblem, die Methode zu bestimmen, um das Netzwerk zu
trainieren, um den Ausführungsprozess zu erhalten.
Neuroduino: Eine künstliche neuronale
Netzwerkbibliothek für Arduino.
Neuroduino ist zweistufiges Perceptron-Netzwerk mit einer
vereinfachten API, die für Arduino-Projekte geeignet ist, die ein
Eingangsmuster flexibel mit einem Ausgangsmuster verknüpfen müssen.
Beispiel verwendet:
• Einfache Clustering und Klassifizierung
• ,,Natürliche" Sprache Auftauchen
• Denkbar eine einfache Stabilisierung von Servos oder Motoren
|