Als Beispiel für die gewünschten Funktionen wird der Fischertechnik
"TXT Controller" verwendet.

Bild: Robotics TXT Controller - Fischertechnik
Der
"TXT-Controller" bietet unter anderem acht analoge/digitale I/Os,
vier digitale Counter, Outputs für vier Motoren, einen Infrarot
Sensor, Host- & Slave-USB und einen SD Katenslot. Außerdem bietet
der Controller ein TFT-Touch Display.
Weiterhin ist auf
GitHub eine Anleitung für einen "vereinfachten TXT-Contoller" zu
finden. Der FTDuino
bietet ebenfalls die Ansteuerung von bis zu
vier Motoren, vier Countern und acht analogen/digitalen I/Os. Jedoch
sind sämtliche externe Anschlüsse (USB, SD-Karte), Infrarot und das
Display nicht vogesehen. Das GitHub Repository zum FTDuino bietet
allerdings breit gefächerte Informationen zum Platinen-Layout und 3D Druck,
sowie der dazugehörigen Software.

Bild: FTDuino
Die Fahrzeug-Basis des
Projekts bildet das von der vorherigen Gruppe aufgebaute
Fischertechnik Fahrzeug. Die Steuerung des Fahrzeuges ist mit einem
ESP32 realisiert, die Programmierung der Fahrt erfolgt über Cody++.
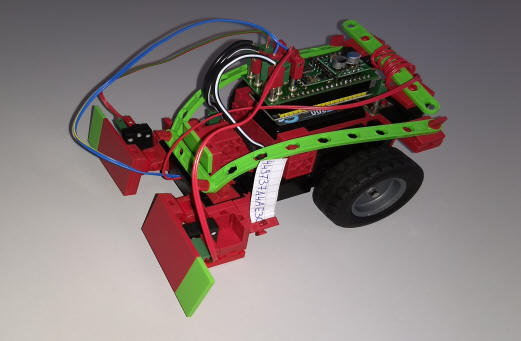
Bild: Fischertechnik-Fahrzeug mit ESP32
|