Als Software kommt beim TXT Controller ein von Fischertechnik
mitgeliefertes, quelloffenes embedded Linux zum Einsatz, von dem
auch eine Community Version mit erweitertem Funktionsumfang für
mehrere Hardwareplattformen existiert. Als Hardware kommen oft individuelle
Modifikationen aus der Makerszene zum Einsatz, wobei der Fokus hier
meist auf Arduino Lösungen liegt, seltener auch auf dem Raspberry
Pi.
Programmiert wird der TXT Controller derzeit über die
graphische Oberfläche ROBOPro von Fischertechnik. Alternativ kann
der Controller auch Remote über Bluethooth mit einer App gesteuert
werden.
Zur Zeit existiert keine Möglichkeit diesen oder
einen alternativen Controller über einen Webbrowser zu programmieren
oder zu steuern.
Bild: Aufgebauter Roboter - FT Discovery-Set
Quelle: https://spielzeugfamilie.de/91418-thickbox_default/2580640-fischertechnik-robotics-txt-discovery-set-310dlg.jpg
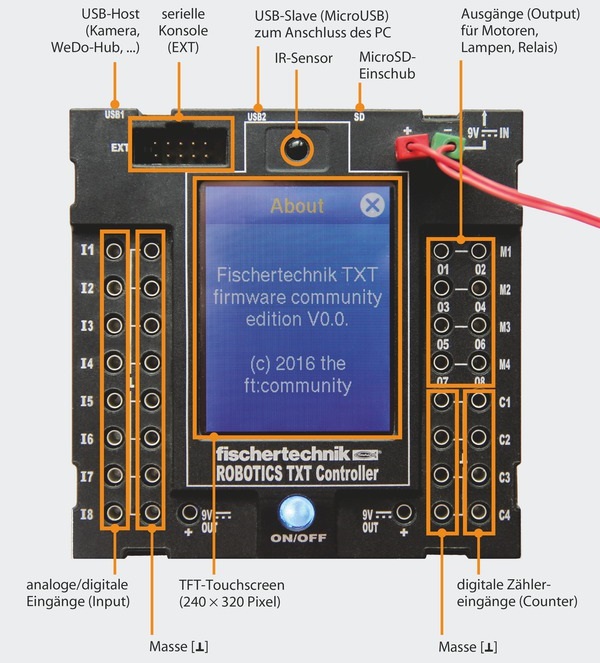
Bild: TXT-Controller mit den wichtigsten Aus-/Eingängen
Quelle: https://www.heise.de/ct/ausgabe/2016-12-Community-Firmware-bohrt-den-Robotics-TXT-Controller-auf-3211490.html
Um den ESP32 zu programmieren gibt es mehrere Möglichkeiten:
Den
klassischen Weg: Das Programm zu übersetzten und auf den Prozessor
zu flashen.
Oder alternativ: Einen Interpreter auf den Prozessor
zu laden und anschließend Skripte interpretrieren zu lassen.
Zum Einlernen in die ESP32-Programmierung wurde unter anderem ein
kleines Programm/Spiel erstellt welches digital einen Eingang nach
dem "Tastenzustand" abfagt und entsprechend eine Bewegung auf dem
Display ausgibt.
Der Quellcode kann hier eingesehen werden:

Download der .zip-Datei
Weitere Informationen zum Stand der Technik:
Stand der Technik - Hauptdokumentation
|