Das Ziel, dass sich die Projektgruppe der ConSALTing-Machine gesetzt
hat, einen Küchenhelfer zu entwickeln, der zuverlässig Kochwasser
für verschiedene Speisen mit Salz würzen kann, konnte zu sehr großen
Teilen erreicht werden. Als Ergebnis des Projekts kann die
Projektgruppe einen vollfunktionsfähigen Prototypen vorweisen,
dessen überzeugende Funktionalität auch in ersten Erprobungen unter
Beweis gestellt werden konnte.
Validierung der Funktionalität
Zwecks der Validierung der
Prozessgenauigkeit wurden Tests mit dem Prototyp der ConSALTing
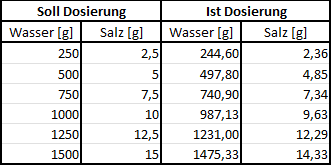
Machine durchgeführt. Hierzu wurde der Wassertank mit
unterschiedlichen Wassermengen in 250ml Schritten gefüllt und
anschließend nachgeprüft, welche Werte die Wasserwiegung ausgibt und
welche Salzmengen dazu dosiert werden:
Vergleich Soll/Ist-Dosierung
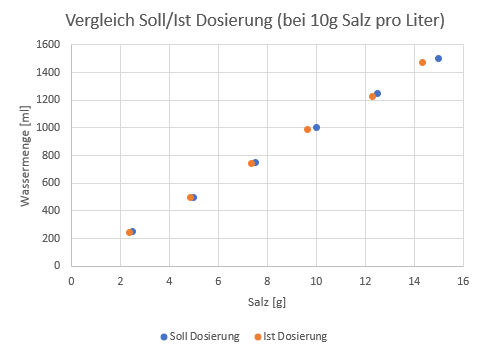
Vergleich Soll/Ist-Dosierung
Wie im obigen Schaubild gut zu sehen ist,
liegen Soll- und Ist-Werte der Dosierung sehr nah beieinander.
Die größte Abweichung erfolgt dabei bei einer Dosierung des Salzes
mit dem maximalen Wasserfüllstand von 1,5L. Hierbei weicht die
gemessene Wassermenge 25ml vom Soll-Wert ab, was einer Toleranz von
~1,6% entspricht. Das dazu dosierte Salz weicht vom
entsprechenden Soll-Wert 0,66g ab. Die Salz-Toleranz entspricht
damit ~4,4%.
Die auftretenden Ungenauigkeiten des Systems liegen
dabei in einem Bereich, der für die Anwendung als unbedenklich zu
bewerten ist. So liegen die prozentualen Abweichungen im niedrigen
einstelligen Bereich und beeinflussen somit die Qualität des
Kochwassers in nicht wahrnehmbaren Größenordnungen.
Aus der Erprobungsphase konnte erschlossen werden,
dass das Messprinzip verantwortlich für den größten Bestandteil der
Messungenauigkeit ist. Durch die Verwendung einer gemittelten
Messreihe, anstelle eines einzelnen ausgelesenen Messwerts der
Wägezelle, konnten jedoch der Fehler durch Relativbewegungen auf ein
zulässiges Niveau reduziert werden. Somit stellen lediglich größere
Absolutbewegungen, während der Messung, eine relevante Fehlerquelle
dar. Softwaretechnisch wurde mithilfe der mittleren Quadratischen
Abweichung zusätzlich eine Maximalabweichung von 10% des endgültigen
Messwerts festgelegt, um starken Schwankungen, durch beispielsweise
eine Absolutbewegung, vorzubeugen.
Validierung der Energieeffizienz
Im Hinblick auf die Energieeffizients konnte die Projektgruppe
ebenfalls wirksame Maßnahmen ergreifen, um das Gesamtsystem für
diesen Gesichtspunkt zu optimieren.
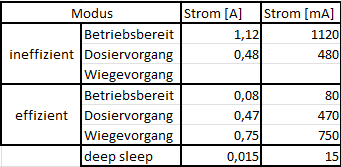
Um die Energieeffizienzmaßnahmen genauer zu validieren wurden zwei
unterschiedliche Softwareversionen der Targetanwendung programmiert.
Die normale, effiziente und eine möglichst energieineefiziente
Version, in der die oben genannten Aspekte zu Energiesparung nicht
berücksichtigt bzw. umgesetzt wurden.
Auf der Grundlage dieser beiden SW-Versionen wurden Messungen
durchgeführt, die den Energieverbrauch aufweisen.
Im Anschluss daran wurden Rechnungen zur daraus
resultierenden Lebensdauer durchgeführt:
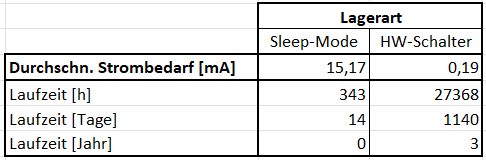
Basierend von Messungen und Hochrechnungen, für die verschiedenen
Lagerungsarten, hat sich eine Differenzen in der Nutzungsdauer von
mehreren Jahren ergeben. Während die Akkulaufzeit der Anwendung mit
Verwendung des Deep-Sleep-Modus des Lolin 32 circa 14 Tagen
entspricht, kann die Variante mit Ausschalter auf bis zu drei Jahren
kommen (es handelt sich hierbei um Hochrechnungen unter idealen
Bedingungen. Effekte wie beispielsweise Selbstentladung werden nicht
berücksichtigt. Da es sich um eine vergleichende Relativbetrachtung
handelt, sind solche Vernachlässigungen anwendbar. Die
Lebensdauerberechnung geht dabei von vier Verwendungszyklen pro
Woche aus, wobei ein Zyklus drei Minuten lang geht).
In Summe führen die ergriffenen Maßnahmen dabei zu
einer geeigneten Laufzeit des Gesamtsystems und zu einem möglichst
energieeffizienten Betrieb. Das größte Einsparpotential im
optimierten Modus resultiert dabei aus der Vermeidung des
Haltestroms des Schrittmotors.
|