Als Konzept haben wir uns dazu entschieden den Aufbau der vorherigen
Gruppe zu erweitern. Die Taster (Bump Senoren) werden hierbei
angewinkelt an der Vorderseite des MalRob angebracht. Dadurch soll
eine optimale Fahrbewegung parallel zu den Wänden geschaffen werden.
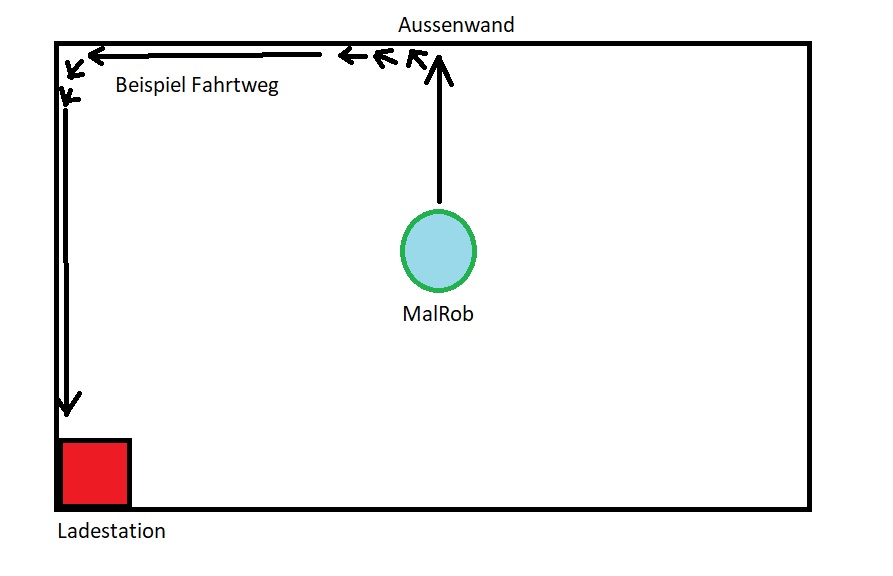
Der Roboter fährt dann auch bei uns im "Kreis" die Wand entlang bis
er die Ladestation erreicht.
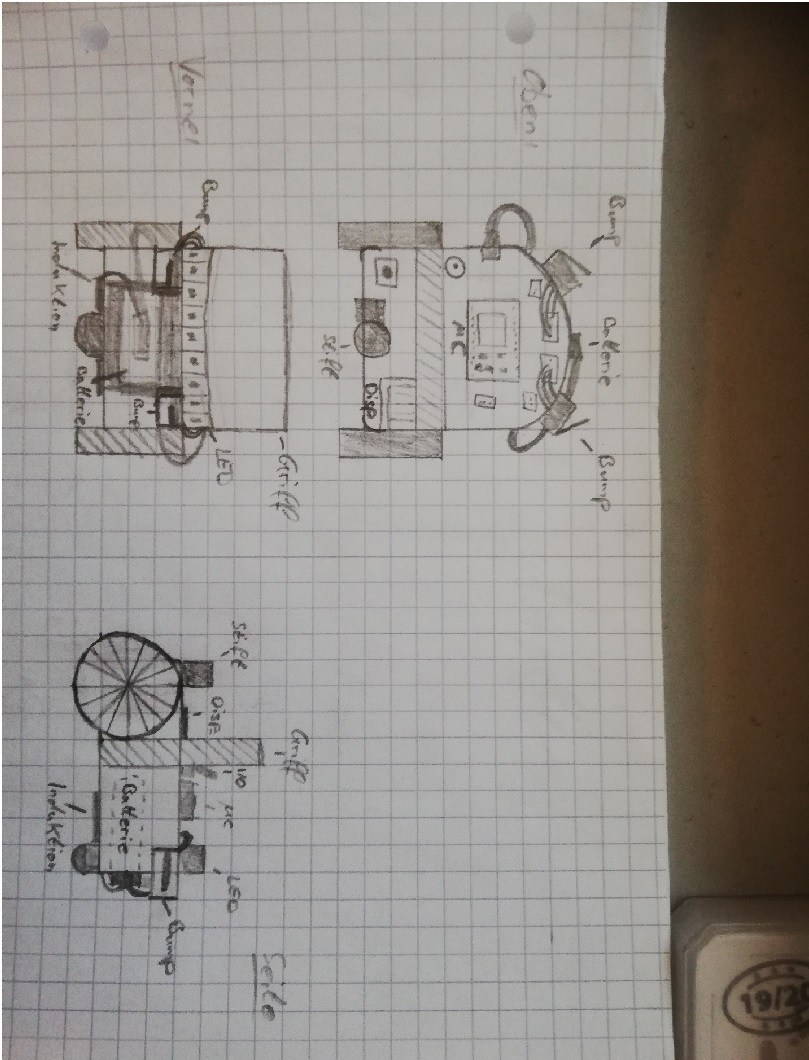
Zur
gleichmäßigen Fortbewegung wurde das Modell mit Schrittmotoren
anstatt DC Motoren gewählt.
 |