First of all, the robot have to be able to go to the base
station when its battery is low. Since we cannot directly detect the
battery level of the powerbank, we decided to set a timer for the
robot to go find the base station. We will set a timer in the coding
of the robot, that will make the robot go find the base station
after several hours it is on.
In order to ensure the eMalRob can do wireless charging at the base
station, those component will be implement on the robot;
1.
IR Sensor (Receiver) - to detect the base station.
2.
Bump sensor - to detect wall in front
of the robot.
3. Inductive Charging Receiver - to enable
wireless charging.
.png)
Draft of
the concept
Below is the position of the sensor concept.
The final position of the sensor may differ from the concept during
implementation.
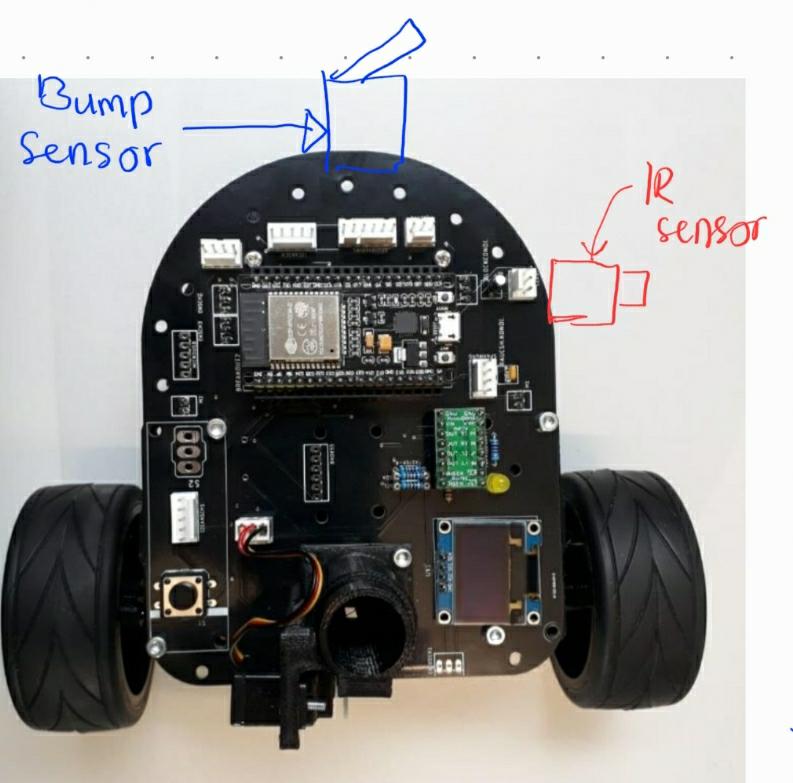
Position of the sensor and circuit
The base station will be
placed in the corner of the wall,
|