Bump Sensor
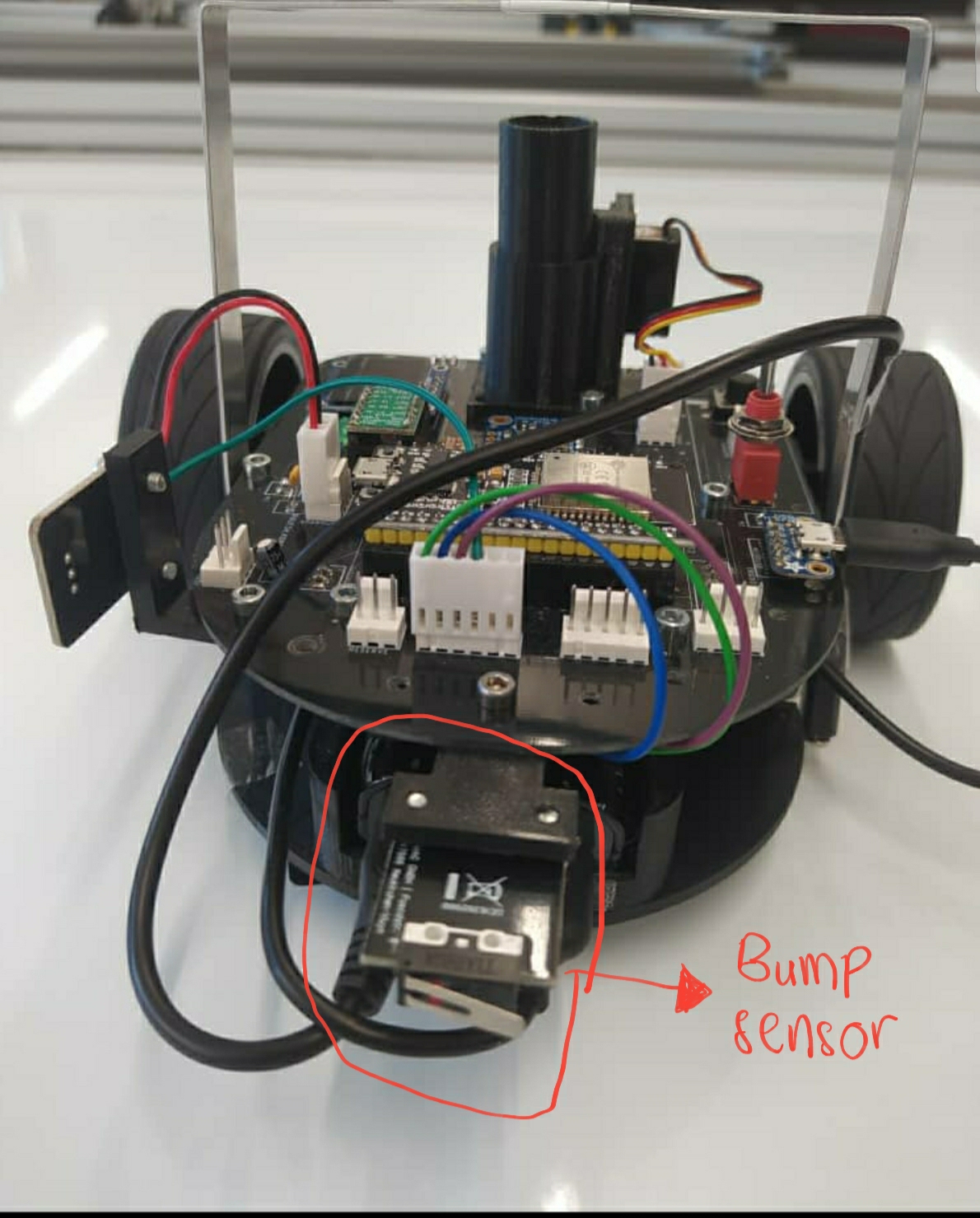
Bump sensor is attached at the front of the
eMalrob. the robot will move forward until it bump into any obstacle
or wall at the front of it. After that, it will turn 90 degrees to
the left. The condition will continue until the robot detect IR
signal at the base station
IR Receiver Sensor
.jpeg)
IR Receiver Sensor is attached at the right side
of the robot. When it receive IR signal at the base station, it will
stop and robot will start charging.
Final
look of eMalrob
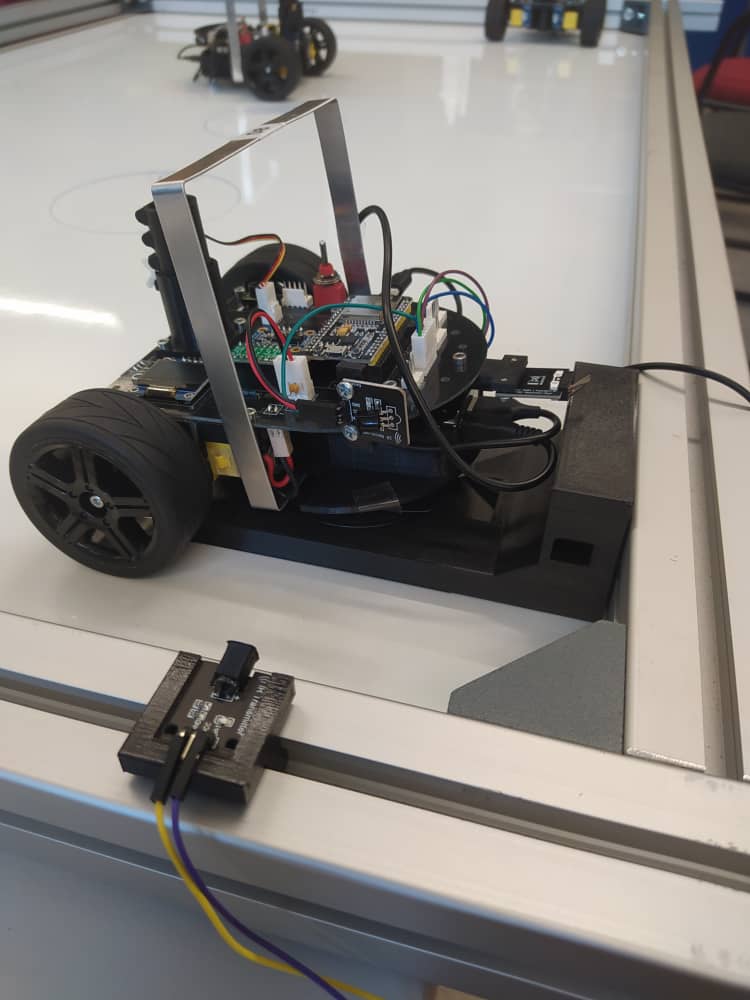
Picture above shows when the eMalrob arrived at the base station and
start charging by itself.
Betreut durch:
- Gruppennummer -
- Namen - |