Gesamtprojekt
Die Motoren des aktuellen Fischertechnik-Malroboters werden mit einer
9V-Spannungsversorgung betrieben. Hierfür wird der Baustein
4990
Dual Motor Driver eingesetzt. Des Weiteren wird der Malroboter über
einen vorgegebenen Code in Cody++ gesteuert. Hierbei werden über
bestimmte Bausteine in Cody++ softwareseitig eine definierte
Fahrstrecke vorgegeben, welche anschließend von dem Malroboter
abgefahren wird. Der eigen entwickelte Malroboter wird mit einer
5V-Spannungsversorgung betrieben. Die benötigte Hardware ist zum
Großteil aufgebaut, wobei Kleinigkeiten (wie z.B. der Startschalter
oder der Winkelsensor)
noch fehlen. Cody ++ ist mit dem eigen entwickelten Malrobotor noch
nicht kompatibel.
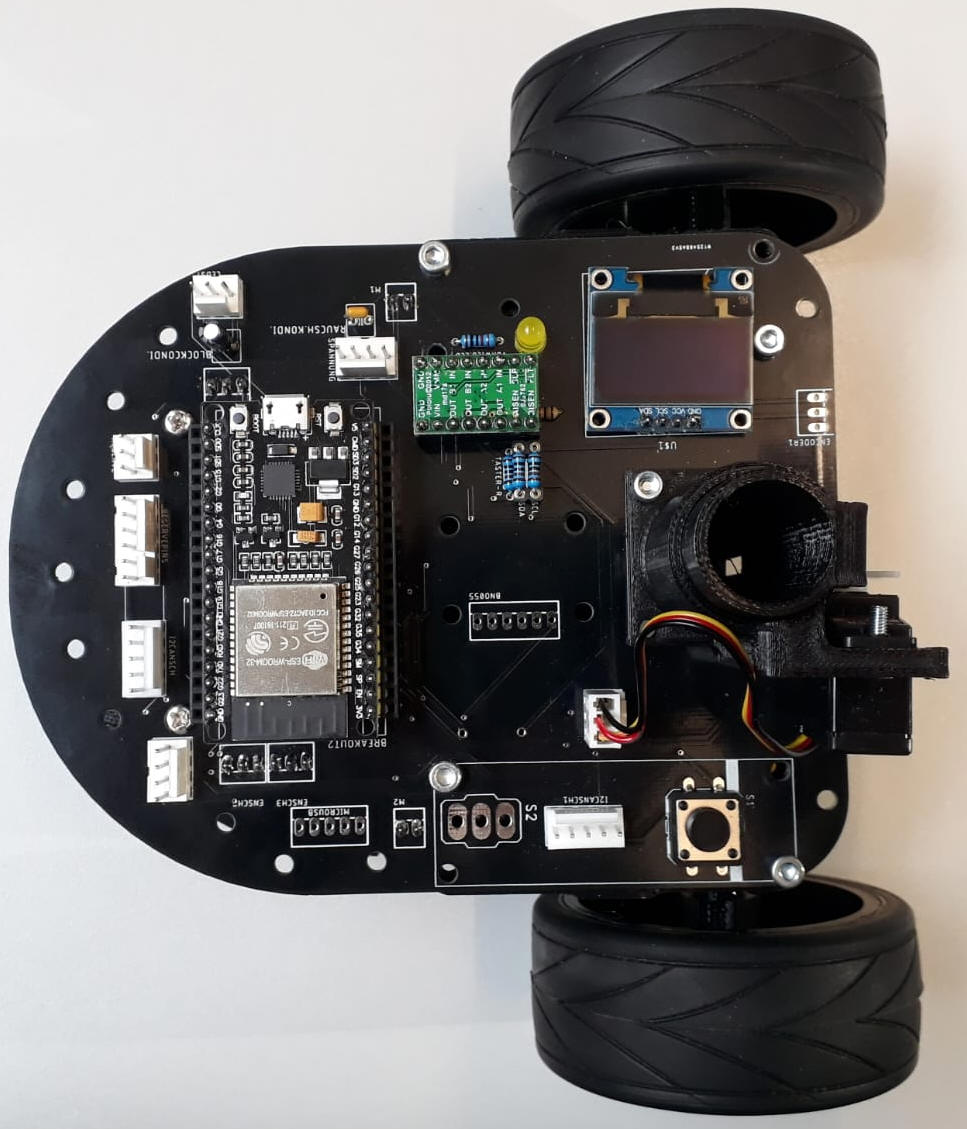
Abbildung: eigen entwickelter Malroboter |