Die Projektarbeit besteht aus 2 Teams zum einen Herrn Heinzmann, der
sich um die Bildverarbeitung kümmert und zum anderen Herr Glaser und
Herr Kuttler die sich um die Entwicklung der Drohne kümmern.
Kurzfassung der Aufgabenstellungen:
Bildverarbeitung (Heinzmann):
Mapping der Umgebung mit
Hilfe einer Stereo-Kamera und ROS
Entwicklung der Drohne
(Glaser & Kuttler):
Aufbau und Entwicklung einer
Drohne die über eine Hindernisserkennung verfügt und sich mit hilfe
eines Computer steuern lässt an den auch das Kamerabild übertragen
wird. Desweitern soll die Drohne anhand von GPS-Daten Autonom
fliegen können.
Aufgabenstellung
(Download)
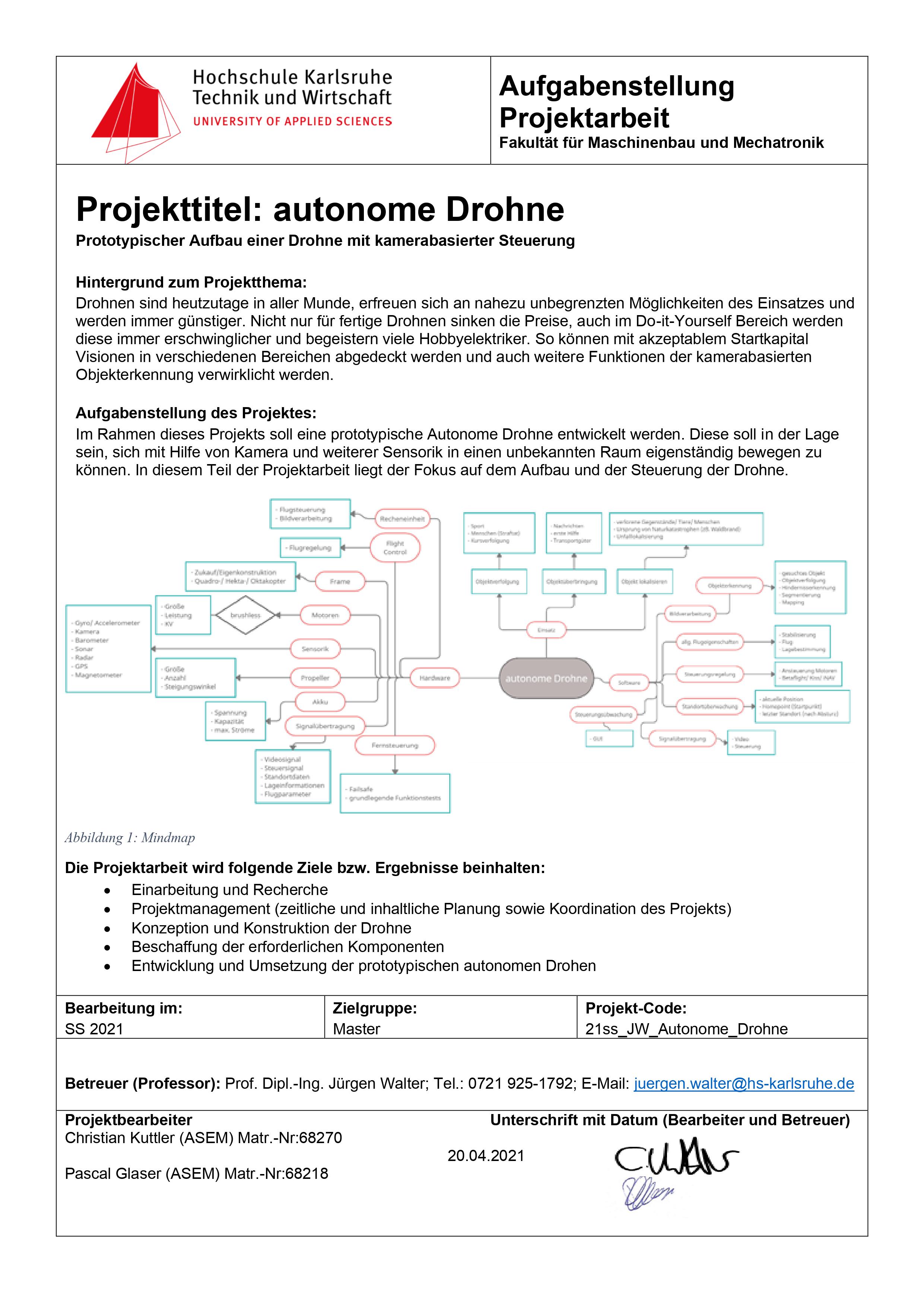
Abbildung 1: Aufgabenstellung
- |