In der ersten Entwicklungsphase haben wir uns zunächst um den Frame
der Drohne gekümmert, wir haben uns hierbei für eine 5- inch
FPV-Frame entschieden. Dazu haben wir ein passendes CAD-Modell
gesucht und sind auf
Github fündig
geworden.

Abbildung 1: 5-Inch Quad-Frame
(Bildquelle:
https://github.com/tbs-trappy/source_one)
Auf Basis dieses Modell sollte unsere Drohne entstehen. Mit hilfe
von Creo Paramatrix haben wir die für uns nötigen Änderungen an dem
Modell vorgenommen.
Abbildung 2:
Angepasstes CAD-Modell des Frames
Und anschließend mit
Hilfe des 3D-Drucker mit verschiedenen Filamenten und verschiedenen
Druckeinstellungen gedruckt.
Letztendlich haben wir uns bei dem
Filament für ABS entschieden. Da dieses Material am wenigsten
verfomungen unter Belatung aufwies.

Abbildung 3:
3-D-Druck der Drohenen-Frames
Nun wurde die Drohen zum
ersten mal zusammengebaut mt denr im vorhinein ausgewählten
Komponenten.

Abbildung 4: Erster Prototyp der Drohne
Die Drohne war bereit für
die ersten Testflüge.
Leider erwies sich das ausgewählte
Material des Frames der Drohne (ABS) nicht für sehr stabil. Es
hatte gute Flugeigenschaften, da sich die Arme kaum bogen in der
Luft. Allerdings verzeihte dieses Material keine unsanften Landungen
und es mussten nach jeder Langung die Arme ausgetauscht werden.
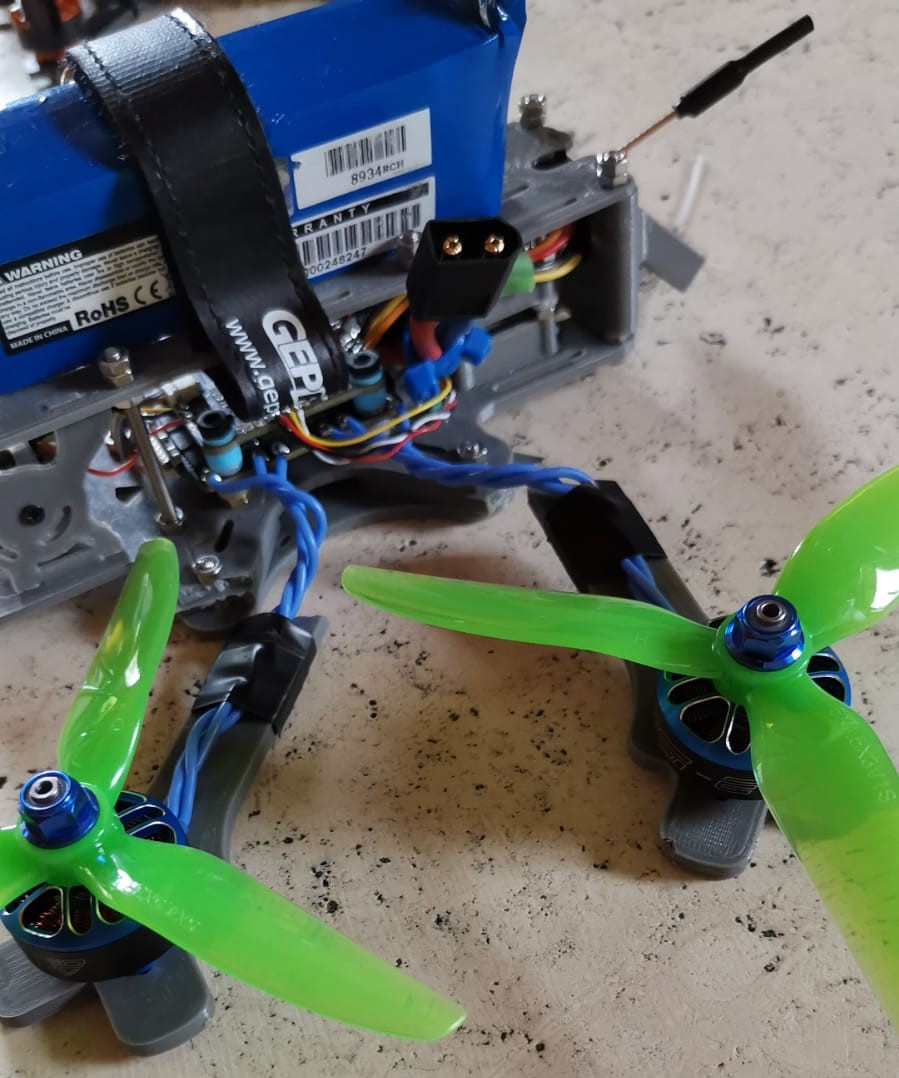
Abbildung 5:
Unsanfte Landungen der Drohne
Aufgurnd der häufigen
Reperaturarbeiten beschlossen wir einen Frame aus
Kohlefaser zukaufen.
Und bauten die Komponenten in den neuen
Rahmen ein.
.jpeg)
Abbildung 6: EInbau der Motoren und des ESC
Anschließend stand
das Grundgerüst unserer Drohne und war bereit für erste Testflüge.
.jpeg) 
Abbildung 7: Fertiges Grundgerüst der Drohne und Testflug der Drohne
Die Drohne wurde anschließend mit der ausgewählte Sensorik und
Microcontroller ergänzt, sodass Sie die weiteren Aufgaben
bewerkstelligen kann. Dabei ist der ESP32 für die Verbindung mit dem
Computer zur Bildübertragung und zur Steuerung über den PC. Der
Arduino übernimmt das Senden der Steuerungsbefehle an den
Flugcontoller über ein PPM-Signal und fragt mithilfe der
Ultraschallsensoren die Entfernung zu den Gegenständen. Kommt ein
Gegenstand zu Nahe, leitet der Arduino ein Ausweichmanöver ein. Der
Arduino und der ESP32 kommunizieren über I²C.
.jpeg) .jpeg)
Abbildung 8: Drohne mit Sensorik und Microcontroller ausgerüstet
|