In der Vergangenheit gab es bereits mehrere Projekte, in denen die
Entwicklung des Malroboters "eMalRob" vorangetrieben wurde.
Inzwischen kann der Roboter mit der graphischen Programmiersprache
Cody++ per WLAN-Remotezugriff aus einer Webanwendung auf einem PC
programmiert werden, anschließend werden die Befehle durch einen
ESP32-Mikrocontroller umgesetzt.
Der Roboter besitzt zwei Räder,
die durch Motoren angetrieben werden, eine Kugel dient zur Abstützung.
Die Stiftehalterung lässt sich durch einen Servo anheben und
absenken. Auf diese Weise können Dinge auf der Ebene gemalt oder
gezeichnet werden.
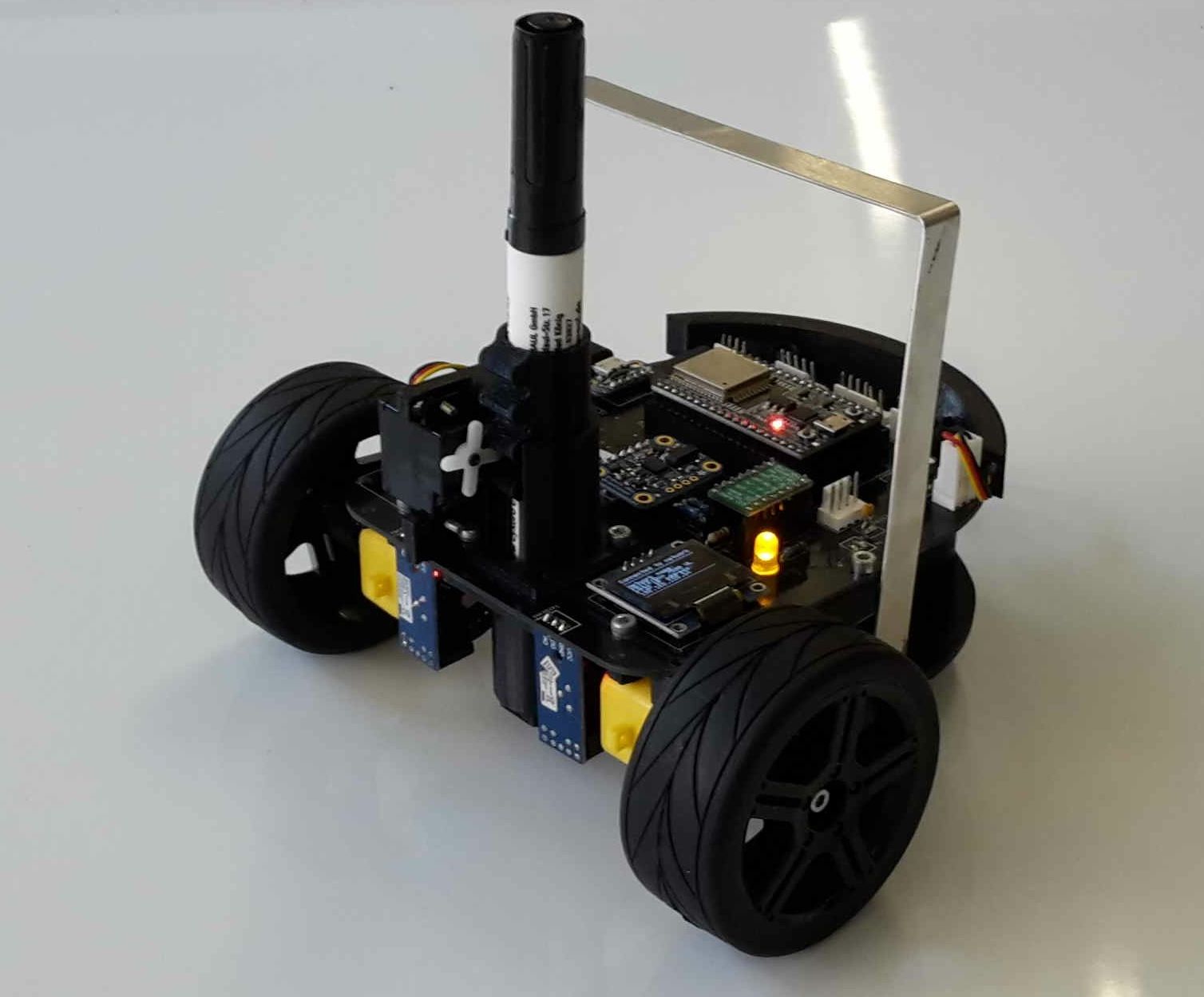
Zusätzlich sind folgende elektrische
Komponenten auf dem Roboter enthalten:
--> OLED-Display zur
Anzeige der IP-Adresse
--> 5V Powerbank zur
Stromversorgung
Zu Beginn wurden alle Bewegungen des Roboters
durch Zeiten festgelegt. Da zwei Motoren niemals die exakt gleichen
Reibungsmomente oder Drehmomente aufweisen, führt diese Vorgehensweise dazu, dass
sich die Motoren unterschiedlich schnell drehen, wodurch der
Mal-Roboter statt einer geraden Strecke eine Kurve fährt. Aus diesem
Grund wurden bereits
in einem vorausgehenden Projekt Encoder an den Getriebemotoren
befestigt, die durch Lichtschranken arbeiten. Dabei rotiert an jedem
Motor eine Lochscheibe in einer Lichtschranke, sodass die Drehung
der Räder gemessen werden kann. Nun können beide Motoren geregelt
werden, sodass der gewünschte Weg des Mal-Roboters präziser
abgefahren wird.
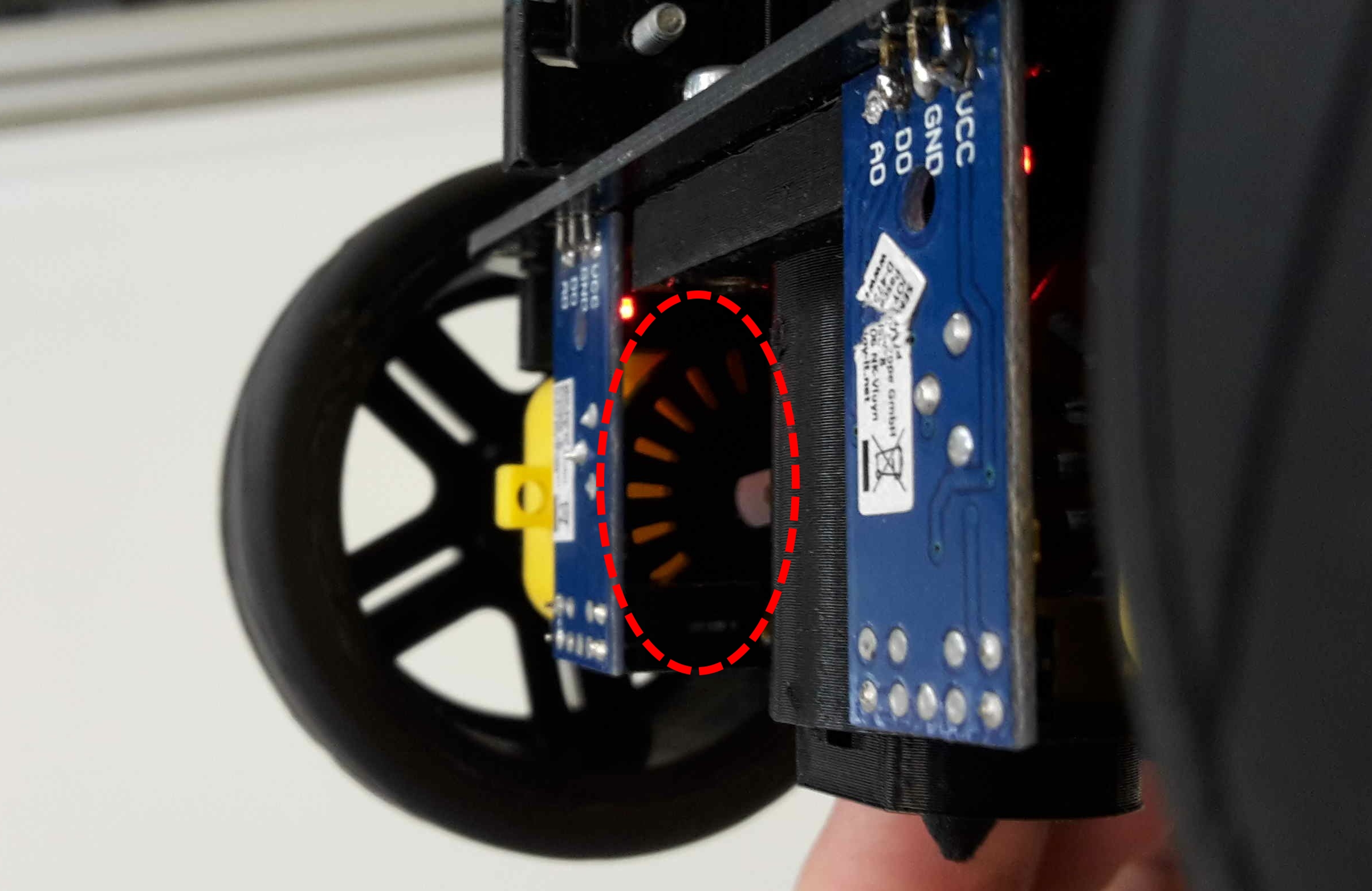
Abbildung: Encoder-Lichtschranke |