Die Grundidee ist die Integration eines energieeffizienten Lolin32 in
den freien Bauraum im Inneren des Pedals. Gesteuert vom Lolin32 soll
dann ein Schrittmotor eine Winde antreiben, um das Seil aufzurollen.
Das Abrollen des Seils soll mit minimalem mechanischen Widerstand
erfolgen. Dazu wird ein mechanischer Freilauf zwischen
Winde und Motorausgangswelle eingesetzt.
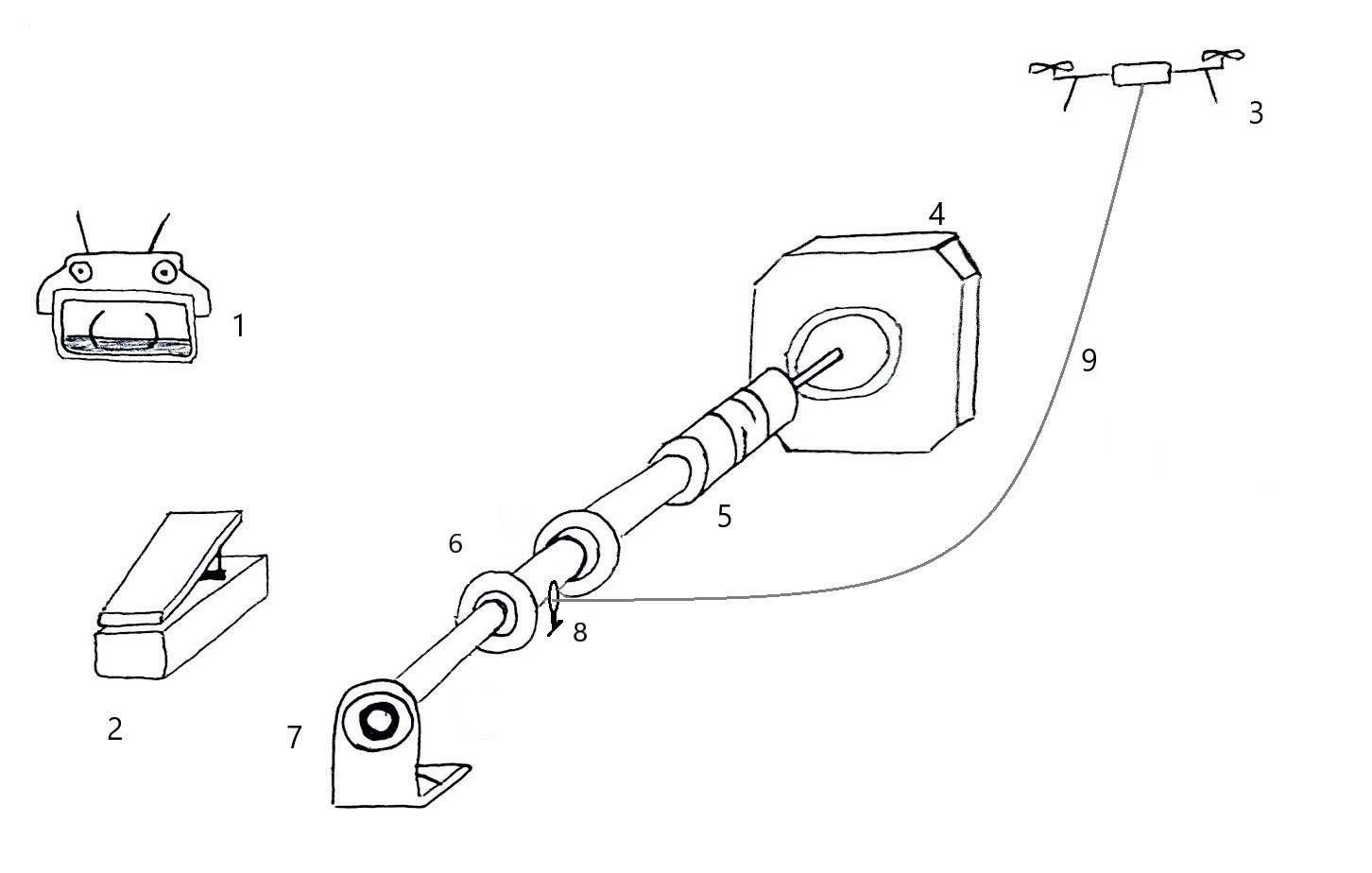
Abb.: Detaillierte Darstellung Projektskizze
1: Fernsteuerung
mit Smartphone als Display
2: Pedal mit Mikrocontroller und
Motortreiber integriert
3: Drohne MAVIC 2 mit Landegestellerweiterung
4: Schrittmotor
5: Kupplung
6: Seilwinde auf Hülsenfreilauf montiert
7:
Wellenlager (Kugellager) mit Lagerbock als 3D Druckteil
8:
Öse
|