|
Versuche zum BNO055
In den folgenden Versuchen
wurde eine Eignung des BNO055 Sensors für den Drohnenbetrieb
untersucht. Zu allen Versuchen lagen je 2000 Messwerte zugrunde die
mit einer Frequenz von 100Hz abgetastet wurden. Die
Umgebungsbedinungen waren konstant und haben sich bei den jeweiligen
Messungen nicht verändert. Der verwendete Treiber wurde von Adafruit
bezogen und besitzt für die Beschleunigungsdaten eine Auflösung
beträgt 0,01 und für die Orientierungswinkel eine Auflösung von
0,0001(wird jedoch nicht verwendet).
Statischer Test mit dem Bosch BNO055
Versuchsbeschreibung
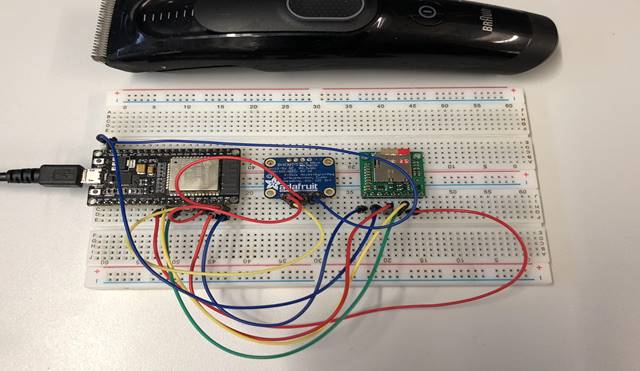
Hier wurde ein statischer
Test in einer definierten Lage durchgeführt. Hierfür wurde das
Steckbrett auf einem Tisch platziert und während der Messung wurde
darauf geachtet, dass sich das Steckbrett nicht bewegt.
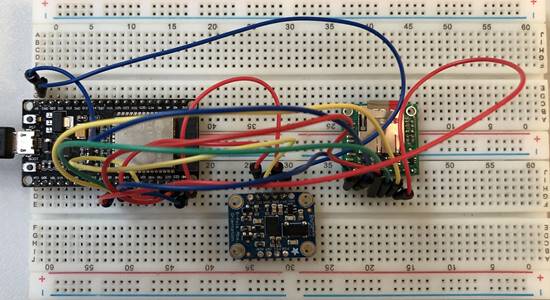
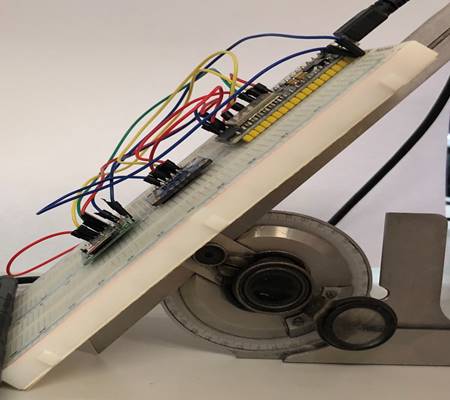
Versuchsaufbau
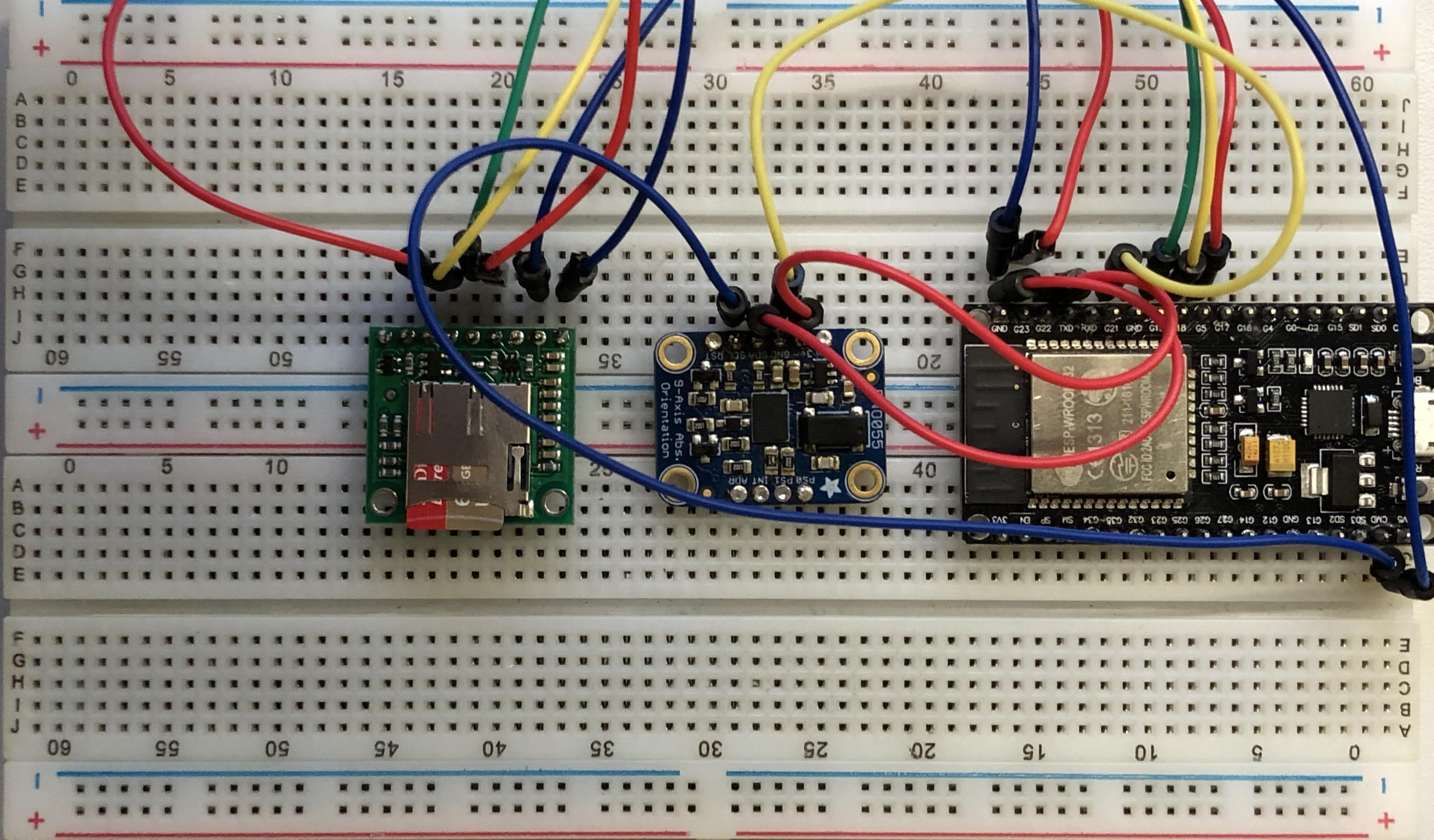
Versuchsaufbau BNO055 im statischen Test
Versuchsauswertung
|
|
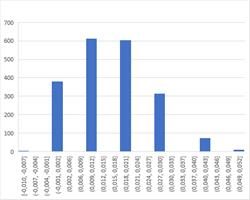
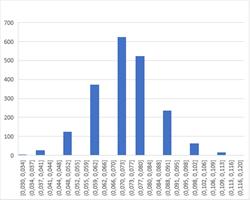
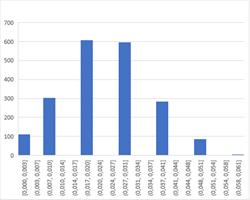
Beschleunigung X-Achse
|
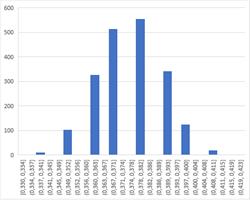
Beschleunigung Y-Achse
|
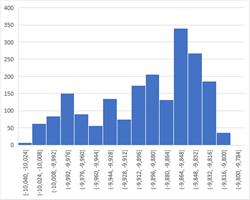
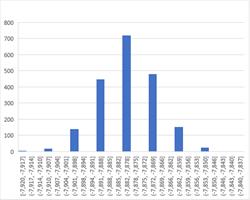
Beschleunigung Z-Achse
|
|
Minimum [m/s²]
|
-0,01
|
0,33
|
-10,03
|
|
Maximum
[m/s²]
|
0,06
|
0,41
|
-9,8
|
|
Mittelwert [m/s²]
|
0,2
|
0,37
|
-9,90
|
|
Range (Max-Min)
[m/s²]
|
0,07
|
0,08
|
0,23
|
|
Standardabweichung
|
0,01099048
|
0,0126748
|
0,05745211
|
|
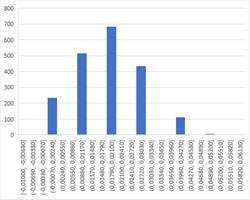
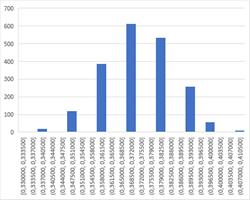
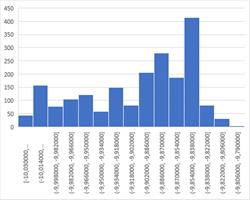
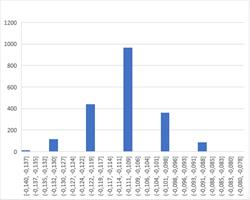
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_Statisch
Fazit
Bei ordungsgemäßer Funktion würden sich die Messwerte bei
dem statischen Test an die Gaus'sche
Normalverteilung annähern. Bei der
Beschleunigung in X- sowie in Y-Richtung nähern sich die Messwerte
diesem Sollzustand
an. Die Beschleunigungswerte in Z-Richtung nähern
sich keiner Normalverteilung an und müssen deshalb näher betrachtet werden.
Aufgrund der fehlerhaften Messergebnisse der
Beschleunigung in Z-Richtung wird in einer darauffolgenden Messung ein
anderer BNO055 Sensor im statischen Fall betrachtet. Außerdem wurde
hierzu ein neutraler Berater aus dem Gebiet der Sensortechnik
befragt (siehe Gesprächsprotokoll unter Protokolle). Desweiteren wird ein
erster dynamischer Test mit einem laufenden Rasierapparat neben dem
Sensor durchgeführt um die Anfälligkeit des BNO055 auf Vibrationen
festzustellen.
Erster dynamischer
Test mit dem BNO055
Versuchsbeschreibung
Bei dem ersten dynamischen Test wollten wir sehen wie der Sensor auf
Vibrationen reagiert und welchen Einfluss diese auf die Messergebnisse
haben. Hierzu haben wir einen Handelsüblichen Rasierer (unbekannte
Frequenz) neben dem Messaufbau platziert und während der
Datenerfassung laufen lassen.
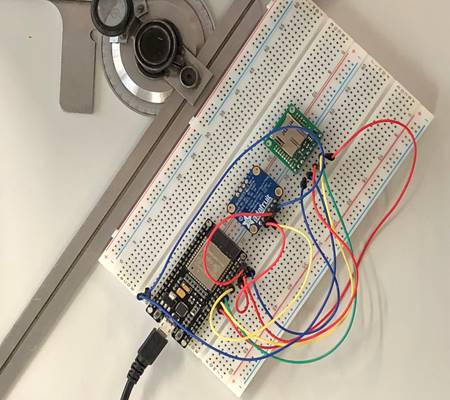
Versuchsaufbau
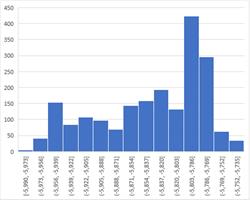
Versuchsaufbau mit BNO055 im dynamischen Test (laufender
Rasierer neben dem Versuchsaufbau)
Versuchsauswertung
|
|
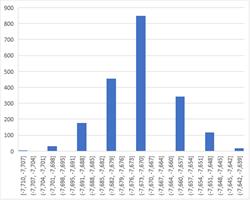
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
Beschleunigung Z-Achse
|
|
Minimum
[m/s²]
|
-0,01
|
0,33
|
-10,04
|
|
Maximum
[m/s²]
|
0,05
|
0,42
|
-9,79
|
|
Mittelwert [m/s²]
|
0,015
|
0,375
|
-9,894
|
|
Range (Max-Min)
[m/s²]
|
0,06
|
0,09
|
0,25
|
|
Standardabweichung
|
0,011163704
|
0,013424699
|
0,057822969
|
|
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_Dynamisch
Fazit
Bei den
Beschleunigungswerten in X- und Y-Richtung ist keine signifikante
Änderung zum statischen Test zu sehen. Die Beschleunigung in Z-Richtung zeichnet, wie
schon beim statischen Test, die Messwerte nicht Normalverteilt
auf.
Statischer Test mit einem anderen BNO055-Sensor
Versuchsbeschreibung
Hier wurde ein statischer Test in einer definierten Lage
durchgeführt. Hierfür wurde das Steckbrett auf einem Tisch platziert
und während der Messung wurde darauf geachtet, dass sich das
Steckbrett nicht bewegt.
Versuchsaufbau
Versuchsaufbau BNO055 im statischen Test
Versuchsauswertung
|
|
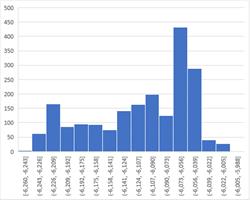
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
Beschleunigung Z-Achse
|
|
Minimum
[m/s²]
|
-0,14
|
-0,56
|
9,53
|
|
Maximum
[m/s²]
|
-0,08
|
-0,49
|
9,79
|
|
Mittelwert
[m/s²]
|
-0,110
|
-0,526
|
9,682
|
|
Range (Max-Min)
[m/s²]
|
0,06
|
0,07
|
0,26
|
|
Standardabweichung
|
0,009461266
|
0,013051881
|
0,062885945
|
|
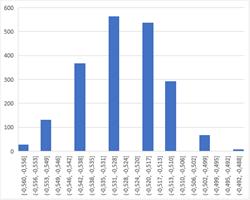
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor2_Test_Statisch
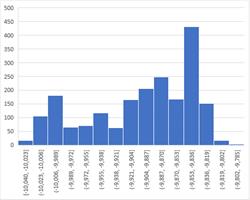
Fazit
An den Histogrammen der
verschiedenen Beschleunigungsdaten kann man, wie schon bei der
ersten Messung, erkennen das die Beschleunigungsdaten in Z-Richtung
sich von denen in X- und Y-Richtung unterscheiden.
Auffällig bei der Messung mit dem zweiten BNO055 Sensors ist ein
"Vorzeichenfehler" bei den Messwerten, dieser erklärt sich jedoch
durch die um 180° verdrehte Montage des Sensors. Deshalb sind bei
diesem Sensor ähnliche Erkenntnisse wie bei den Tests mit dem ersten
BNO055-Sensors zu treffen. Die Messwerte in Z-Richtung treten auch
bei diesem Sensor nicht normalverteilt auf.
Statischer Test mit einem Attitude
Heading Reference System (AHRS
3DM-GX3®-25 der Firma Microstrain)
Versuchsbeschreibung
Zum Vergleich der statischen gemessenen Werte des BNO055, haben wir
eine Vergleichsmessung mit einem Profigerät zur Trägheitsnavigation
durchgeführt. Das AHRS haben durch Kontakte in der Hochschule
erhalten. Die Kernaussage die wir mit diesem Test bestätigen wollen,
ist ob die Verteilung der Messwerte in Z-Richtung bei einem
Profigerät genauso streut wie bei dem BNO055 oder ob die
Messung/Berechnung der Werte hier genauer erfolgt.
Versuchsaufbau

Versuchsaufbau AHRS
Versuchsauswertung
|
|
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
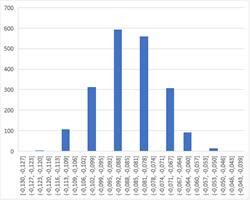
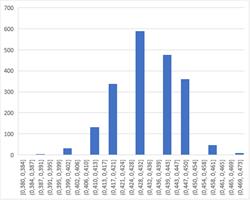
Beschleunigung Z-Achse
|
|
Minimum
[g]
|
0,001130506 |
0,018834645 |
-1,0034412 |
|
Maximum
[g]
|
0,004173631 |
0,022362353 |
-0,99993253 |
|
Mittelwert
[g]
|
0,002663406 |
0,020510045 |
-1,001604407 |
|
Range (Max-Min)
[g]
|
0,003043125 |
0,003527708 |
0,00350867 |
|
Standardabweichung
|
0,000508305 |
0,0005191 |
0,000540097 |
|
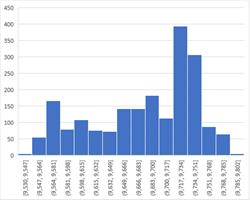
Histogramm
|
|
|
|
Link Excel-Datei:
AHRS_Test_Statisch
Fazit
Die Ergenisse des AHRS zeigen deutlich wie genau die
Beschleunigungsdaten in X-,Y- und Z-Richtung aufgezeichnet werden können. Bei
diesem System ist in der Z-Richtung wie auch in der X- und
Y-Richtung eine Annäherung an die Gaus'sche
Normalverteilung zu sehen. Aus diesem Versuch ziehen wir den
Schluss, dass die Werte in Z-Richtung bei dem BNO055 auf eine andere
Weise ermittelt werden als bei dem AHRS. Diese Ergenisse wurden der
Firma Bosch Sensortech mitgeteilt und nach Hinweisen auf möglichen
Ursachen gefragt. In den nachfolgenden Versuchen wurden die statischen
Versuche bei Neigungswinkeln von 30° um jede Achse (Grenzzustände
beim Betrieb) durchgeführt. Mit diesen Versuchen wollen wir sehen
wie sich die bisher "kritische" Beschleunigung in Z-Richtung bei
Neigung verhält und ob sich dieses Fehlerhafte Verhalten durch die
Neigungswinkel auf die anderen Achsen überträgt.
Statische Tests mit Neigung des BNO055
30° Neigung um die X-Achse (Rollen)
Versuchsbeschreibung
In den folgenden Tests
haben wir die statischen Versuche mit kritischen Neigungswinkeln (30°
um jede Achse) im Drohnenflug durchgeführt. Hiermit wollten wir
überprüfen ob sich der Fehler in der Z-Achse auf die anderen Achsen
fortplfanzt.
Versuchsaufbau
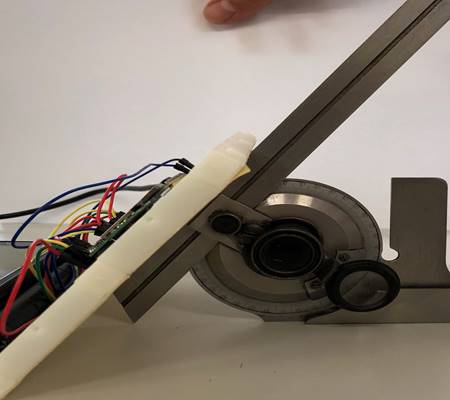
Versuchsaufbau BNO055 (30° um die X-Achse geneigt)
Versuchsauswertung
|
|
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
Beschleunigung Z-Achse
|
|
Minimum
[m/s²]
|
0,03
|
-7,71
|
-6,26
|
|
Maximum
[m/s²]
|
0,12
|
-7,64
|
-6
|
|
Mittelwert
[m/s²]
|
0,072
|
-7,671
|
-6,110
|
|
Range (Max-Min)
[m/s²]
|
0,09
|
0,07
|
0,26
|
|
Standardabweichung
|
0,013059828
|
0,011199821
|
0,060839026
|
|
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_30X_Statisch
30° Neigung um die Y-Achse (Nicken)
Versuchsbeschreibung
In den folgenden Tests
haben wir die statischen Versuche mit kritischen Neigungswinkeln (30°
um jede Achse) im Drohnenflug durchgeführt. Hiermit wollten wir
überprüfen ob sich der Fehler in der Z-Achse auf die anderen Achsen
fortplfanzt.
Versuchsaufbau
Versuchsaufbau BNO055 (30° um die Y-Achse geneigt)
Versuchsauswertung
|
|
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
Beschleunigung Z-Achse
|
|
Minimum
[m/s²]
|
-7,92
|
-0,13
|
-5,99
|
|
Maximum
[m/s²]
|
-7,84
|
-0,04
|
-5,74
|
|
Mittelwert [m/s²]
|
-7,879
|
-0,085
|
-5,838
|
|
Range (Max-Min) [m/s²]
|
0,08
|
0,09
|
0,25
|
|
Standardabweichung
|
0,011484384
|
0,012693362
|
0,060082649
|
|
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_30Y_Statisch
30° Neigung um die Z-Achse (Gieren)
Versuchsbeschreibung
In den folgenden Tests
haben wir die statischen Versuche mit kritischen Neigungswinkeln (30°
um jede Achse) im Drohnenflug durchgeführt. Hiermit wollten wir
überprüfen ob sich der Fehler in der Z-Achse auf die anderen Achsen
fortplfanzt.
Versuchsaufbau
Versuchsaufbau BNO055 (30° um die Z-Achse geneigt)
Versuchsauswertung
|
|
Beschleunigung X-Achse
|
Beschleunigung Y-Achse
|
Beschleunigung Z-Achse
|
|
Minimum
[m/s²]
|
0
|
0,38
|
-10,04
|
|
Maximum
[m/s²]
|
0,06
|
0,47
|
-9,79
|
|
Mittelwert
[m/s²]
|
0,024
|
0,433
|
-9,899
|
|
Range (Max-Min)
[m/s²]
|
0,06
|
0,09
|
0,25
|
|
Standardabweichung
|
0,012157451
|
0,013394989
|
0,059464423
|
|
Histogramm
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_30Z_Statisch
Fazit aus den Neigungsversuchen
An
den Histogrammen der statischen Neigungsversuche ist zu erkennen,
dass die Beschleunigungen in Richtung der X- sowie der Y-Achse eine
Annäherung an eine Normalverteilung darstellen. Jedoch ist die
Beschleunigung in Richtung der Z-Achse wie auch schon bei dem
statischen Test in Nulllage nicht Normalverteilt und weist außerdem
die größte Range der Messwerte auf.
Aus den Ergebnissen kann man erkennen,
dass der Fehler der Z-Achse sich durch die Neigungswinkel nicht auf
die X- und Y-Achse fortpflanzt.
Es ist möglich das diese
Verteilung auf einer Berechnung der Messwerte in Z-Richtung beruhen.
Möglicherweise wurde ein Kalman-Filter Element benutzt um die
Beschleunigungswerte in Z-Richtung abzuleiten. Um diese Vermutung zu
bestätigen werden weitere statische Tests mit dem BNO055
durchgeführt. Es wird eine Messreihe durchgeführt um die
Stabilität der Messwerte zu überprüfen. Hierfür wird der statische
Test in Nullage in 15 Minuten Abständen durchgeführt und die
erfassten Messwerte werden miteinander verglichen.
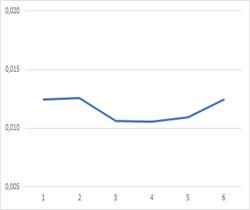
Stabilitätstest des Bosch BNO055
Sensor 1
Versuchsbeschreibung
Der BNO055 Sensor wurde auf mit einem Schraubstock und zwei
Schraubzwingen fest positioniert. In einem definierten Zeitintervall
werden die Messwerte des Sensors aufgezeichnet. Bei den statischen
Versuchen zur Stabilität wurden 6 Messreihen mit je 2000 Messwerten
aufgezeichnet. Aus jeder Messreihe wurde der Mittelwert der
Beschleunigungen in X-,Y- und Z-Richtung in den Schaubildern
dargestellt.
Versuchsaufbau
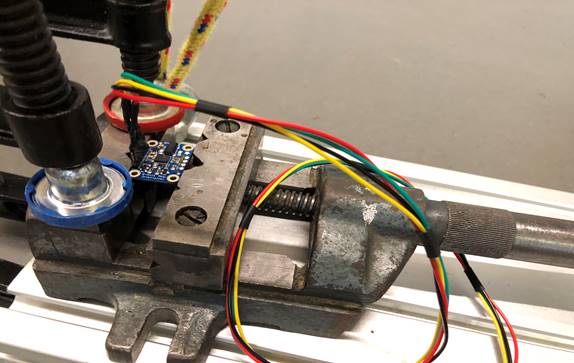
Versuchsaufbau BNO055 (in Schraubstock eingespannt)
Versuchsauswertungen
|
|
Beschleunigung X-Achse
|
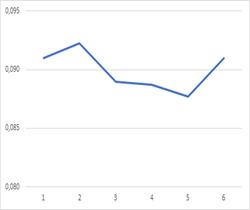
Beschleunigung Y-Achse
|
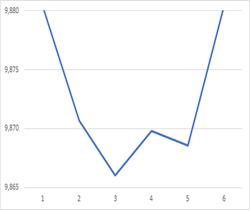
Beschleunigung Z-Achse
|
|
Mittelwert Messung 1
[m/s²]
|
0,012
|
0,091
|
9,880
|
|
Mittelwert Messung 2
[m/s²]
|
0,013
|
0,092
|
9,871
|
|
Mittelwert Messung 3
[m/s²]
|
0,011
|
0,089
|
9,866
|
|
Mittelwert Messung 4
[m/s²]
|
0,011
|
0,089
|
9,870
|
|
Mittelwert Messung 5
[m/s²]
|
0,011
|
0,088
|
9,869
|
|
Mittelwert Messung 6
[m/s²]
|
0,012
|
0,091
|
9,880
|
|
Range
|
0,002
|
0,004
|
0,014
|
|
Verlauf
|
|
|
|
Link Excel-Datei:
BNO055_Sensor1_Test_Stabilität
Fazit
Bei den Auswertungen zur
Stabilität ist zu sehen, dass die Beschleunigungen in X- und
Y-Richtung eine sehr geringe Streuung aufweisen. Bei der Streuung
der Z-Achse spielt sehen wir eine etwas größere "Range" und können
daher die Aussage treffen, dass die Messwerte in Z-Achse nicht
stabil sind.
|