In einer Größe <1m Länge gibt es kaum Beispiele für autonome
Unterwasserfahrzeuge. Eine wissenschaftliche Veröffentlichung der
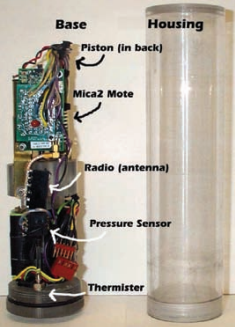
University of California beschreibt einen selbst-tauchenden
Sensorträger in zylindrischer Form. Das Gerät ist 23,5cm lang und
hat 6cm Durchmesser. Die maximale Tauchtiefe beträgt 1,5m, da es nur
in einem Tauchtank eingesetzt wurde, und nicht in einem natürlichen
Gewässer.

.JPG)
(https://doi.org/10.1016/S1474-6670(17)31982-1)
(RC U-Boot mit Verbrennungsmotor) (Analoge
Steuerung)
Das Gerät (links) besitzt einen Kolben, um seine Wasserverdrängung zu
verändern. Ein Antrieb sowie eine Ruderanlage fehlen.
Kleine
AUVs (autonomous underwater vehicle) werden außerdem von der Öl- und
Gasindustrie eingesetzt, um Karten des Meeresbodens zu erstellen.
Diese Daten werden benötigt, um die Lage von Pipelines und
Bohrstellen festzulegen.
AUVs werden auch für die Inspektion und
Wartung von Pipelines verwendet.
Das U-Boot (mittig und
rechts) besitzt eine Wasserverdrängung von 15Kg und eine rein
analoge Steuerung. Dadurch ist ein aktives Halten der Tiefe nicht
möglich. Ein Verbrennungsmotor für die Überwasserfahrt sowie ein
elektrischer Antrieb unter Wasser sorgen für Vortrieb. Das Volumen
der Ballasttanks beträgt 3L, um den verhältnismäßig großen Turm aus
dem Wasser zu heben. Dieser beinhaltet die Frisch- und Abluftanlage
mit ihren Ventilen. |