|
Lösungskomponenten
| B Teilfunktion:
Bewegung der Freiheitsgrade |
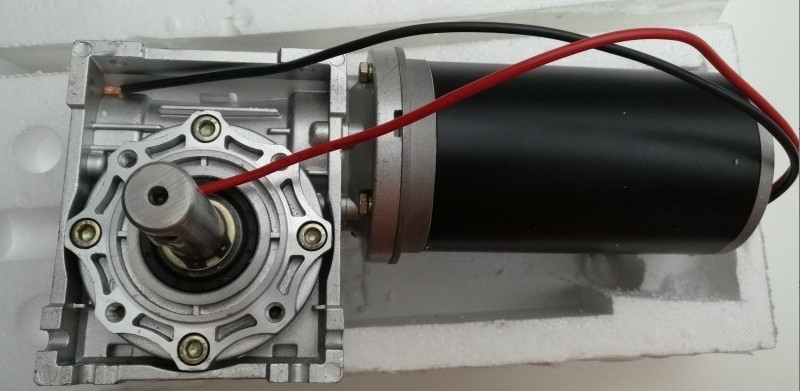
B.1 - DC-Motoren
| Vorteile: |
Nachteile: |
| Hohes
Drehmoment bei niedrigen Drehzahlen |
Lärm |
| Kostengüngstig |
|
| |
|
| B Teilfunktion:
Bewegung der Freiheitsgrade |
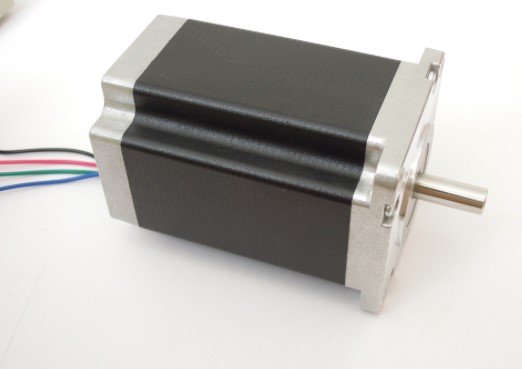
B.2 - Schrittmotoren
| Vorteile: |
Nachteile: |
|
Sehr zuverlässig, da es keine Kontaktbürsten verwendet |
Geringe
Beschleunigung |
| Der Motor hat
ein hohes Drehmoment im Stillstand |
|
| |
|
| B Teilfunktion:
Bewegung der Freiheitsgrade |
B.3 - Drehstrommotoren
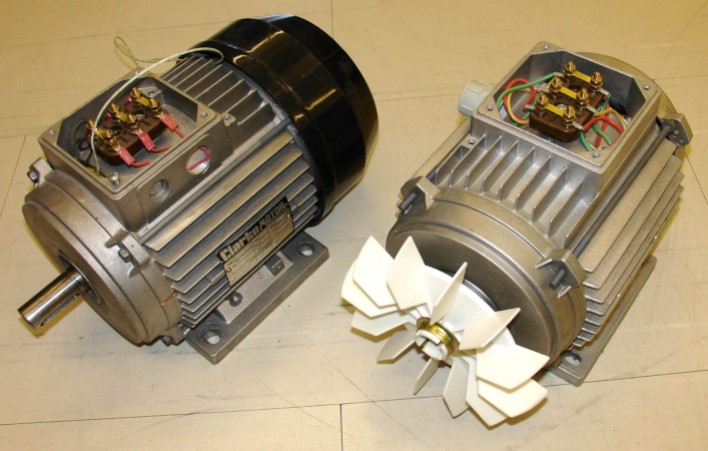 |
| Abb.: Drehstrommotoren (Quelle) |
| Vorteile: |
Nachteile: |
| Wenig
Energiebedarf beim Start-up |
komplexe Drehzahlregelung |
| leicht zu
reparieren |
|
| |
|
| C Teilfunktion:
Positionskontrolle der Motoren |
C.1 - ESP32
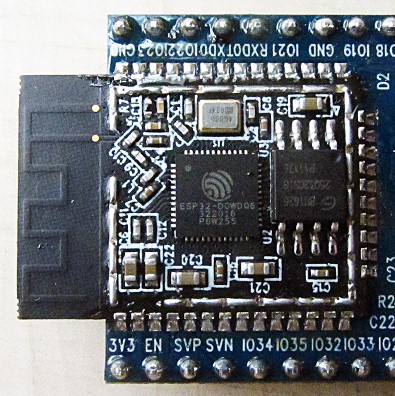 |
| Abb. Nr.: Teilebezeichnung |
| Vorteile: |
Nachteile: |
| Kostengünstig |
erfordert Signalkonditionierung |
| Programme
können drahtlos geladen werden |
|
| |
|
| C Teilfunktion:
Positionskontrolle der Motoren |
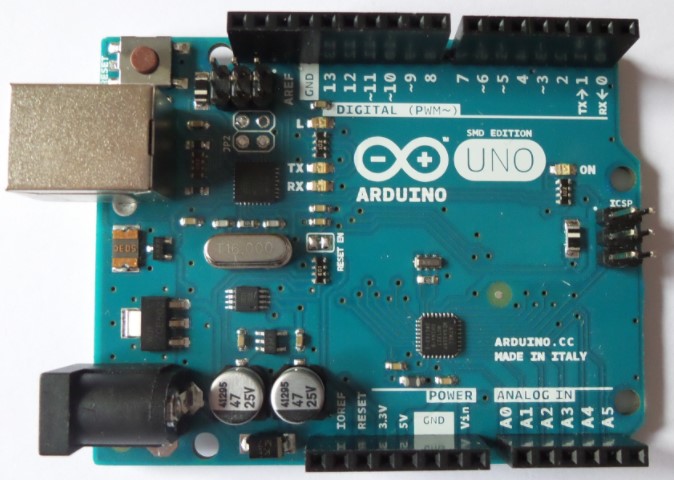
C.2 - Arduino
| Vorteile: |
Nachteile: |
|
Signalkonditionierung |
Programme müssen über ein Kabel
geladen werden |
| |
|
| |
|
| C Teilfunktion:
Positionskontrolle der Motoren |
C.3 - Rasperry Pi
| Vorteile: |
Nachteile: |
| Mehr
Taktgeschwindigkeit |
Teuer |
| Mehr Speicher |
|
| |
|
| D Teilfunktion:
Messung der Position der Motoren |
D.1 - Hall Sensoren
 |
| Abb.: Hallsensor 6127V1A360L.5 (Quelle) |
| Vorteile: |
Nachteile: |
| Unempfindlich
gegenüber Verschmutzung |
Messprobleme bei hohen
Geschwindigkeiten |
| Niedrige
Kosten |
|
| |
|
| D Teilfunktion:
Messung der Position der Motoren |
D.2 - Encoder
| Vorteile: |
Nachteile: |
| Hohe Auflösung |
Anfällig gegenüber Fremdkörpern |
| hohe Exaktheit
möglich |
|
| |
|
| D Teilfunktion:
Messung der Position der Motoren |
D.3 - Potentiometer
 |
| Abb.: Leitplastik-Potentiometer (Quelle) |
| Vorteile: |
Nachteile: |
| Einfach zu
implementieren |
nicht verlässlich |
| |
|
| |
|
| E Teilfunktion:
Signalkonditionierung |
E.1 - Spannungsteiler
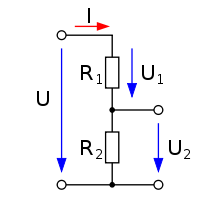 |
| Abb.: Spannungsteiler (Quelle) |
| Vorteile: |
Nachteile: |
| Einfach zu
implementieren |
Nicht energieeffizient |
| |
|
| |
|
| E Teilfunktion:
Signalkonditionierung |
E.3 - Opamp
| Vorteile: |
Nachteile: |
| Flexibilität |
Schwer zu kalibrieren |
| |
|
| |
|
|