|
Lösungskomponenten
| A Teilfunktion:
Pedalbeweggung messen |
A.1 - Zahnstange mit Potentiometer
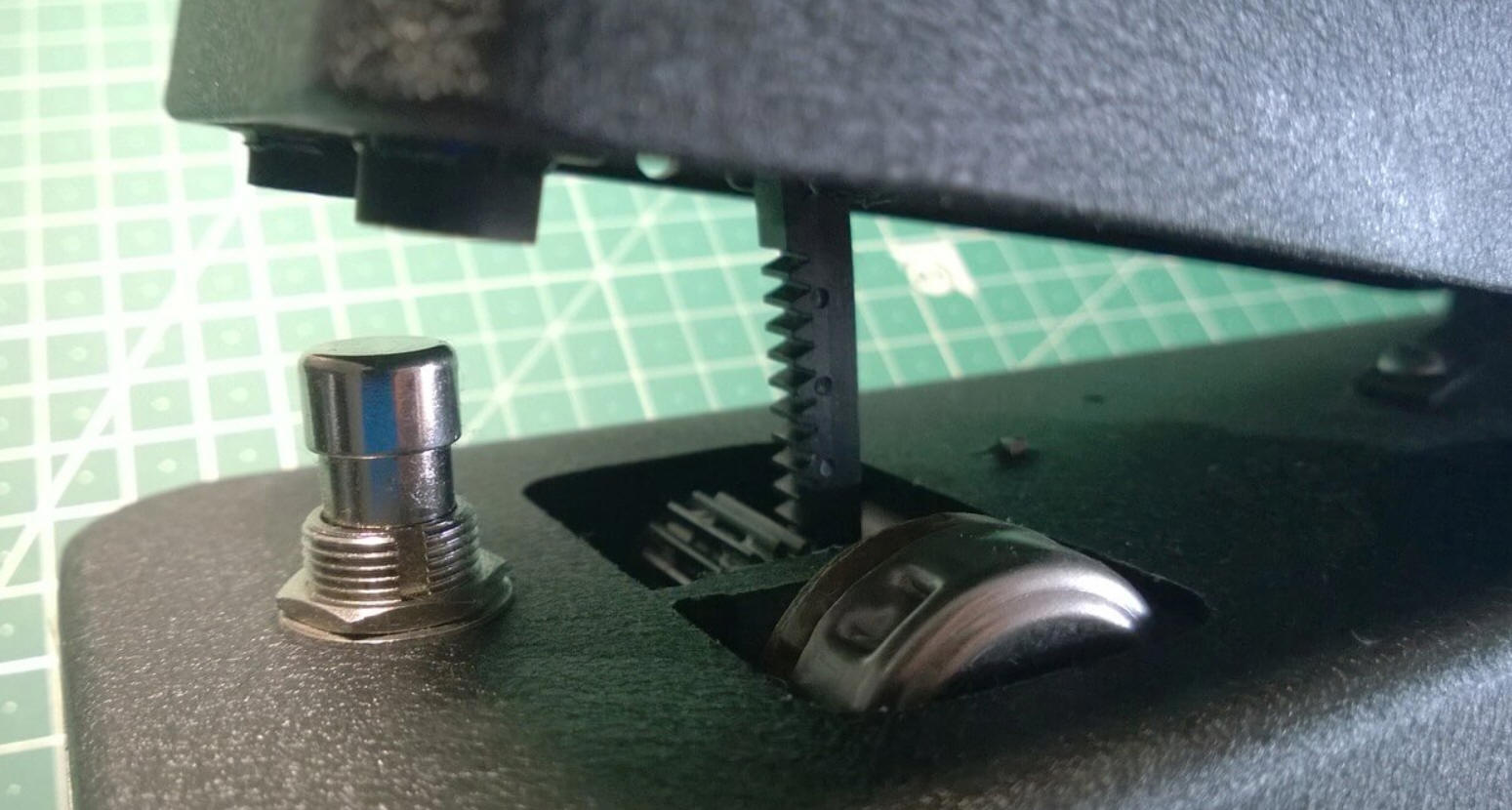 |
| Abb.: Potentiometereinstellung über
Zahnstange in einem Wah Pedal
(Quelle) |
| Vorteile: |
Nachteile: |
| Kostengünstig |
|
| Vorgefertigte
Varianten in Pedalform erhältlich |
|
| |
|
| |
|
| |
|
| A Teilfunktion:
Pedalbeweggung messen |
A.2 - Induktiver Wegsensor
| Vorteile: |
Nachteile: |
| |
teuer |
| |
Anbindung an Pedal umzusetzen |
| |
|
| |
|
| |
|
| A Teilfunktion:
Pedalbeweggung messen |
A.3 - Inkrementaldrehgeber
| Vorteile: |
Nachteile: |
| Drehrichtung
könnte als Eingangsgröße vom Nutzer des Pedals verwertet
werden |
teurer als Potentiometer
|
| |
Anbindung an Pedal umzusetzen |
| |
|
| |
|
| |
|
| B Teilfunktion:
Eingangsdaten verarbeiten und Aktorsignal ableiten |
B.1 Mikrocontroller
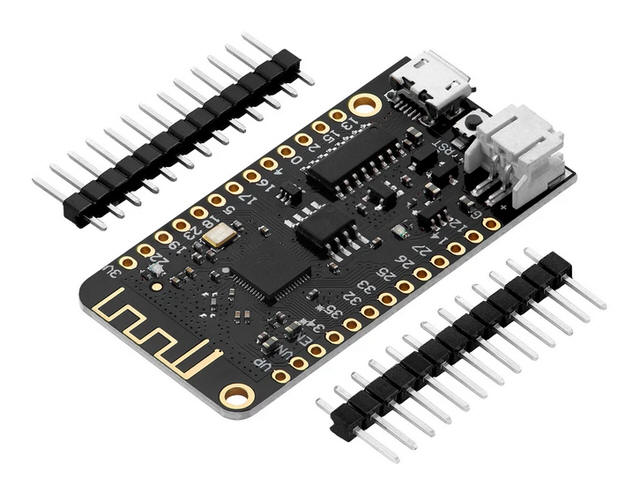 |
| Abb.: Mikrocontroller ESP32
LOLIN
(Quelle) |
| Vorteile: |
Nachteile: |
| kostengünstig |
|
|
sehr
energieeffizient |
|
| flexible
Einsatzmöglichkeiten |
|
| |
|
| |
|
| B Teilfunktion:
Eingangsdaten verarbeiten und Aktorsignal ableiten |
B.1 Speicherprogrammierbare Steuerung
 |
| Abb.: Speicherprogrammierbare
Steuerung |
| Vorteile: |
Nachteile: |
| |
Programmabarbeitung zyklisch mit
niedrigerer Frequenz |
| |
teuer |
| |
|
| |
|
| |
|
| C Teilfunktion: freie
Schnurlänge reduzieren |
C.1 Aufwickeln der Schnur auf einer
Winde mittels Motor
 |
| Abb.: Schnur auf Winde aufgerollt
(Quelle) |
| Vorteile: |
Nachteile: |
| Wandlung der
translatorischen Bewegung in Rotationsbewegung |
|
| saubere
Schnurverwahrung ohne Verknoten |
|
| |
|
| |
|
| |
|
| D Teilfunktion: freie
Schnurlänge erhöhen |
D.1 mechanischer Freilauf
| Vorteile: |
Nachteile: |
| geringe Masse |
weiteres Bauteil |
|
kleinstmögliches Trägheitsmoment im Steigflug, da andere
Teile unbewegt bleiben |
|
| |
|
| |
|
| |
|
| D Teilfunktion: freie
Schnurlänge reduzieren |
D.2 Mitdrehen der Antriebseinheit (Windenrad bis Rotor des Motors)
 |
| Abb.: Schrittmotor mit Kupplung an
einer Welle
(Quelle) |
| Vorteile: |
Nachteile: |
| wenige
Bauteile benötigt |
Motor wird Gegenmoment aufbringen |
| Umdrehungen im
Steigflug könnten ermittelt werden --> Seillänge wäre im
System ermittelbar |
|
| |
|
| |
|
| |
|
| E Teilfunktion:
Momentenübertragung von Antrieb auf Winde |
E.1 - Montage der Winde auf einer
Welle; Antrieb der Welle mittels Balgkupplung
| Vorteile: |
Nachteile: |
| starre
Verbindung, kein Verlust von Bewegungsenergie durch Dämpfung
in elastischen Bauelementen |
hohe Genauigkeitsanforderungen an
die Montage der Wellen (axial, radial & Winkelmaß) |
| |
|
| |
|
| |
|
| |
|
| E Teilfunktion:
Momentenübertragung von Antrieb auf Winde |
E.2 - Montage der Winde auf einer
Welle; Antrieb der Welle mittels Doppelschlaufenkupplung
| Vorteile: |
Nachteile: |
|
Schwingungsdämpfend |
Begrenzung der Drehzahl (bis i.d.R
bis 3000 1/min) |
|
Ungenauigkeiten beim Fluchten der Wellen gefährden Rundlauf
nicht |
|
| |
|
| |
|
| |
|
|
| E Teilfunktion:
Momentenübertragung von Antrieb auf Winde |
E.3 - Verbindung Motorwelle zu
Welle mit Winde über Riemen
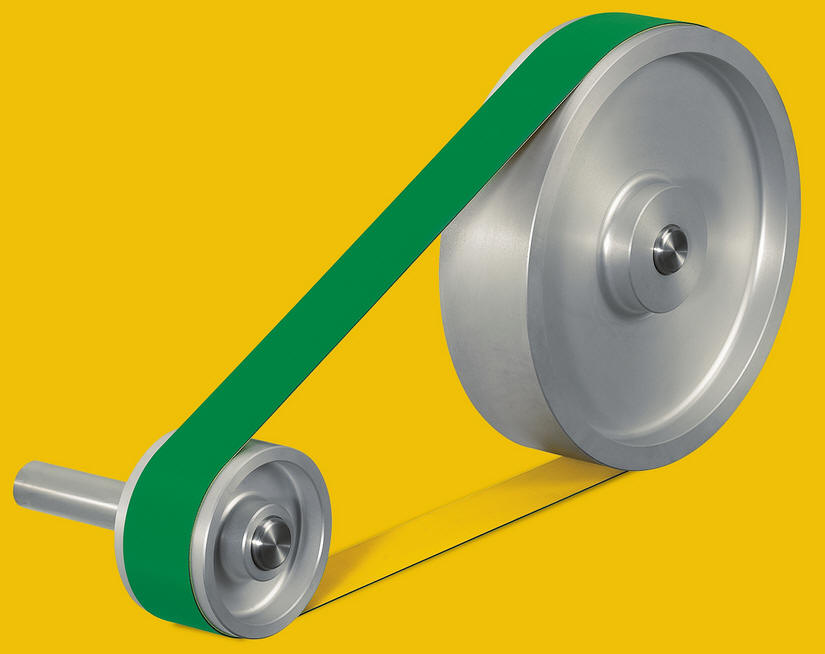 |
| Abb.: Riemenverbundund mit Antrieb
(Quelle) |
| Vorteile: |
Nachteile: |
| |
höhere Anzahl an Bauteilen:
Übersetzungsritzel, mehr Wälzlager |
| |
|
| |
|
| |
|
| |
|
|
| F Teilfunktion:
Motorvariante |
F.1 - Gleichstrommotor
| Vorteile: |
Nachteile: |
| höhere
Drehzahlen realisierbar |
Stufenlose Einstellung der
Geschwindigkeit nicht möglich |
| schnellere
Reaktionszeit im Vergleich zu einem Schrittmotor |
für langsame Drehzahlen häufig
Getriebeübersetzung notwendig |
| |
|
| |
|
| |
|
| F Teilfunktion:
Motorvariante |
F.2 - Schrittmotor
| Vorteile: |
Nachteile: |
| kein Drehgeber
notwendig |
Drehzahlen begrenzt |
| über
Mikrocontroller einfach steuerbar |
Energieverbrauch im Stillstand
durch Haltemoment muss vermieden werden |
| |
|
| |
|
| |
|
| F Teilfunktion:
Motorvariante |
F.3 - Servomotor
| Vorteile: |
Nachteile: |
| Genaue
Positionierung |
i.d.R. keine kontinuierlichen
Rotationen |
| genaues
Positionsfeedback |
Drehzahlen begrenzt |
| |
|
| |
|
| |
|
| G Teilfunktion: Schnurführung für Flug in Bodennähe
(Start & Landung) |
G.1 - Erhöhung der Drohne durch
Landegestell
 |
| Abb.: Erhöhung der Drohne durch
Landegestell
(Quelle) |
| Vorteile: |
Nachteile: |
| Erhöhung
Abstand zwischen Rotoren und auf Boden aufliegender Schnur
--> "Verfangen" unwahrscheinlicher |
zusätliches Gewicht für die Drohen |
| geringe Masse |
geringfügige negative Auswirkungen
auf die Flugdauer möglich |
| |
|
| |
|
| |
|
| G Teilfunktion: Schnurführung für Flug in Bodennähe
(Start & Landung) |
G.2 - Laden auf überhöhter
Plattform
| Vorteile: |
Nachteile: |
| Erhöhung
Abstand zwischen Rotoren und auf Boden aufliegender Schnur
--> "Verfangen" unwahrscheinlicher |
Mobilität des Aufbaus deutlich
reduziert: Landen nur an einem Punkt möglich |
| |
|
| |
|
| |
|
| |
|
| G Teilfunktion: Schnurführung für Flug in Bodennähe
(Start & Landung) |
G.3 - Schnurführung durch Öse in
Bodennähe
| Vorteile: |
Nachteile: |
| Einfache
Handhabung |
eine einzelne Öse könnte im Betrieb
nicht ausreichen, um sichere Schnurführung zu gewährleisten |
| Absicherung,
dass Schnur in günstigem Winkel von Rotoren ferngehalten
wird |
|
| |
|
| |
|
| |
|
| H Teilfunktion:
Energieversorgung |
H.1 - ein Akku für die Versorgung der
Datenverarbeitungseinheit und ein Akku für den
Motor
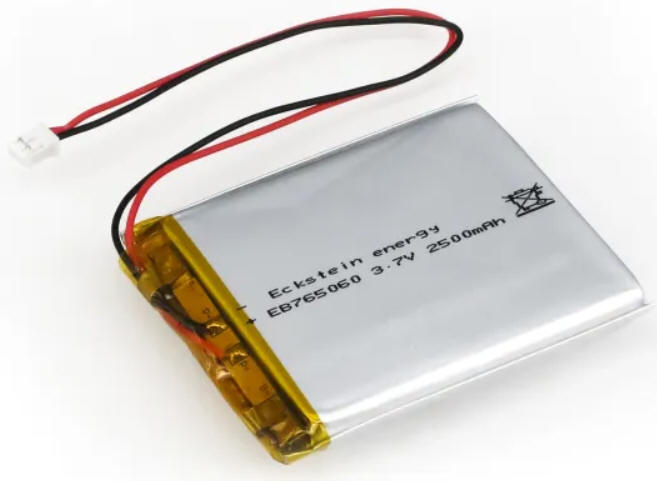 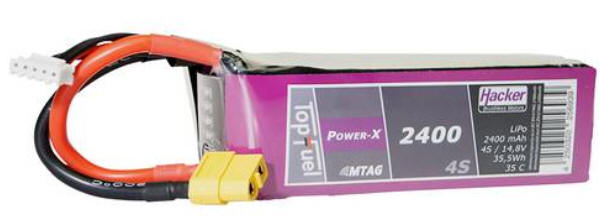 |
| Abb.: Getrennte Akkus für
Mikrocontroller und Motor (Quelle1)(Quelle2) |
| Vorteile: |
Nachteile: |
| einfache
Verschaltung |
|
| Akkus können
einzeln ausgetauscht werden |
|
| |
|
| |
|
| |
|
|