|
|
Bachelorthesis Entwicklung eines Seilroboters zur Beschriftung von Oberflächen Development of a Cable Robot for Plotting on Surfaces |
Sommersemester 2019 jato1016 |
|
|
Bachelorthesis Entwicklung eines Seilroboters zur Beschriftung von Oberflächen Development of a Cable Robot for Plotting on Surfaces |
Sommersemester 2019 jato1016 |
|
|||
|
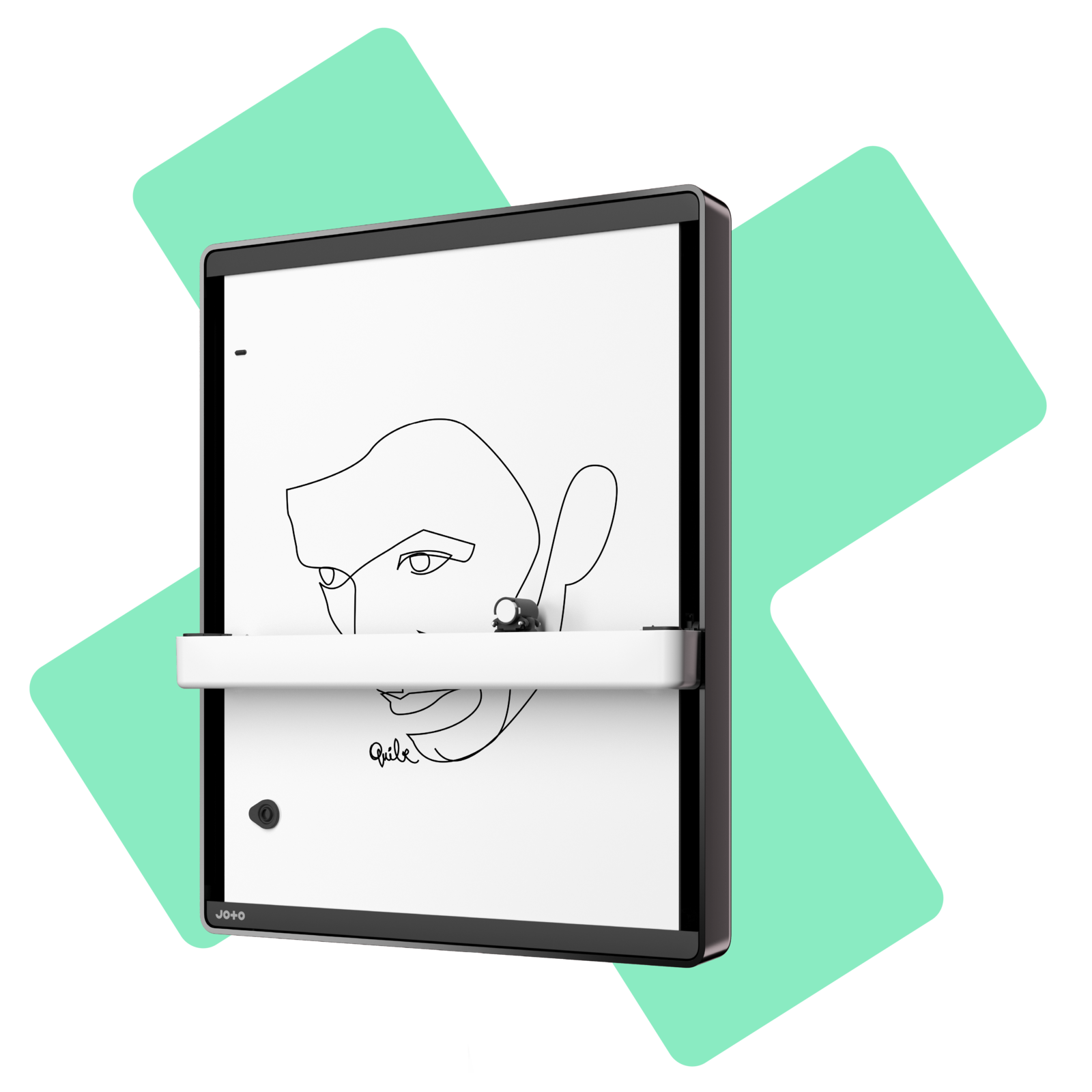
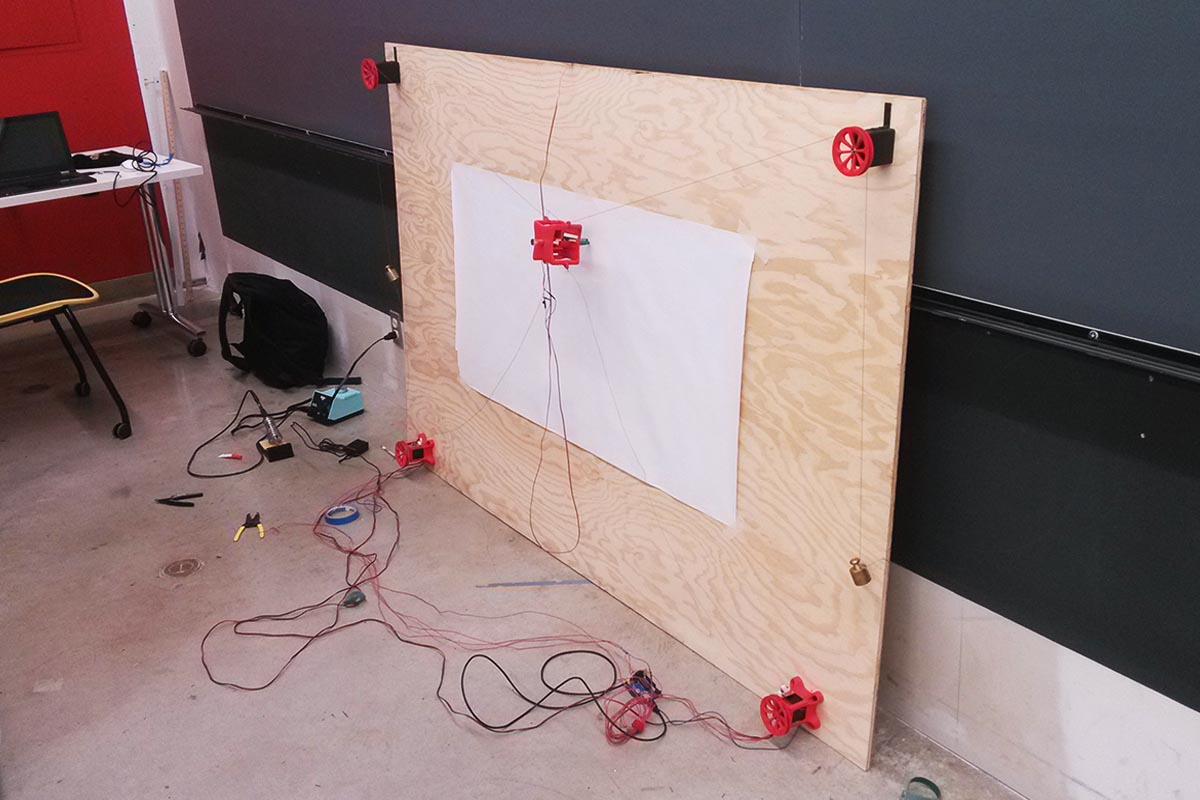
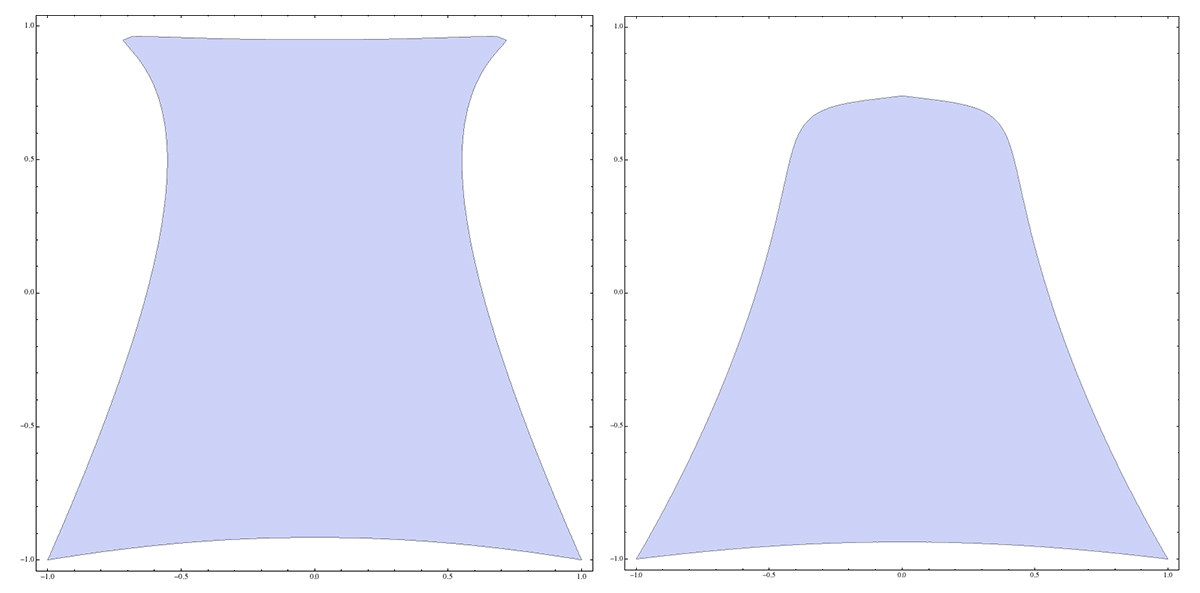
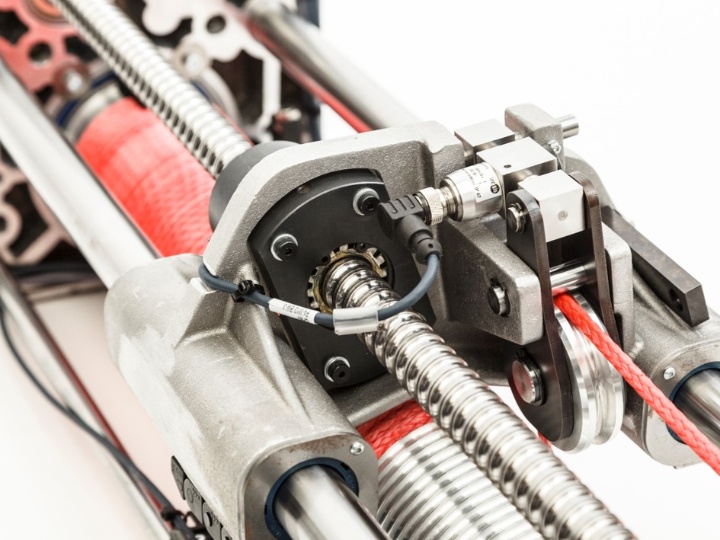
Auf dem Markt und in diversen Projektdokumentationen sind verschiedene Seilroboter zu finden, die unterschiedlichste Aufgaben erfüllen. Einer breiteren Öffentlichkeit wurde die Technik der Seilroboter maßgeblich durch die Spidercam-Systeme bekannt, die in Sportstadien für die Kameraführung über dem Spielfeld eingesetzt werden Die Beispiele zum Stand der Technik werden in folgende Bereiche gegliedert: 1. Roboter zur Beschriftung/Bemalung von Oberflächen 2. weitere 2D-Seilroboter 3. 3D-Seilroboter 4. vorhandene Firmwares zur Ansteuerung von Seilrobotern zur Oberflächenbeschriftung 1. Roboter zur Beschriftung/Bemalung von Oberflächen 1.1 kartesischer Malroboter zur Beschriftung von vertikalen Oberflächen: Woodpecker Woodpecker ist für das gleiche Anwendungsspektrum konstruiert, auf welches auch diese Arbeit abzielt. In den Seilroboter können verschiedene Stifte eingespannt werden, sodass er eine Vielzahl von Oberflächen auf unterschiedliche Arten beschriften kann. Der Roboter basiert auf einem kartesischen 2-Achs-System, welches das Werkzeug auf der Oberfläche positioniert. Dieses System ist an einen starren Rahmen gebunden, welcher laut Aussage der Entwickler skalierbar und leicht ist. Die Absenkung des Stiftes kommt ohne elektronische Komponenten am Druckkopf aus, wie genau dies implementiert ist, ist leider nicht aus der Dokumentation oder den Videos ersichtlich. Der Roboter hat eine Anbindung ans Internet, sodass Nutzer mit dem Roboter interagieren können. 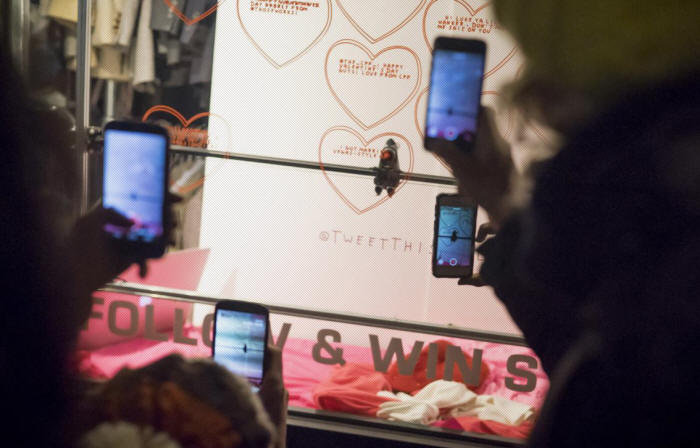 Woodpecker beim beschriften eines Schaufensters. Der Text in den Herzen kann von Passanten vorgegeben werden. (Quelle) Vorteile: -einfache Kinematik -relativ steifer Aufbau -einfacher Aufbau -in Grenzen skalierbar -"elektronikfreie" Stiftabsenkung (nicht näher spezifiziert) -Beschriftung von beliebigen Oberflächen Nachteile: -hohe bewegte Masse -relativ langsame Bewegung -Skalierbarkeit begrenzt durch starren Rahmen 1.2 Nachfolgeprojekt der Entwickler von Woodpecker: Joto Joto stellt das Nachfolgeprojekt des Woodpecker-Roboters dar. Es handelt sich um ein selbstbeschriftendes und selbstreinigendes Whiteboard. Nutzer können Zeichnungen über eine App an das Whiteboard übertragen, dies kann auch von einem beliebigen Standort aus über das Internet erfolgen. Somit ist eine Kommunikation über Joto möglich. Das Joto-Whiteboard arbeitet nicht mit einem herkömmlichen Stift: Im Korpus des Gerätes befindet sich ein wiederbefüllbares Tintenreservoir, der Malkopf besteht nur aus einem Faserstück, ähnlich der Mine eines Filzstiftes. Dieses wird während des Malprozesses immer wieder in das Tintenreservoir getaucht, sodass immer genug Farbe zum zeichnen vorhanden ist. Dies verkleinert den Malkopf, gleichzeitig kann so mehr Tinte im Gerät vorrätig gehalten werden. Das Whiteboard besitzt zudem eine Funktion zur Selbstreinigung. Unter der Querachse befindet sich ein Schwamm, welcher auf das Whiteboard aufgepresst werden kann. Durch Verfahren der Hochachse kann sich Joto selbst reinigen. 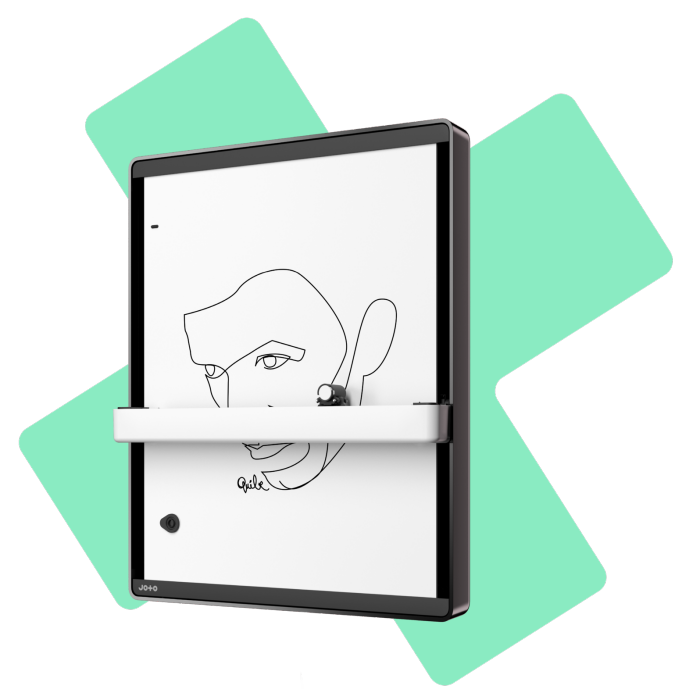 (Quelle) Vorteile: -einfache Kinematik -steifer Aufbau -wird fertig aufgebaut geliefert -Plug and Play -selbstreinigend Nachteile: -hohe bewegte Masse -relativ langsame Bewegung -nicht skalierbar -keine Beschriftung beliebiger Oberflächen -relativ laute Betriebsgeräusche 1.3 halbautomatisiertes Beschriften von Wänden ohne Verfahrsystem: Sprayprinter Das Sprayprinter-System besteht aus einem Aufsatz für Sprühdosen und einer Smartphone-App. Das Smartphone wird auf einem Stativ vor der zu beschriftenden Oberfläche aufgestellt und per Bluetooth mit der Hardware verbunden. Zunächst wird ein Bild vom Anwender mithilfe der Smartphone-App in Layer unterteilt, die jeweils eine Farbe enthalten. Zur Erstellung der realen Grafik wird die Sprühdose mit Aufatz vom Benutzer händisch über die zu bemalende Oberfläche bewegt, wobei die Position der Sprühdose über die Kamera des Smartphones bestimmt wird. Befindet sich die Sprühdose an einer Position, an welcher ein Pixel der aktuellen Farbe aufgetragen werden soll, so geschieht dies automatisch durch öffnen eines Ventils. So kann quasi jeder Benutzer, unabhängig von seinen persönlichen Malkünsten, Wandgemälde mit Sprühdosen erstellen. Das Verfahren dabei ist jedoch recht langwierig. 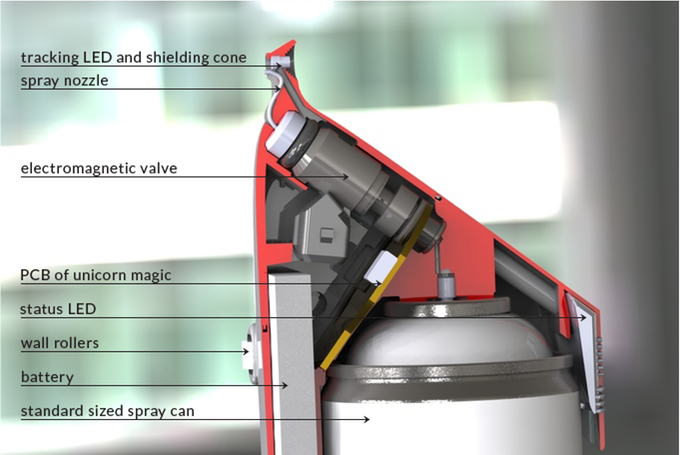 Aufbau der Sprayprinter-Hardware (Quelle)  Layer für Layer entsteht ein mehrfarbiges Bild (Quelle) Leider ist aktuell nur noch die Kickstarter-Seite des Projektes erreichbar, unter der dort angegebenen Website "sprayprinter.com" findet man den "Robot Muralist", welcher unter (1.4) vorgestellt wird. Beide Drucker wurden vom gleichen Starup entwickelt. 1.4 Seilroboter zur Beschriftung großer Wände: Robot Muralist Der Robot Muralist ist ein Seilroboter, der mit Sprühfarbe große Wandgemälde erstellt. An der Gondel des Roboters befinden sich 5 Sprühdosen. Der Sprühkopf kann die aufzutragenden Farben mischen und arbeitet die zu bemalende Fläche in (vertikalen) Streifen ab, das Prinzip ähnelt dem eines herkömmlichen Inkjet-Druckers. Zur schnelleren Trocknung der Farben befindet sich ein Gebläse in der Gondel, welche sich mit Rollen an der Wand abstützt. Die maximale Wandgröße ist nicht angegeben, es wurden jedoch bereits Gemälde mit einer Größe von 11m x 16m erstellt. Mit einer Arbeitsgeschwindigkeit von 1m² pro Minute handelt es sich um ein sehr schnelles Gerät.  Bild einer Biene, welches mit dem Robot Muralist erstellt wurde. (Quelle)  Der Robot Muralist eignet sich so auch, um an Hauswänden großflächige Werbeanzeigen aufzutragen, wie bereits in Kooperation mit Nissan gezeigt wurde. (Quelle) 1.3 Seilroboter zur Beschriftung von vertikalen Oberflächen: Polargraph Der Polargraph-Plotter arbeitet mit Perlenketten als Spannseil, diese werden mittels gedruckter Ritzel bewegt. Durch die Steuersoftware ist es nur möglich, Bitmap-Grafiken zu verarbeiten und künstlerisch verfremdet darzustellen (im Gegensatz zu vielen anderen Plottern, die Vektorgrafiken als "Line-Art"-Bilder plotten/ausgeben). Somit zielt der Polargraph-Plotter auf künstlerische Anwendungen ab und ist z.B. für das Anbringen von Koordinatensystemen mit eingezeichneten Graphen auf einer Tafel nicht zu verwenden. Die Bitmap-Grafiken können fast in jeder beliebigen Größe aufgebracht werden, jedoch ist der Polargraph anfällig für Schwingungen und somit an ein langsames Arbeitstempo gebunden. Außerdem hat der Plotter keinen Mechanismus, um den Stift von der Arbeitsfläche abzuheben. Dies wird bei der vorliegenden Arbeitsweise nicht benötigt. 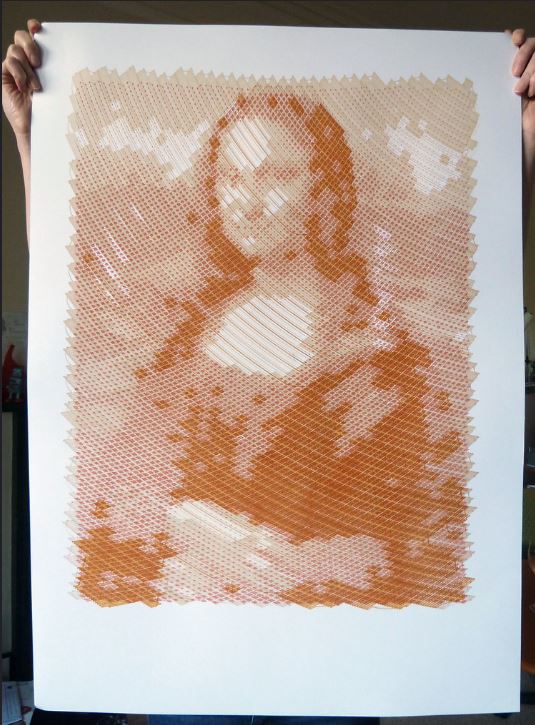 Mit Polargraph erstelltes Bild 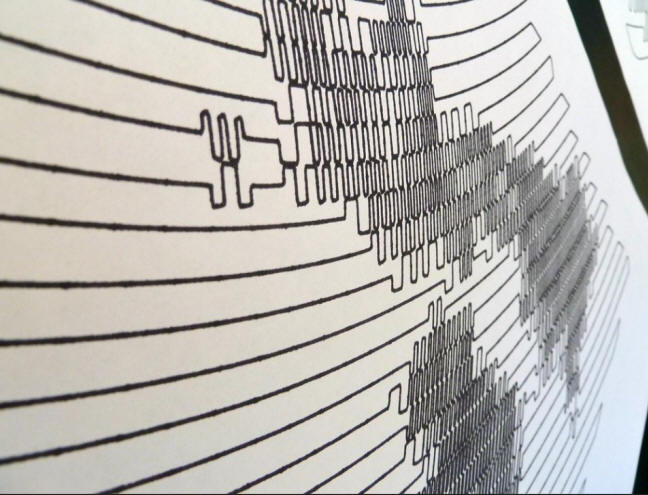 Nahaufnahme eines Polargraph-Bildes Bilder von Flickr 1.4 Seilroboter zur Beschriftung von vertikalen Oberflächen: Hektor Ein Interessanter Ansatz wird vom Entwickler des "Hektor"-Seilplotters verfolgt. Zwar verfügt der Plotter nur über zwei Motoren und eine frei hängende Gondel, stabilisiert seinen Verfahrweg aber durch die Vermeidung von scharfen Richtungswechseln. Hierfür müssen die Grafiken entsprechend aufbereitet werden. Durch diese Wegplanung ist es möglich, den Plotter mit vergleichsweise großer Arbeitsfläche trotz einfacher Mechanik schwingungsarm zu betreiben. Zwar entstehen so viele "Umwege", der Plotter kann aber durch die Vermeidung von scharfen Richtungswechseln trotzdem eine vergleichsweise hohe Arbeitsgeschwindigkeit erzielen. 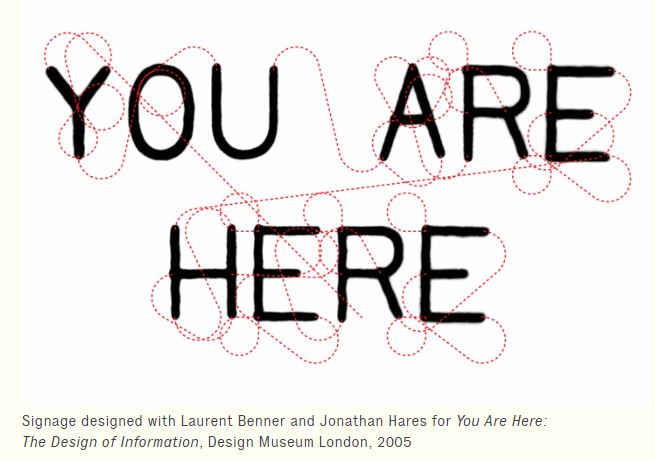 Wegplanung des Hektor-Plotters (Quelle) 1.5 Seilplotter zur Beschriftung von Tafeln mit Kreide: Viktor und Otto Vom Entwickler des Hektor-Plotters gibt es zwei Plotter, die Tafeln mit Kreide beschriften. Der größere Plotter, Viktor, ist für eine Fläche bis 20m*20m ausgelegt. Leider gibt es zu diesen Robotern keine Dokumentation bis auf die Videos und Fotos auf der Website. Die vier Motoren werden von einem eigens für dieses Projekt designten Controller angesteuert.  Viktor-Seilplotter (Quelle) 1.6 Seilroboter zur Beschriftung von vertikalen Oberflächen: Deployable Wall Plotter 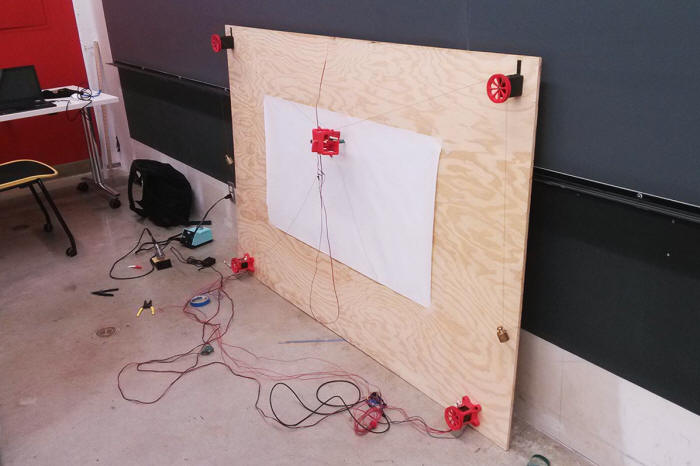 (Quelle) Um die Problematik einer schwingenden Gondel und das Gondelgewicht zu reduzieren, verwendet der "Deployable Wall Plotter" von Nathan Melenbrink kein an der Gondel befestigtes Gewicht. Die Seilwinden befinden sich an den unteren Ecken der zu beschriftenden Fläche, an den oberen Ecken befinden sich Umlenkrollen. Die Gondel wird von 4 Seilen stabilisiert: Zwei aktiv getriebene Seile und zwei Seile, die über die Umlenkrollen laufen und am"losen" Ende mit Gewichten beschwert sind. Die dadurch entstehenden Kräfte variieren mit der Position der Gondel, wodurch der Plotter nicht die komplette Fläche anfahren kann, welche von den Motoren und Umlenkrollen aufgespannt wird. Es ist so jedoch möglich, die Gondel ohne Kontakt zur Wand zu verfahren (bei den meisten Systemen, die mit zwei Motoren und einem Gewicht an der Gondel arbeiten, stützt sich diese an der Wand ab). 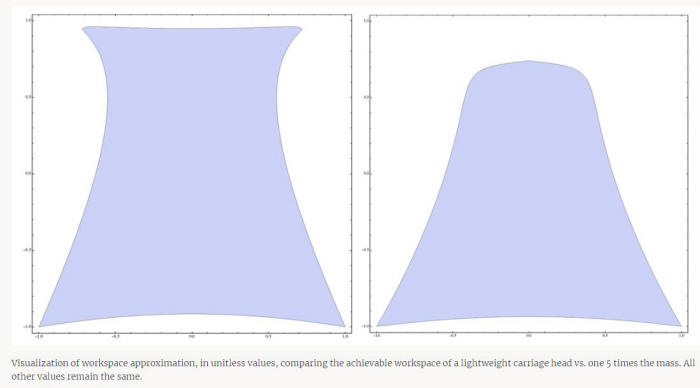 Arbeitsbereich des Plotters (Quelle) 2. weitere 2D-Seilroboter 2.1 2D-Seilroboter-Fräse: Maslow CNC Maslow CNC ist eine Plattenfräse, die auf einem 2D-Seilroboter als Verfahrsystem aufbaut. Da ein hohes Gondelgewicht für einen ruhigen Lauf notwendig ist, werden hier Ziegelsteine zur Beschwerung genutzt. Diese Umsetzung ermöglicht es, eine sehr günstige Lösung zur CNC-Bearbeitung von Holzplatten anzubieten. Die bearbeitbare Fläche ist mit 120 x 240 cm relativ groß. Für CNC-Arbeiten mit Holz, welche keine industrielle Präzision verlangen, ist die Maslow-Fräse mit 450 Dollar wahrscheinlich mit Abstand das günstigste Verfahrsystem in dieser Größe. Die Rechenarbeit der Maslow-Fräse wird von einem Arduino Due übernommen, welcher die zwei Motoren über ein spezielles Shield ansteuert. 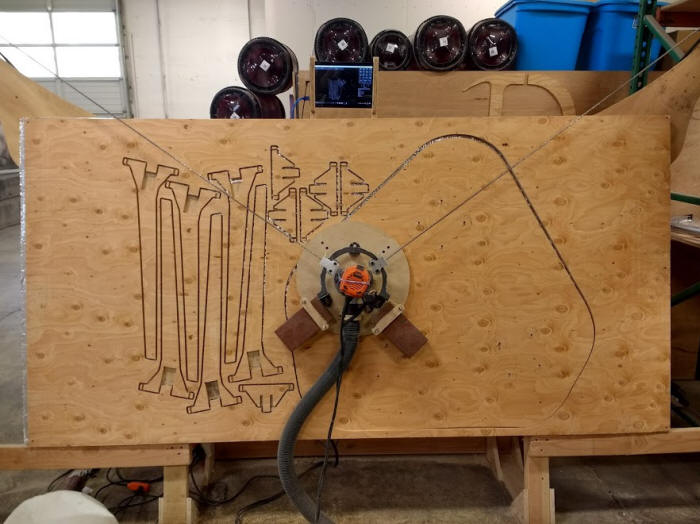 (Quelle) 2.2 Seilkransysteme, beispielweise Konrad WOODLINER In der Forsttechnik kommen Seilkräne zum Einsatz, die aus einem gespannten Tragseil bestehen, auf welchem sich eine Laufkatze bewegt. Das Tragseil wird zwischen zwei Basisstationen gespannt und kann durch Umlenkrollen auch über Strecken gespannt werden, die keine direkte Aufspannung zwischen zwei Punkten erlauben. Die Basisstationen bestehen in den meisten Fällen aus einem LKW, auf dessen Ladefläche ein Mast aufgeklappt oder ausgefahren werden kann. Teilweise sind diese Masten auch an Arbeitsmaschinen montiert, die noch andere Aufgaben erfüllen können, z.B. Harvester. Der Antrieb der Laufkatze erfolgt entweder über Zugseile, welche von einer stationären Winde an der Basisstation angetrieben werden, oder über einen Antrieb, der in der Laufkatze integriert ist. Diese Seilkräne eignen sich, um Baumstämme aus schwierigem Gelände abzutransportieren und sind kostengünstiger als der Einsatz eines Helikopters. Eine hohe Positioniergenauigkeit muss bei diesen Systemen nicht erreicht werden, durch die manuelle Bedienung ist dies nicht notwendig. So kann mit durchhängenden Tragseilen gearbeitet werden, ohne dass die Durchhängung aufwändig modelliert und berechnet werden muss. Das beispielhaft vorgestellte System hat eine Zugkraft von 25-30kN und eine Antriebsleistung von 73,5kW/100PS.  Laufkatze des WOODLINER-Seilkrans mit Last (Quelle) 3. 3D-Seilroboter 3.1 3D-Seilroboter-Kamera: SkyCam Das wohl bekannteste und kommerziell erfolgreichste Seilrobotersystem ist die Spider- oder Skycam. Das Prinzip wurde bereits in den 1980ern patentiert, jedoch erst in den 1990er Jahren wirklich einsatzfähig, da die Computer- und Servomotortechnik bis dahin nicht ausreichend war, um das System richtig zu steuern. Bei der SkyCam handelt es sich um ein Seilroboter-System, welches an der Gondel eine Kamera trägt. Die Kamera ist über ein Gimbal von unerwünschten Schwingungen des Positioniersystems abgekoppelt und kann so auch unabhängig vom Positioniersystem gedreht und geschwenkt werden. Zur Steuerung eines SkyCam-Systems sind mindestens zwei Personen notwendig. Der "Pilot" steuert das Positionierungssystem, also den eigentlichen Seilroboter. Ein Kameramann kümmert sich um die Ausrichtung der Kamera und kann zum Beispiel Zoom und Fokus der Kamera fernsteuern. Für Aufnahmen, bei welchen sich die Kamera über Menschenmengen bewegen muss, wie dies oft bei Sportveranstaltungen der Fall ist, bleibt die SkyCam wahrscheinlich noch für eine gewisse Zeit unabdingbar, da es sich hier um ein sehr sicheres System handelt. Zum Einsatz kommt in den aktuellen Systemen unter anderem ein computergestütztes System zur Kollisionsvermeidung und Überwachung aller kritischen Funktionen. Zwar kam es auch hier schon zu Problemen, jedoch stellt die SkyCam selbst bei einem Absturz ein geringeres Risiko dar, als eine Filmdrohne, da sich an der Gondel der Skycam keine schnell drehenden Rotoren oder feuergefährlichen Akkus befinden. Zudem ist ein Absturz durch die Aufhängung weniger wahrscheinlich.  Gondel eines Skycam-Systems (Quelle) 3.2 Seilroboter in Spiegelteleskopen Die größten Seilrobotersysteme kommen in einer besonderen Bauform von Spiegelteleskopen zum Einsatz. Bei diesen Teleskopen ist ein riesiger Spiegel stationär in einer natürlich vorhandenen Senke installiert. Um nun den abgetasteten Bereich des Himmels zu verändern, wird der über dem Spiegel befindliche Sensor/Empfänger relativ zum Spiegel verschoben. Bei sehr großen Teleskopen dieser Bauform eignet sich ein Seilroboter, da er eine relativ freie Positionierung des Sensors erlaubt und gleichzeitig der Spiegel kaum durch das Positioniersystem verdeckt wird. Die Teleskop-Bauweise ist einigen Bond-Fans aus dem Film "Goldeneye" und Gamern als spielbare Karte aus Battlefield 4 bekannt. Die gezeigten Teleskope sind angelehnt an das Arecibo-Teleskop in Arecibo, Puerto Rico. Die Anforderungen an das Seilrobotersystem sind enorm, so kann (beim Arecibo-Teleskop) die 800 Tonnen schwere Instrumentenplattform auf 3mm genau Positioniert werden, dies wird über eine Positionsregelung der Gondel erreicht.  Das Arecibo-Teleskop (Quelle) Ein neueres, noch größeres Teleskop mit Seilroboter befindet sich in der südwestlichen Provinz Guizhou in China. Das FAST-Teleskop hat einen Hauptspiegeldurchmesser von rund 520m und besitzt somit den derzeit größten Teleskopspiegel der Welt. Der Spiegel kann dynamisch verformt werden, sodass der jeweils genutzte Spielausschnitt mit einem Durchmesser von ca. 300m die Form eines Parabolspiegels annimmt. 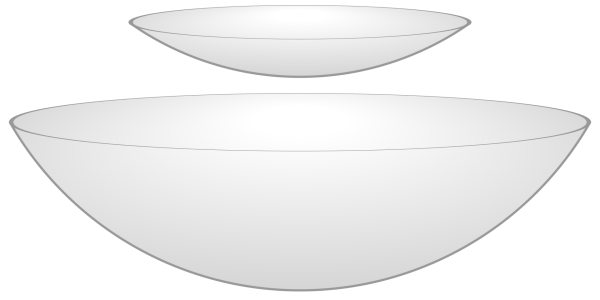 Spiegelflächen des Arecibo- (oben) und FAST-Teleskops (unten) im Größenvergleich (Quelle) Genau genommen besteht das FAST-Teleskop aus zwei unabhängigen Seilrobotern. Der offensichtlichere Seilroboter besteht aus sechs Masten und positioniert die Instrumentenkabine über dem Hauptspiegel. Zur genauen Positionsbestimmung der Kabine wird diese von sechs Laser-Abstandsmessern überwacht. Ein zweites automatisiertes Seilsystem kontrolliert die dynamische Verformung des Hauptspiegels. Der Spiegel besteht aus über 4000 Elementen, welche durch ein Stahlseilgeflecht getragen werden. Einzelne Seile dieses Geflechtes können über Aktuatoren bewegt werden, wodurch sich der Spiegel verformt. Die Position der einzelnen Elemente wird dabei von Messkameras millimetergenau überwacht. 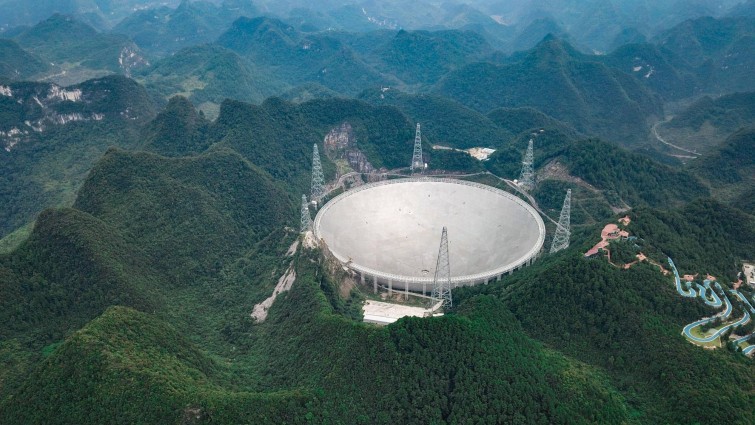 FAST-Teleskop (Quelle) 3.3 Seilroboter als VR-Simulator des MRI Tübingen Das Cyberneum des Max Planck Institutes in Tübingen befasst sich mit VR-Technologie. Dort wurde ein Seilroboter gebaut, in dessen Gondel sich ein Sitzplatz für eine Person befindet. Dank der hohen Windenleistung von 348kW können Beschleunigungen bis 1,5g erzielt werden. Der Seilroboter kann als Simulator, beispielsweise für Flug- und Fahrsimulatoren, genutzt werden. Hierfür steht dem Passagier ein drahtloses VR-System zur Verfügung. Der Roboter kann 6 Freiheitsgrade (in gewissen Grenzen) abbilden. Der Roboter besteht aus 8 Seilwinden mit Drahtseilen, an welchen eine Gondel befestigt ist. Diese wiegt dank Carbon-Leichtbau nur 80kg (reines Gondelgewicht ohne Elektronik), so wird ein Leistung/Gewichts-Verhältnis 2,6kW/kg erreicht. Die Nutzlast des Systems beträgt 200kg, die Gondel kann in einem Raum von 4m*5m*5m bewegt werden und um die Achsen bis zu ±40º, ±40º, ±5º (Roll, Nick, Gier) gedreht werden. Der Roboter wurde im Bezug auf Stabilität und dynamische Bewegung optimiert und ist bis jetzt der einzige manntragende Seilroboter-Simulator. 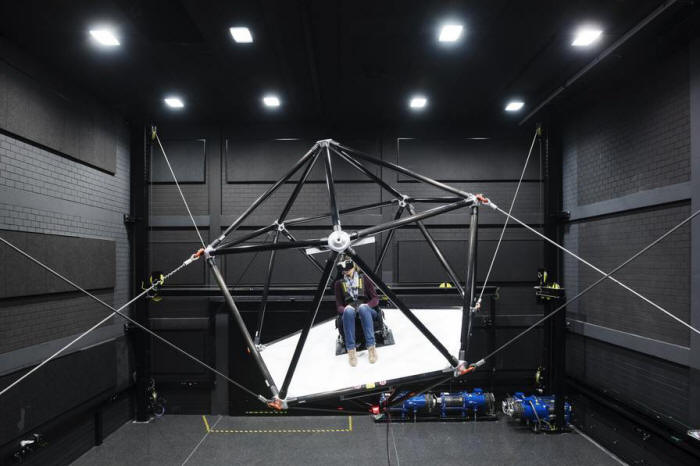 Aufbau des Simulators, die blauen Winden sind rechts unten zu sehen (Quelle) 3.4 Messe-Demonstrator von B&R Automation: CableEndy CableEndy wurde als Eyecatcher für die internationale Maschinenbaumesse MSV in Brünn (CZ) im Rahmen einer Masterthesis an der Universität Brünn entwickelt. Es handelt sich um einen auf hohe Geschwindigkeit und Beschleunigung optimierten Seilroboter, der mit einem Tennisball jonglieren kann. Der Roboter erreicht Beschleunigungen von 10g und eine Endgeschwindigkeit von 6m/s, er kann die Gondel in sechs Freiheitsgraden bewegen, hierfür kommen 8 Seilwinden zum Einsatz. Die Steuerung übernimmt ein Microcomputer, der über Motortreiber acht Motoren ansteuert, welche über mechanische Bremsen verfügen. Die Positioniergenauigkeit variiert von 1mm in der Mitte bis 5mm am Rande der Maschine. Ein ähnlicher Roboter wurde unter dem Namen SEGESTA ARTIST an der Universität Duisburg-Essen entwickelt. 3.5 Seilkransystem für verschiedenste Anwendungsbereiche: NIST Robocrane Das Robocrane-Projekt des NIST (National Institute of Standards and Technology, USA) wurde als kommerziell einsetzbare 3D-Seilkranplattform entwickelt und kann für verschiedenste Aufgaben konfiguriert werden. Er besteht aus dem Seilroboter zur Positionierung der Gondel, an welcher sich ein- oder mehrer Roboterarme befinden. Der Seilroboter wurde von zwei Meter, über 6 Meter, bis hin zu einer Größe getestet, bei der es möglich ist, eine Arbeitsplattform für Werftarbeiter im Trockendock durch eine Werfthalle zu bewegen (Flying Carpet).  Modell des "Flying Carpet" (Quelle) Das Robocrane-Projekt wird seit über 15 Jahren vorangetrieben und hat Seilroboter für die unterschiedlichsten Anwendungsgebiete entwickelt und getestet. Hier spielt beispielsweise auch die Anwendung in Untersee oder im Weltraum eine Rolle. In solchen schwer zugänglichen Regionen können Seilroboter zur Kostensenkung beitragen, da sie sich vergleichsweise schnell umkonfigurieren lassen und so für viele verschiedene Aufgaben genutzt werden können. Durch die Verwendung natürlicher Strukturen, an welchen die Winden montiert werden können, kann das Gesamtgewicht des Seilroboters niedrig gehalten werden, was vor Allem im Space-Bereich für eine hohe Kosteneffizienz sorgt. Folgende Konzepte und Anwendungsgebiete wurden untersucht (Quelle): Dual Manipulators Gantries Grinding Gripping/Barrel Grabbing Inspection Material Handling Pipe/Beam Fitting Sawing Welding Robot Calibrator 8-Cable RoboCrane Stone Carving Air Craft Maintenance Air Transportable Expeditionary Crane (ATEC) Bridge Construction Lunar Rover Machining Off-Shore Cargo Handling Ship Building Undersea Configurations Waste Clean-up Oil-Well Fire Fighting 3.6 Fraunhofer IPA (Stuttgart): IPAnema Das Fraunhofer Institut für Produktionstechnik und Automatisierung IPA entwickelt die IPAnema-Seilroboter-Reihe. Seit Beginn der Forschungen wurden verschiene Seilroboter entwickelt, meist entweder zu Forschungszwecken oder zum Einsatz als Manipulator, z.B. für automatisierte Regalsysteme. Interessant ist hier beispielsweise die Verbindung eines Seilroboters mit einem Kraftmesssystem, um den Roboter auf "natürliche" Weise mit der Hand bewegen zu können. Vom IPA werden außerdem Seilwinden entwickelt, die speziell auf den Einsatz in Seilrobotern ausgelegt sind. So enthalten diese zum Beispiel ein integriertes System zur Seilkraftmessung. 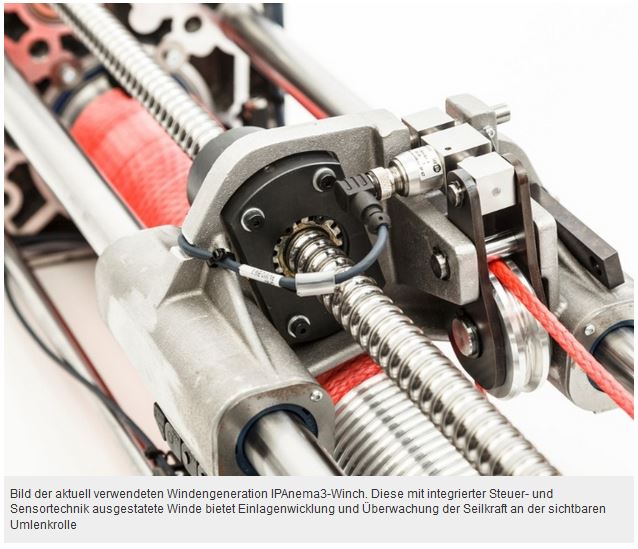 (Quelle) 3.7 andere Bauweisen: beispielhaft RoboCatheter Mit der Bauweise des kabelgesteuerten Parallel-Roboters lassen sich auch ganz andere Bauarten und Kinematiken realisieren, auf welche hier Aufgrund der hohen Differenz zum vorhandenen Projekt nur kurz hingewiesen wird. Durch Kopplung der Seile an lineare oder rotatorische Achssysteme ist es möglich, die Antriebseinheit von der Mechanik räumlich zu trennen. Dies bietet zum Beispiel in der Medizin einige Vorteile (z.B. Platzbedarf, Hygiene). Als Anwendungsgebiete für kommerziell entwickelte Systeme bieten sich zudem beispielweise: -Bühnentechnik (Quelle) -Tests dynamischer Sensoren, z.B. Gyroskope (Quelle) -hochdynamische Manipulatoren (Quelle) -Regalbediensysteme (Quelle) -Aufhängungen im Windkanal (Quelle) Interessante Anwendungen werden zudem erschlossen, wenn eine hängende Gondel durch den Seilroboter kontrolliert in Schwingung versetzt wird. Somit kann der Seilroboter auch Bereiche anfahren, die durch konventionelle Steuerungen nicht erreichbar wären. 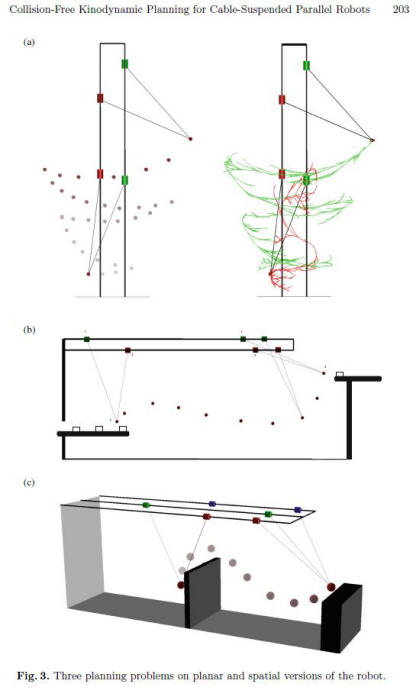 (Quelle: Randomized Kinodynamic Planning for Cable-Suspended Parallel Robots Ricard Bordalba(B), Josep M. Porta, and Llu´ıs Ros, Cable Driven Parallel Robots, Seite 203) |
| Mit Unterstützung von Prof. J. Walter | Sommersemester 2019 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
#/media/Datei:Comparison_FAST_Arecibo_Observatory_profiles.svg){kind=link}
{kind=link}
{kind=link}
{kind=link}