|
Ausgewählte Lösung bzw. Experimentalfahrzeug
von vorne
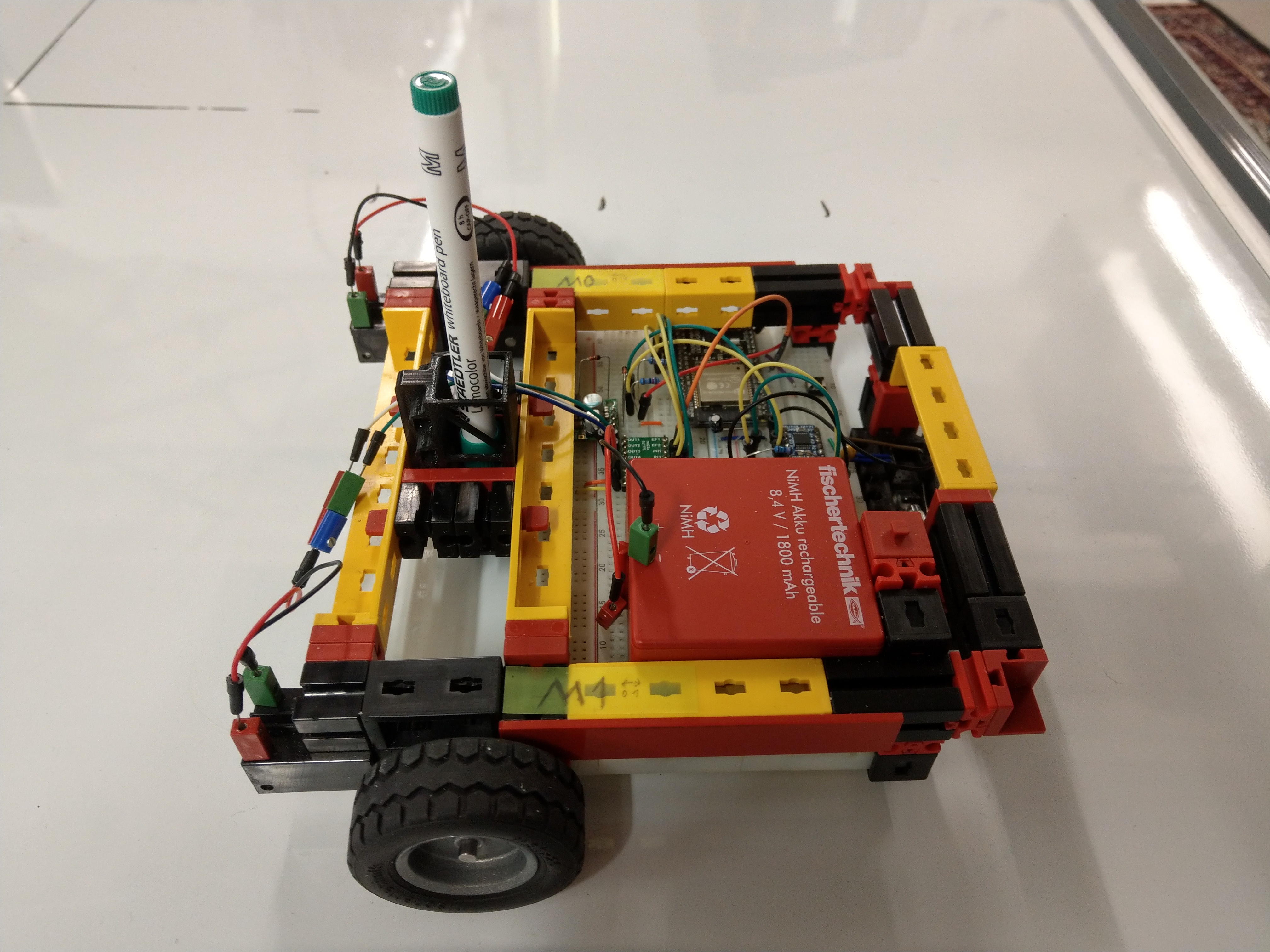
Ausgewählte Lösung bzw. Experimentalfahrzeug
von vorne
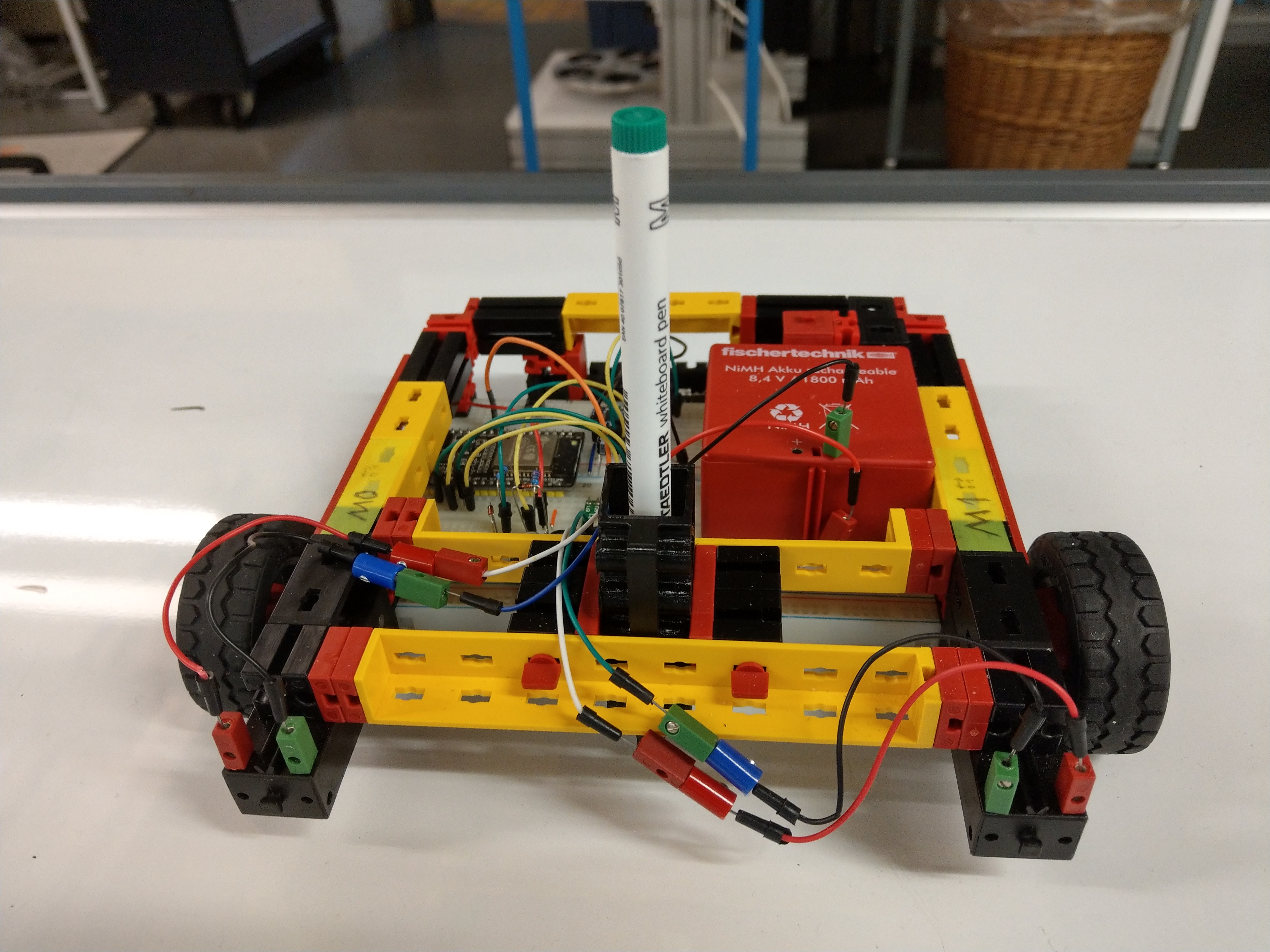
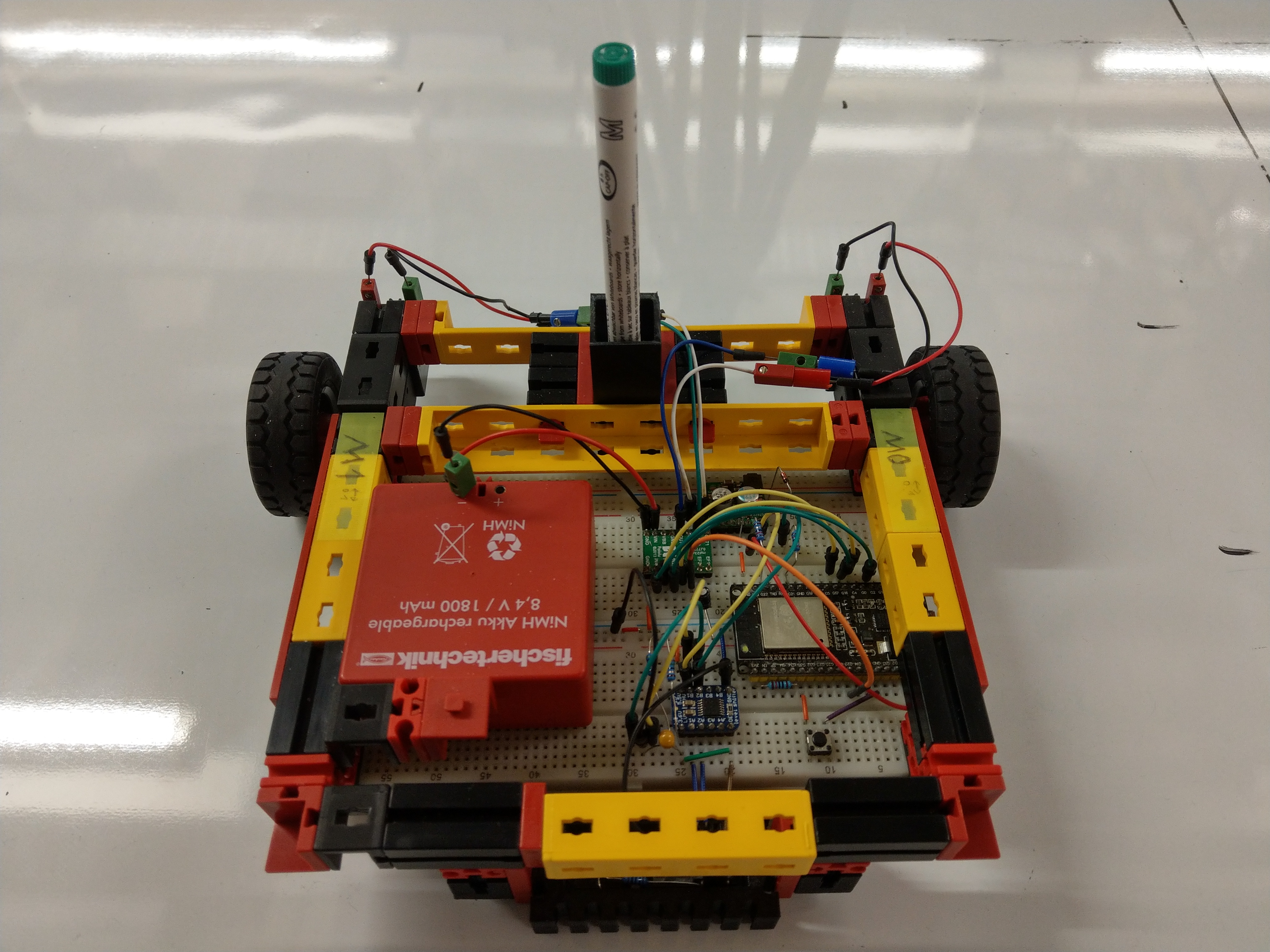
Ausgewählte Lösung bzw. Experimentalfahrzeug von hinten

Ausgewählte Lösung bzw. Experimentalfahrzeug von oben
Die ausgewählte Lösung besteht in diesem F&E-Projekt aus einem
Steckbrettaufbau, welches in einem Rahmen aus
Fischertechnikbauteilen eingespannt ist. Eine Liste aller für den
Steckbrettaufbau benötigten Bauteile sowie der zur Verdrahtung
notwendige Schaltplan befinden sich in den Unterkapiteln
Konzeptentwicklung
bzw. Schaltplan. Da es unser
Ziel war, einen Prototypen zu bauen, mit dem wir das Verhalten
und die Genauigkeit des Sensors auf unterschiedlichen
Oberflächen untersuchen können, hat sich dieser Aufbau aufgrund
der hohen Flexibilität bezüglich der Verdrahtung und Anbringung
der Bauteile, am meisten angeboten.
Für den Sensor und die LED wurde anfangs noch der Unterboden der
Microsoftmaus verwendet. Jedoch war deren Installation am
Fahrzeug relativ schwierig, da die Kompatibilität zu den
Fischertechnik-Bauteilen nur sehr eingeschränkt war. Aus diesem
Grund wurden kurzerhand der Sensor und die LED ausgelötet und
eine eigene Maussensoraufnahme konstruiert, welche vor allem die
für die Installation benötigten und zu den
Fischertechnik-Bauteilen kompatiblen Nuten verfügt, sowie an
dessen Unterseite einen der Füße der als Spender fungierenden Computermaus
verwendet.
Aufgrund Letzterem sind vorne in der Regel keine weiteren Räder
oder dergleichen notwendig. Je nach Oberfläche könnten diese
aber dennoch von Nutzen sein, weshalb links und rechts von der
Sensoraufnahme insgesamt zwei Kugelrollen installiert wurden,
die bei Bedarf weiter unten platziert werden können.
Durch einen vor dem Experimentalfahrzeug gebauten Prüfstand als
auch durch diverse Testfahrten, von denen die wesentlichen
ebenfalls in der
Konzeptentwicklung zu finden sind, konnten wir viele
wichtige Erkenntnisse über die für den Betrieb notwendigen
Kalibrierfaktoren und die Sensorplatzierung bzw. dessen Höhe
über der Oberfläche gewinnen. Das Verhalten des Sensors variiert
teilweise sehr stark von Oberfläche zu Oberfläche. Dies
bedeutet, dass je nach Oberfläche sowohl die Höhe des Sensors
als auch die Kalibrierfaktoren angepasst werden müssen. So war
es beispielsweise notwendig, auf weißem Papier den Sensor weiter
unten zu platzieren, da dieser ansonsten gar nichts mehr
gemessen hat. Auf anderen Oberflächen hingegen wie etwa den im
Labor befindlichen Tischen (hellgraue, leicht raue Oberfläche)
und auf dem Whiteboard hat der Sensor auch mit der
ursprünglichen Höhe funktioniert. Nur eine Anpassung der
Kalibrierfaktoren war je nachdem nötig. Schließlich hat sich
ebenso herausgestellt, dass der Sensor auch nach dem Herabsetzen
auf den anderen Oberflächen weiterhin funktioniert.
|