|
Dieses F&E-Projekt hat gezeigt, dass ein Maussensor das Potential
zur relativen Positionserfassung an einem Kleinfahrzeug hat.
Mit
diesem Projekt wurden erste Funktionen erstellt und getestet, um
den Maussensor mit der gegebenen Elektronik anzusteuern, sowie um
das vorhandene Experimentalfahrzeug geregelt fahren zu lassen.
Herausforderungen bei diesem Projekt waren anfänglich herauszufinden
welche Maussensoren die Anforderungen erfüllen können, und
anschließend die Beschaffung dieser. Der direkte Kontakt zu
Herstellern der Sensoren bzw. von PC-Mäusen hat sich leider trotz
eigener Kontaktaufnahme nicht
ergeben.
Bei der Untersuchung mehrerer Mäusen auf verschiedenen
Untergründen wurde der
PAW3204-Sensor ausgewählt, da dieser auch auf dem Whiteboard
zuverlässig funktioniert hat.
Nach anfänglichen Problemen ist es
uns gelungen eine sichere Datenverbindung zwischen dem Sensor und
dem ESP32 herzustellen. Dafür wurde ein Softwareclock
erstellt, da der Sensor selbst serielle Schnittstellen wie I²C oder
SPI nicht unterstützt.
Da in diesem Projekt ein erster Prototyp aufgebaut wurde, sind noch
viele Weiterentwicklungen möglich:
Zum einen kann die Elektronik
zur Ansteuerung des Sensors in ein kompaktes Modul zusammengefasst
werden, welches zum bisherigen FT32-Controller für
Fischertechnik-Roboter kompatibel ist. Idealerweise wird dafür ein
zusätzlicher Controller verwendet, welcher zwischen dem Maussensor
und dem ESP32 kommunizieren kann.
Auch kann ein solches
Sensormodul in die Cody++ - Oberfläche integriert werden. Somit wird
es für Anwender möglich, auf einfache Art den Sensor zu
programmieren und zu nutzen.
Angepasst auf ein vorgegebenes
Fahrzeug ist auch eine zeichnerische Vorgabe möglich, welche das
Fahrzeug mithilfe des Sensormoduls nachzeichnen kann.
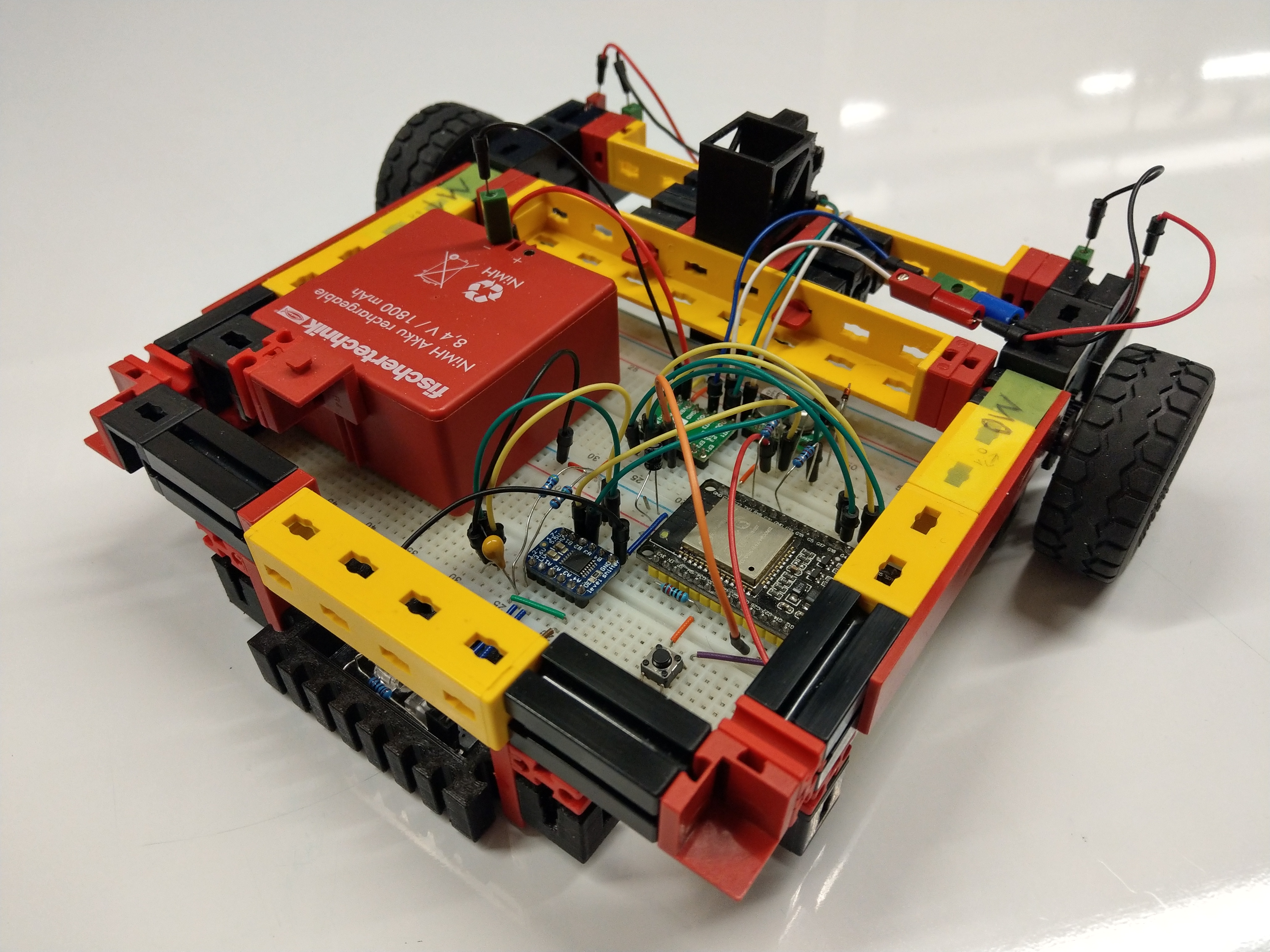
Fertiges Experimentalfahrzeug
|