AufbauDer
Leddar M16 ist ein Laserabstandsmesser, der Firma
LeddarTech, der 16 Sensoren
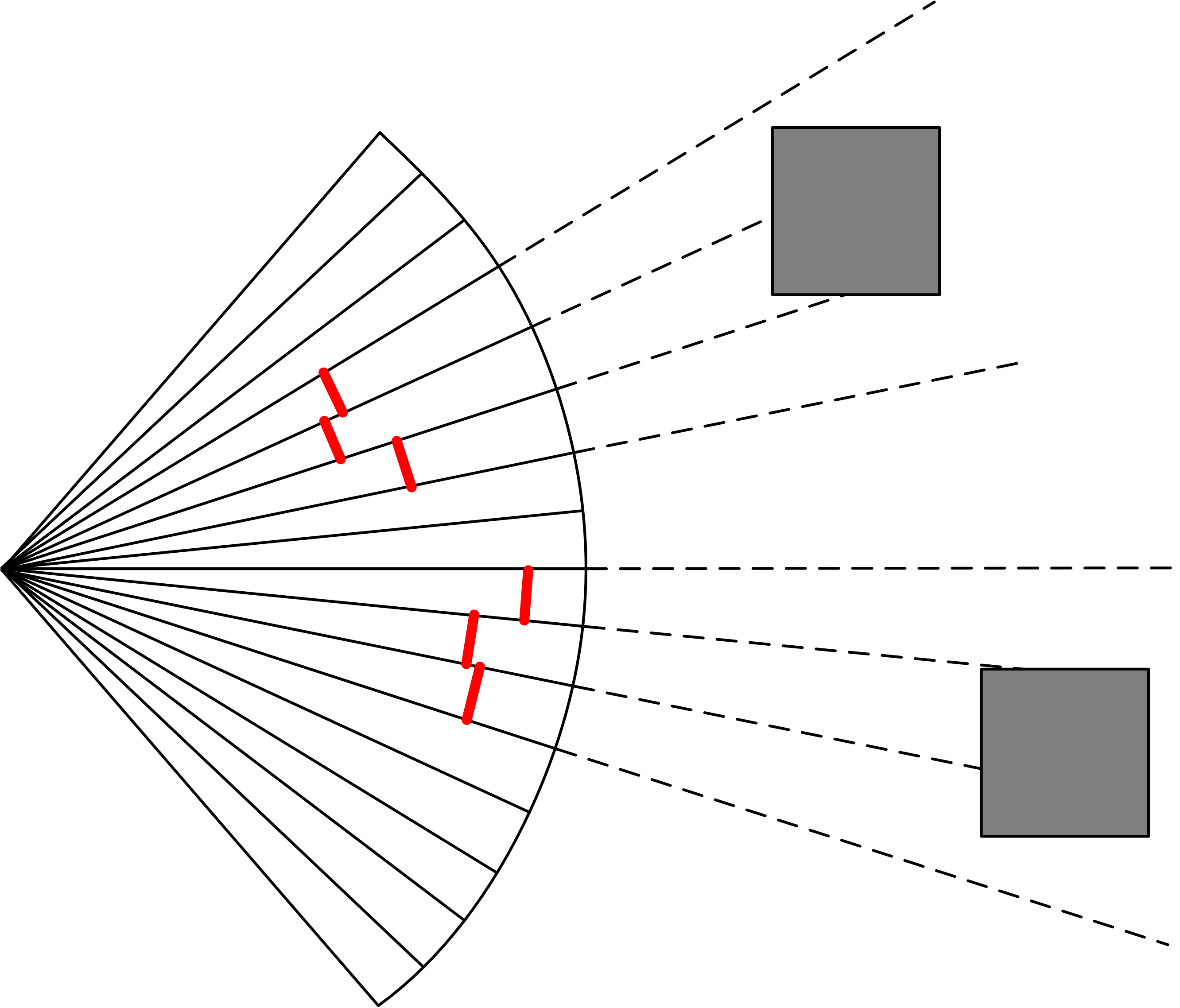
in einem Modul beinhält. Die 16 Erfassungsbereiche spannen einen
Kegel von 9°, 18°, 24°, 34°, 45° oder 95° auf, je nach Modul. Für
diese Arbeit wird der Sensor mit einem 95° Messbereich verwendet.
Die Messung erfolgt für alle Segmente parallel. Um diese Aufgabe
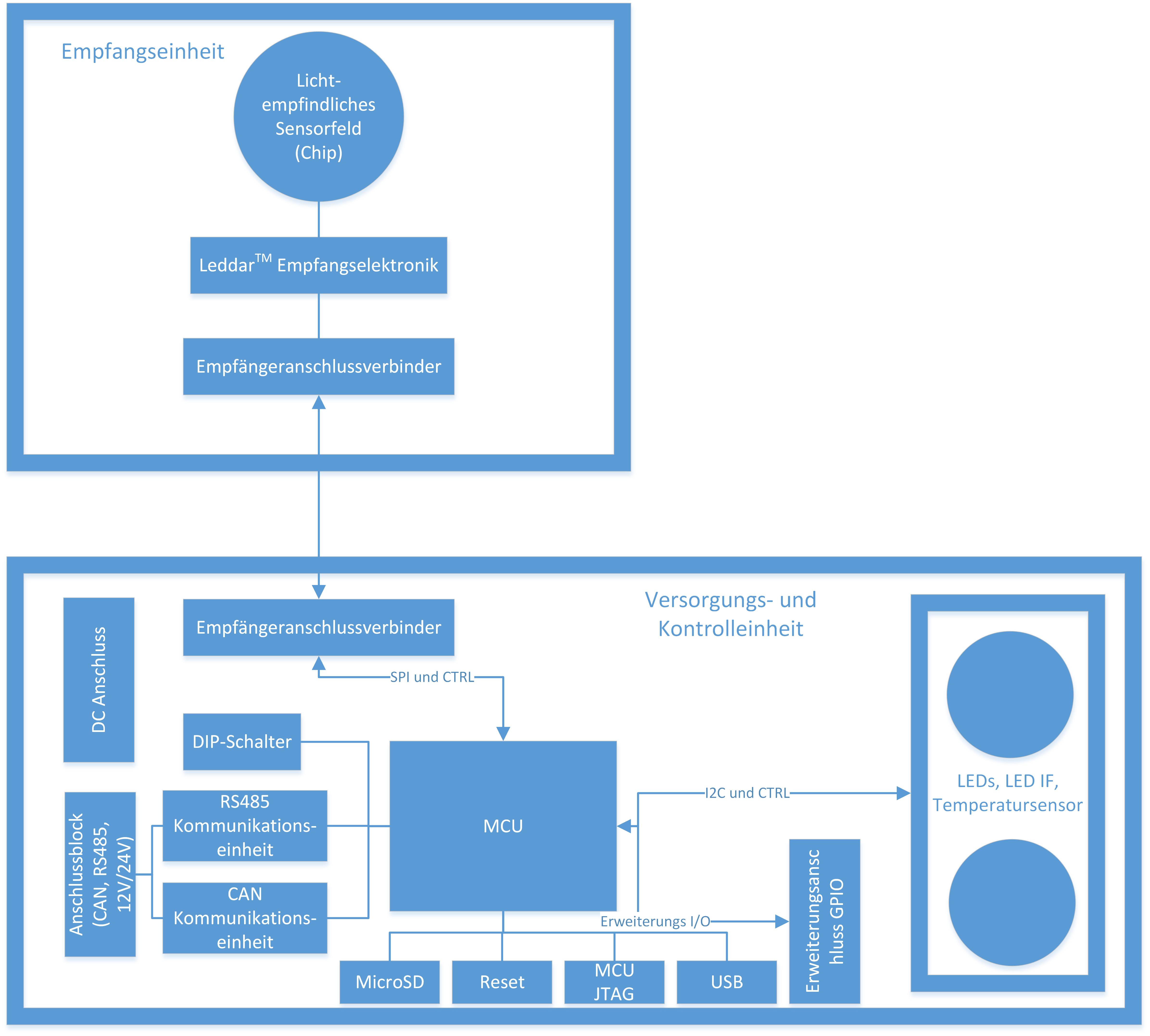
zu erfüllen besteht das Modul aus drei primären Komponenten. Einer
Sendeeinheit, die durch Laser LEDs Lichtimpulse aussendet. Über
eine entsprechende Optik wird das Licht auf zwei mal acht Segmente
aufgefächert, die jeweils 45° abdecken. Die zweite Komponente ist
die Empfangseinheit. Hierbei handelt es sich um ein Weitwinkelobjektiv,
das die reflektierten Lichtstrahlen auffängt und auf einen Lichtempfindlichen
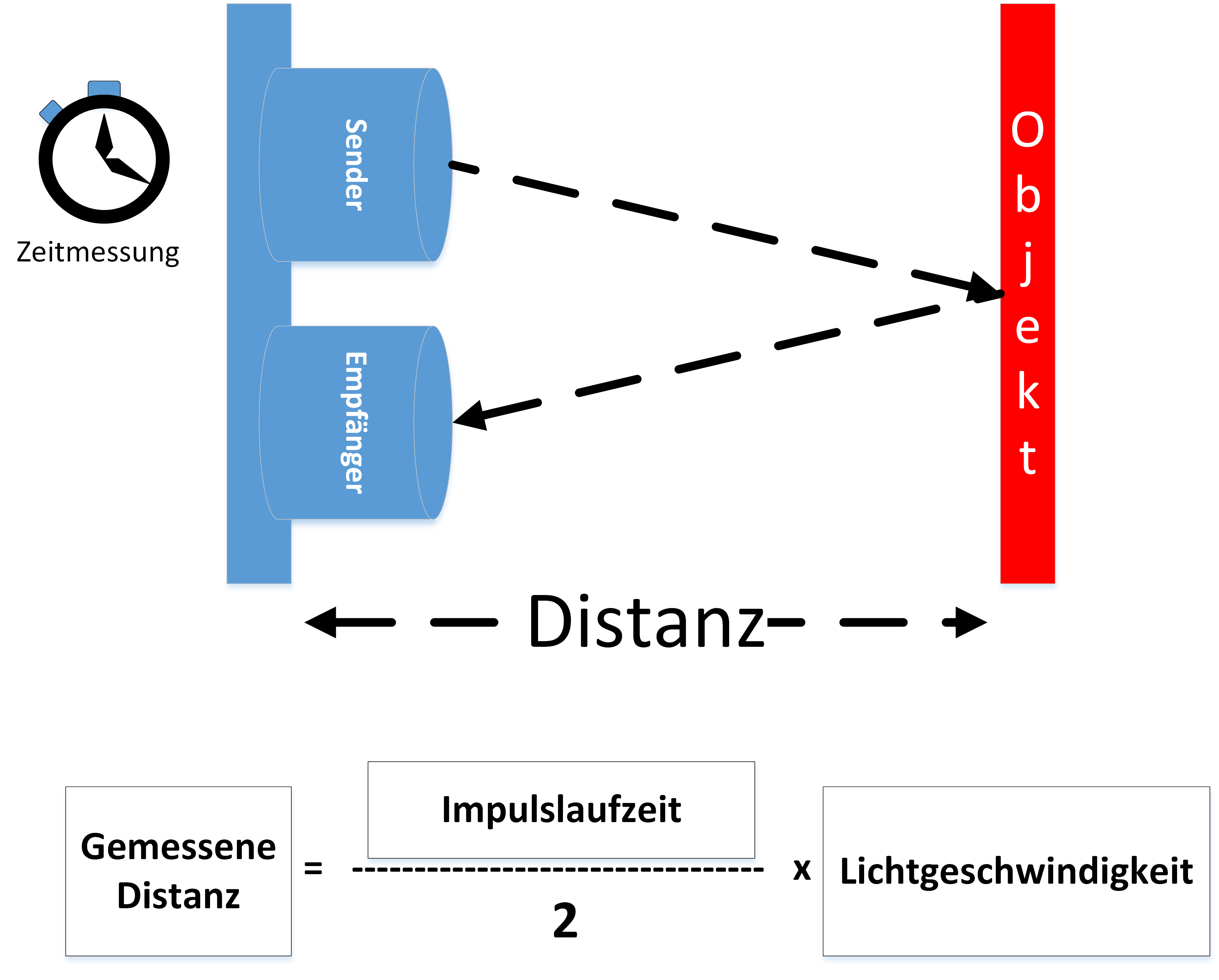
Photochip leitet. Die dritte Komponente ist die Auswerte- und Steuerungselektronik.
Sie misst die Zeit vom Aussenden des Impulses bis zu dessen Rückkehr
durch Reflektion und überführt die gemessene Zeit in eine Abstandsinformation.
Anschließend werden die Daten durch optionale Filter- und Glättungsalgorithmen
verfeinert und auf den verschiedenen Schnittstellen ausgegeben.
Zum abrufen der Daten stehen USB, Serial und CAN zur Verfügung.
Außerdem verfügt das Modul über diverse GPIO Erweiterungsports nutzbar
für UART, CAN1, SPI1, GPIO1, DAC1. DIP-Schalter und einer Programmierschnittstelle.
Die Versorgung ist mit 12V oder 24V variabel und wird über Jumper
eingestellt. Der prinzipielle Aufbau ist in Abb. 1 nochmals verdeutlicht.
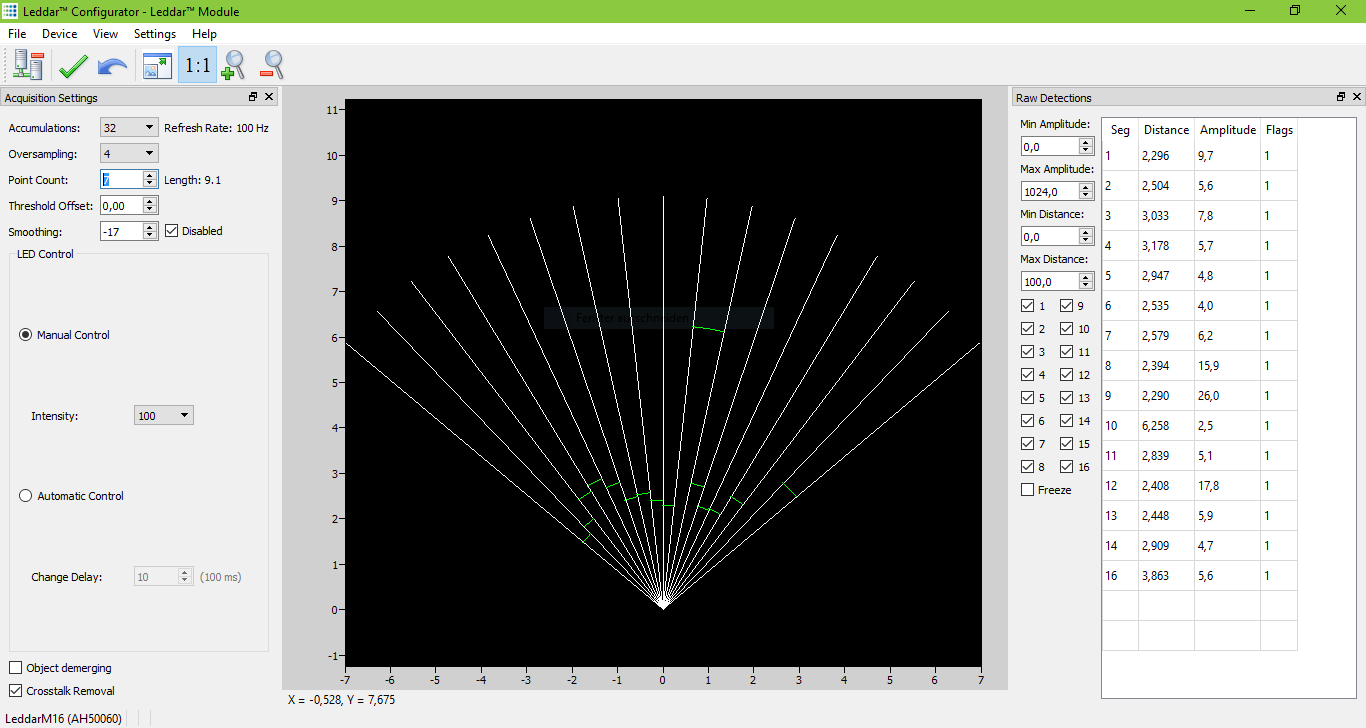
Das zugehörige Konfigurationsprogramm erlaubt es den Sensor zu parametrieren.
Dadurch kann beispielsweise die Abtastrate, Mittelwertsbildung und
die Lichtintensität der LEDs eingestellt werden.