|
|
Forschungs- und Entwicklungsprojekt 16ws_WA_Sensorarray |
Wintersemester 2016/2017 Robin Tenscher-Philipp Tim Schanz |
|
||
|
|
Forschungs- und Entwicklungsprojekt 16ws_WA_Sensorarray |
Wintersemester 2016/2017 Robin Tenscher-Philipp Tim Schanz |
|
||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die Auswertung der Messreihen erfolgt über die Kennzahlen Cg und Cgk des Messfähigkeitsnachweises |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
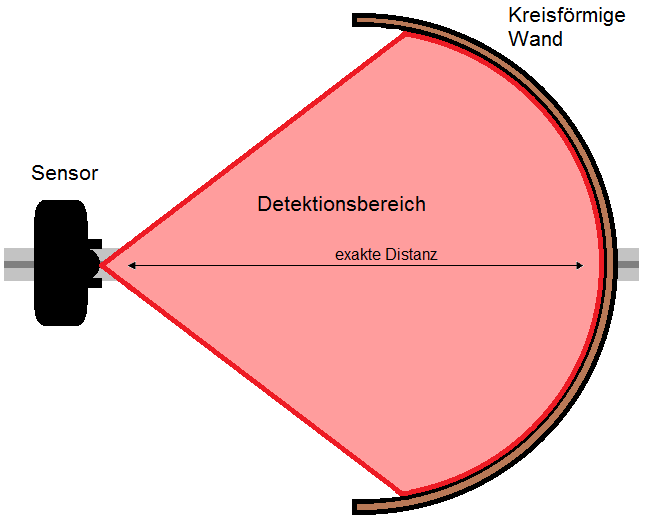
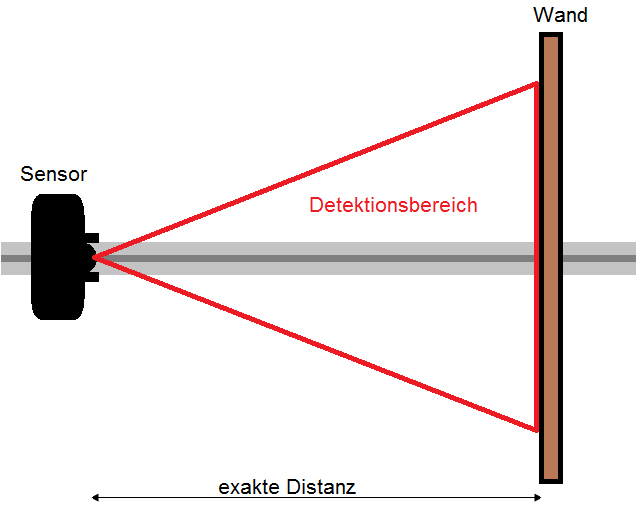
Der Sensor hat einen radialen Erfassungsbereich über 95° der ins 16 Segmente á 5,93° unterteilt ist. In den vorgenommenen Messungen wird jedoch immer gegen eine Ebene Wand (Abb.17) und keine dem Sensor angepasste Halbschale (Abb.18) gemessen. Daher ist es notwendig für alle Segmente eine Längenkorrektur der gemessenen Distanz zu bestimmen um somit eine Projektion auf die gemessene Ebene zu erhalten. Die Umrechnungsfaktoren abhängig von jeweiligen Segment sind in nachfolgender Tabelle (Tab.1) dargestellt. Die tabellarische Auswertung der einzelnen Messreihen nutzt diesen Korrekturfaktor und die Segmente auf den Prüfabstand(Normal) zu skalieren. Zur Berechnung wird hauptsächlich die folgende Formel verwendet (Abb.16). Hierbei beschreibt der „Sensorwert“ die gemessene Distanz und das „Lot“ den exakten Abstand als Lotgerade. Alpha beschreibt den jeweiligen Winkel zwischen Segment und Lotgerade. 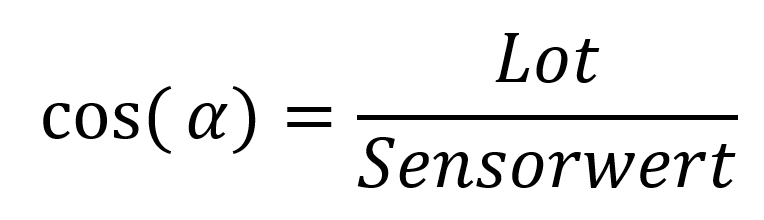
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die einzelnen Messungen sind anhand der nachfolgenden Tabelle spezifiziert. Dieser können die Messumstände und die Rahmenbedingungen entnommen werden. Im Gesamten ergibt sich daraus 60 Messreihen, á 16 Segmente, á 50 Werte = 48000 ausgewertete Distanzen. |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
In Nachfolgenden sind exemplarisch einige Messreihen aus obiger
Tabelle dargestellt. Am Ende dieser Seite sind sämtliche Auswertungen
als Download verfügbar. Das erste Tabellenblatt einer Messreihe
gibt einen Gesamtüberblick über den Cg und Cgk aller Segmente innerhalb
einer Messung. Die folgenden Tabellenblätter beinhalten die detaillierten
Auswertungen jedes einzelnen Segmentes und die dazugehörigen Daten.
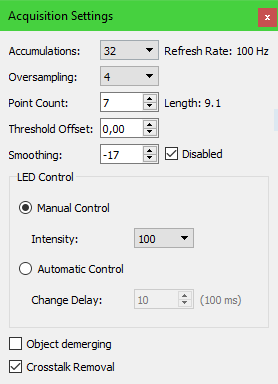
Die im folgenden Bild (Abb.19) dargestellten Parameter wurde für alle Messreihen
verwendet.
Messreihe 1 Laboraußenwand 1

Messreihe 10 Halle 1

Langzeitmessung Die Nachfolgende Messung erfüllt nicht die Voraussetzungen zur Erfassung von Messwerten nach MSA-Vorgabe. Der Sensor wird nicht zwischen den einzelnen Messwerten neu referenziert sondern mehrere Messwerte vom Sensor hintereinander abgerufen. Außerdem wurde die Interne Mittelwertbildung auf 16 Mittelwerte eingestellt.
Fazit der Messfähigkeitsanalyse
Der Hersteller des Sensors gibt die Auflösung des Sensors mit etwa einem Zentimeter an. Der Sensor bietet jedoch die Möglichkeit die Messwerte im Bereich von Millimetern über Zentimeter und Dezimeter bis hin zu Metern abzurufen. Entsprechend der Einstellungen werden Nachkommastellen abgeschnitten. Wird der Sensor also entsprechend der vom Hersteller spezifizieren Zentimeter eingestellt kann bei einem geringen Abstand wie Beispielsweise einem Meter keine Messfähigkeitsanalyse durchgeführt werden. Die Messwerte springen hier lediglich zwischen zwei Werten, wodurch die Streuung zu gering ist um Aussagen über die Fähigkeit des Systems machen zu können. Um überhaupt eine Analyse durchführen zu können, wird der Messwertebereich auf Millimeter gestellt. Dies führt dazu, dass eine gewisse Streuung durch Ungenauigkeiten entsteht und somit eine Auswertung ermöglicht. Die oben dargestellten Messungen wurden mit den zuvor erwähnten Einstellungen durchgeführt. Mit den entsprechenden Winkelkorrekturfaktoren können alle Segmente auf den Normalenabstand skaliert werden. Es zeigt sich jedoch, dass das System weder bei kurzen(1000 mm) noch bei mittleren(ca. 12000 mm) Distanzen als vollständig fähig klassifiziert werden kann. Ein wesentlicher Grund hierfür ist der zufällige Offset. Dieser Offset ist recht hoch und liegt bei einem Meter liegt dieser bei etwa +/- 4 Zentimeter. Bei der Messfähigkeitsanalyse ist es außerdem notwendig immer nur ein Messwert abzuholen, den Sensor anschließend auf der Schiene neu zu referenzieren und erst danach einen neuen Messwert abzuholen. Dies führt zu einer Streuung. Um die Streuung zu verringern benötigt der Sensor über die interne Mittelwertsberechnung und die Optimierungsalgorithmen mehrere Iterationen um die Distanz genauer bestimmen zu können. Dies zeigte sich bei einigen Langzeitmessungen. Wie in der Information oberhalb der Messung angegeben entspricht die Messwerterfassung nicht den Richtlinien der MSA. Da der Sensor nicht zwischen jeden Messungen neu referenziert wird. Es zeigt sich jedoch, dass wenn mehrere Werte hintereinander Abgerufen werden und die Mittelwertsbildung aktiviert ist der Sensor als fähig klassifiziert werden kann. Das bedeutet Cg liegt oftmals weit über 1.33 und die Streuung ist somit sehr gering. Hingegen erreicht der Kennwert Cgk nicht die Erfordernisse, da der Offset des Sensors dazu führt, dass die Messwerte nicht zentriert innerhalb der Grenzen liegen. Ein weiterer Aspekt der sich auf den die Messdaten auswirkt sind Umgebungseinflüsse. Im besonderen Beleuchtung. Der Sensor arbeitet mit einer Wellenlänge von 940 nm im Infrarotbereich. Wenn während der Messwerterfassung eine externe Infrarotquelle in diesem Wellenlängenbereich auf den Sensor einstrahlt ändert sich die ermittelte Distanz der jeweils betroffenen Sensorsegmente. Der Nachweis erfolgte hier durch die Verwendung einer herkömmlichen TV Fernbedienung. Richtet man die Fernbedienung auf den Sensor während der Messwerterfassung und betätigt Knöpfe auf der Fernbedienung springt die gemessene Distanz des Sensors. Ebenfalls relevant ist, dass der Hersteller den Sensor für eine Distanz zwischen 0 und 100 Metern bei einer Genauigkeit von +/- 5 Zentimetern spezifiziert. Es wird keine Aussage darüber gemacht inwiefern die Genauigkeit mit der Distanz abnimmt bzw. sich ändert. Da nichts anderes bekannt ist, wurde diese Genauigkeit als oberer und unterer Grenzwert für die Analyse für alle Distanzen festgelegt. Im Bereich von einem Meter wird die spezifizierte Genauigkeit eingehalten, was anhand der ersten exemplarischen Messreihe abzulesen ist. Jedoch bei mittleren Distanzen von etwa 12 Metern kann diese schon nicht mehr eingehalten werden. Weniger Auswirkungen haben die Oberflächen bzw. die Oberflächenstruktur im Erfassungsbereich des Sensors. Geprüft wurden Oberflächen wie Beton, Metall, Tapeten, Spiegel, LCD-Panels usw. Es zeigte sich dass die Farbe keine messbaren Auswirkungen auf die gemessene Distanz hat. Weiterhin spielen geringe Unebenheiten, Beispielsweise bei einem gewellten Garagentor nur eine geringe Rolle. Viel relevanter ist hier die Reflektanz der Oberfläche. Stark reflektierende Oberflächen führen entweder zu fehlerhaften Messungen oder zum Erfassungsausfall des jeweils betroffenen Segments. Erkennt der Sensor eine Fehlerhafte Messung wird der Messwert nicht mehr ausgegeben. Die vom Hersteller angegebene Messdistanz von 0 bis 100 Metern konnte ebenfalls nicht nachgewiesen werden. Schon bei etwa 20 Metern können einzelne Segmente nicht mehr detektiert werden. Der Sensor gibt entsprechend eines Time of Flight Sensors Infrarotlichtimpulse aus. Anhand der Signallaufzeit wird die Distanz bestimmt. Ist das vom Objekt reflektierte Licht jedoch zu schwach, bzw. die Amplitude der Welle zu gering kann keine Messung mehr erfolgen. Der Sensor bietet zwar die Möglichkeit die ausgesandte Amplitude manuell festzulegen, dies reicht bei 100% Leistung jedoch kaum aus um Distanzen über 20 Metern zu bestimmen. An dieser Stelle weicht die Spezifikation stärkt von der Wirklichkeit ab. Die genannten Faktoren sind ausschlaggebend für den Nachweis eines fähigen Messsystems, wodurch der Sensor nicht als fähig klassifiziert werden kann. Die größte Problematik stellt hierbei der variable Offset dar. Die Messwerterfassungsfrequenz, bzw. das Abrufen der Messwerte könnte beim Einsatz des Sensors so optimiert werden, dass die Streuung verringert werden kann. Es bleibt jedoch der unbekannte Offset Anteil durch Umgebungseinflüsse. Weiterhin muss die Genauigkeit prozentual an die gemessene Distanz angepasst werden um einen Fähigkeitsnachweis für gewisse Einsatzbereiche erbringen zu können. |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ishikawa-Diwagramm
Als Folge der Messungen und der Tests wurde das nachstehende Diagramm (Abb.22) erstellt. Es fasst die Ursachen und Einflüsse, die auf die Messung wirken, zusammen. 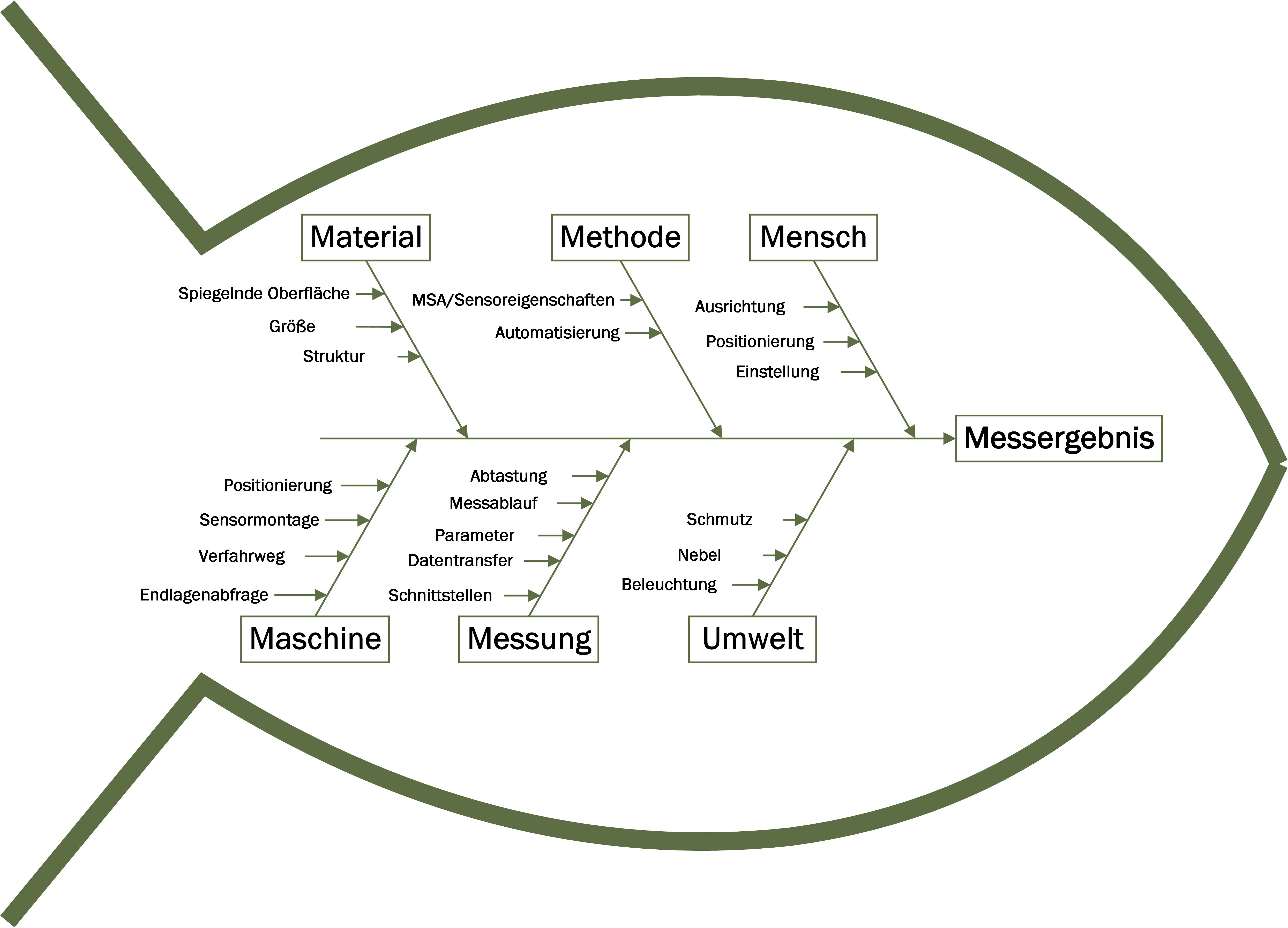
|
| 16ws_WA_Sensorarray/td> | Wintersemester 2016/2017 |