Zu Beginn muss das Programm über Visual Studio als Projekt geladen
und im Debuggmodus gestartet werden. Es erscheint die nachfolgende
Abbildung (Abb.24) mit einigen Informationenen zu den Entwicklern und dem
Projekt. Über die Taste “Start” wird das Infofenster geschlossen
und das Hauptfenster “Main Menu” angezeigt.
Abb.24 Startbildschirm
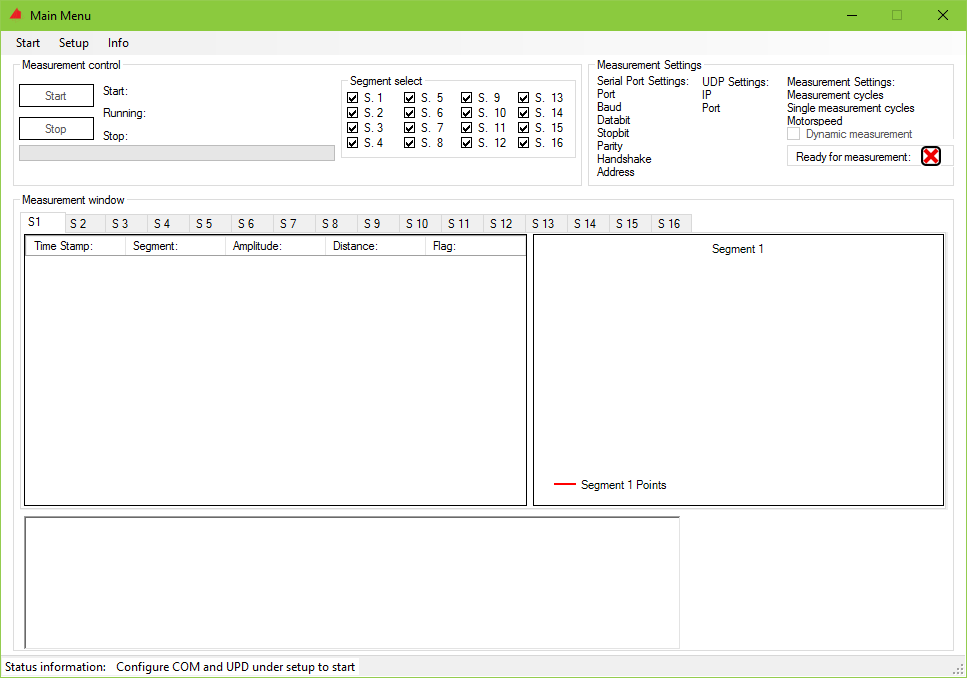
Im oberen rechten Bereich
werden die aktuellen Einstellungen, sowie der Status der Einstellungen
angezeigt. Im Bereich “Measurement Window” können auf der linken
Seite während der Messung die aktuellen Messwerte pro Segment eingesehen
werden. Auf der rechten Seite wird ein Graph gezeichnet, der die
Messwerte abbildet. Unterhalb dieser beiden Anzeigen werden aktuelle
empfangenen Rohdaten abgebildet. Über die obere Zugriffsleiste gelangt
man zum “Setup”. (Abb.25)
Abb.25 Hauptmenü
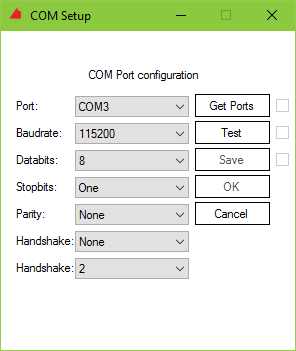
Im “Setup” ist es nun
unter “Com Setup” möglich die Schnittstelle zum Sensor zu parametrieren.
Hierbei können für das Sensorarray die voreingestellten Werte übernommen
werden, bis auf den untersten Handshake. Dieser muss händisch auf
“2” gesetzt werden. Somit wird die richtige Adresse beim Modbus
zur Kommunikation verwendet. Nachdem die Einstellungen getätigt
wurden, muss auf der rechten Seite die Tasten “Test”, “Save” und
“OK” gedrückt und bestätigt werden. Nun ist der Com-Port richtig
konfiguriert.(Abb.26)
Abb.26 COM-Setup
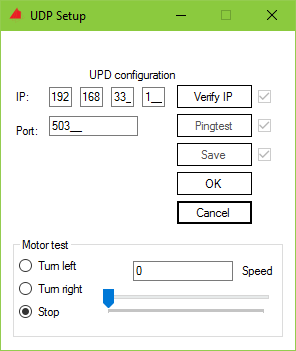
Als nächstes muss unter “Setup” das
“UDP Setup” parametriert werden. Über die den Taster “Verify IP”
kann die eingestellte IP-Adresse verifiziert werden und mit der
der nächsten Taste “Test” überprüft und mit “Save” gespeichert werden.
Im unteren Bereich kann nun der Motor der Kameraschiene getestet
werden. Nachdem die Verifikation und der Test abgeschlossen ist,
wird über “OK” das Setup verlassen. (Abb.27)
Abb.27 UDP-Setup
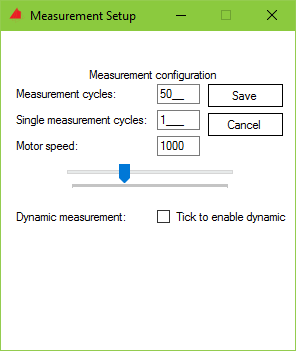
Als letztes
müssen noch über “Setup” und “Measurement Setup” die Rahmenbedingungen
für die Messung eingestellt werden. Zusätzlich kann hier neben den
Messzyklen und der Motorgeschwindigkeit auch eine Auswahl über eine
dynamische Messung erfolgen. Wenn alle Parameter angepasst sind,
kann über “Save” das Setup verlassen werden. (Abb.28)
Abb.28 Messungseinstellung
Im Hauptfenster wird nun im oberen “Measurement Settings”-Bereich
die eingestellten Parameter abgebildet und angezeigt, ob das System
bereit für eine Messung ist. Ist dies der Fall kann über die Taste
“Start” die Messung gestartet und im “Measurement Window” verfolgt
werden. Nachdem die Messungen fertig ist erscheint ein Hinweis,
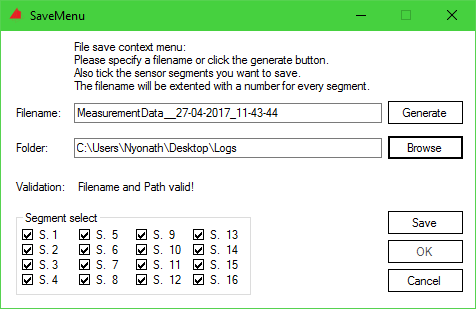
dass die Messung gespeichert werden kann. Über die obere Zugriffsleiste
und dem Reiter “Start” gelangt man zu der Funktion ”SaveMenu”. Hier
kann die Messung gespeichert werden. Über den Bereich “Segment select”
kann man auswählen, welche Segmente gespeichert werden sollen. Mit
Hilfe von “Generate” wird automatisch ein Name für die Dateien erzeugt.
Jedes Segment bekommt zusätzlich noch ihre Segmentnummer im Namen
hinzugefügt. Zuletzt muss über “Browse” ein Speicherort festgelegt
werden. Mit “Save” werden nun die einzelnen ausgewählten Segmente
mit ihrem spezifischen Namen als separate CSV-Dateien unter dem
angegebenen Speicherort abgelegt. (Abb.29)
Abb.29 Datenspeicherung
Im nachfolgenden Video sind die einzelnen Schritte nochmal nachvollziehbar dargestellt.