Fischertechnik bietet für seine Fahrzeuge zwei Motoren an. Auf der
einen Seite die leistungsstarken Getriebemotoren, welche nur über
eine Spannungsversorgung verfügen und die Fischertechnik -
Encodermotoren, welche zusätzlich über einen Encoderausgang
verfügen. Mit Hilfe der Software RoboPro kann der Encoder ausgelesen
werden. RoboPro bietet einige Funktionen in direkter Verbindung mit
dem Encoder an.
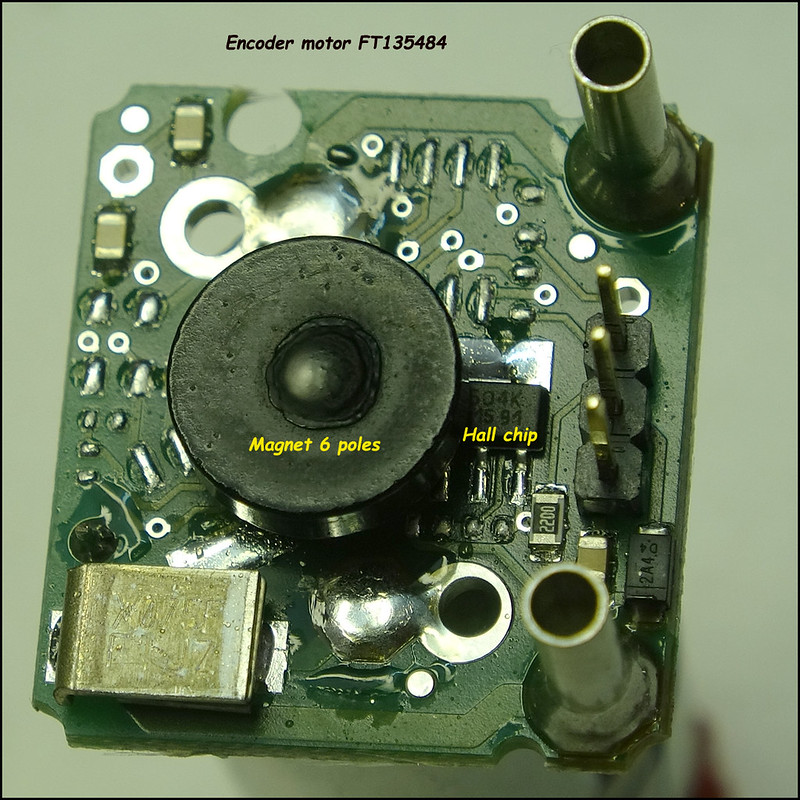
Bei dem verbauten Encoder handelt es sich um
einen Hall-Sensor (HAL504) im SOT89B-1 Package (siehe Bild) und
einem Permanentmagneten, der auf der Motorwelle befestigt ist. Der
Permanentmagnet ist in jeweils drei Nord-/Südpole unterteilt. Der
Hall-Sensor schaltet bei dem magnetischen Südpol den Ausgang auf
„low“, andernfalls auf „high“. Das Encodersignal enthält somit keine
Information über die Drehrichtung der Motorwelle. Zudem verfügt der
Hall-Sensor über eine eingebaute Hysterese, die ein prellfreies
Ausgangssignal garantiert (siehe Datenblatt S. 5 und S. 26).
http://stefanbrunner.com/fischertechnik-tx-outputs/
Bild des Fischertechnik Encoders:
https://farm1.staticflickr.com/855/43893298022_fb598b8e61_c.jpg
Datenblatt HAL504:
http://www.smd-component.ru/webcatalog/description_files/49/hal5xx_4ds_micronas.pdf
Bild: Verwendeter Roboter - FT Discovery-Set
|
{kind=link}