Inbetriebnahme
-Batterie
an Aufbau anschließen: Rotes Kabel mit + verbinden. Grünes Kabel mit
- verbinden
-Stift Achsmittig positionieren
Ändern der Regelparameter
Die
Regelparameter können in Software geändert werden. Dafür muss der
Quellcode (s. Kapitel Quellcode) geöffnet werden. Nun kann man die
Regelparameter Kp, Ki und Kd anpassen.
Fahranweisungen angeben
Eine
neue Fahranweisung kann man in der loop()-Funktion des Programms
angeben. Dazu wird die Funktion setMotorSpeeds(Debug, turnSpeedM1,
turnSpeedM2, Ramp) aufgerufen.
Dieser übergibt man die
PWM-Stellwerte für beide Motoren. Außerdem kann man noch eine
Auswahl treffen, ob die Motoren mit einer Anfahrtsrampe oder ohne
betrieben werden sollen. Dies sieht dann für einen Stellwert von
1500 für beide Motoren und einen Betrieb mit Anfahrtsrampe wie folgt
aus:
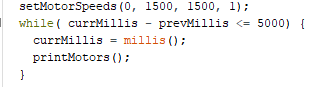
Die nachfolgende while-Schleife bestimmt die Zeitdauer, wie
lange die Motoren die gewünschte Operation ausführen. In diesem Fall
entspricht diese Zeit 5 Sekunden. Hier wurde absichtlich nicht die
Arduino-Funkiton delay() verwendet, da diese den Nachteil hat, dass
sie den kompletten Programmablauf blockiert. Mit der hier
verwendeten Methode ist es möglich, den Programmablauf nicht zu
blockieren und die Funktionalität weiterer Tasks nicht
einzuschränken. Ein weiteres Beispiel:
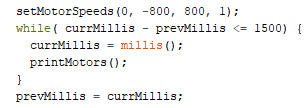
Dieses Mal erhält Motor 1 einen negativen PWM-Stellwert, das
zugehörige Rad wird sich nun rückwärts bewegen. Motor 2 erhält einen
positiven PWM-Stellwert. Beide fahren den Stellwert über eine Rampe
an. In diesem Fall wird diese Kreisbewegung für 1,5 Sekunden
ausgeführt.
|