|
1. Encoder
Die verwendeten Fischertechnikmotoren haben
einige Nachteile für den Einsatz im bestehenden Malroboter. Sie
benötigen sehr viel Bauraum und sind deutlich schwerer als die
bestehenden kleinen Motoren mit Schneckenantrieb des Malroboters.
Zum Einsatz im Malroboter und der
Verbesserung der Regelung könnte ein Encoder an der Motorwelle
angebracht werden. Hierfür kommen sogenannte „angular magnetic
encoder IC’s“ in Frage, bei welchen ein mehrpoliger Rundmagnet auf
der Motorwelle befestigt wird und gegenüber ein Hall-Sensor IC
befestigt wird. Damit lässt sich mit überschaubarem Aufwand ein
Encoder nachrüsten und zusätzlich die Encoderauflösung deutlich
steigern, da die Encoder IC’s üblicherweise 10-14 Bit
Positionsauflösung verfügen (siehe z. B. AM4096Q von RLS). Die
höhere Auflösung würde auch der Regelung zu Gute kommen.
Quelle:
http://www.sensorsportal.com/HTML/DIGEST/april_06/Rotary_Encoder_IC_PR.gif
Ein weiterer kritischer Punkt ist die
Integrierung der notwendigen Software in den bestehenden FT32 Code.
Da mehrere Tasks für die Regelung und der Auswertung der Encoder
benötigt werden, ist eine Integration in die bestehende FT32
Software nicht ohne weiteres durchzuführen, da der ESP32 damit
überfordert ist.
2. Mechanik
Beim derzeitigen Aufbau des Roboters werden
ausschließlich Teile von Fischertechnik verwendet. Dies sollte in
Zukunft überdacht werden. Es wäre sinnvoll, die Achsen des Fahrzeuges
durch stabilere Achsen zu ersetzen. Es scheint, dass die
Fischertechnik-Achsen dem Gewicht des Roboters nicht gewachsen sind,
trotz einer deutlichen Gewichtsreduktion unsererseits. Die geringe
Biegesteifigkeit der Achsen führt zu einem Sturz an beiden Rädern,
der Vergleich von linker und rechter Seite ist in den nachfolgenden
Abbildungen zu sehen:

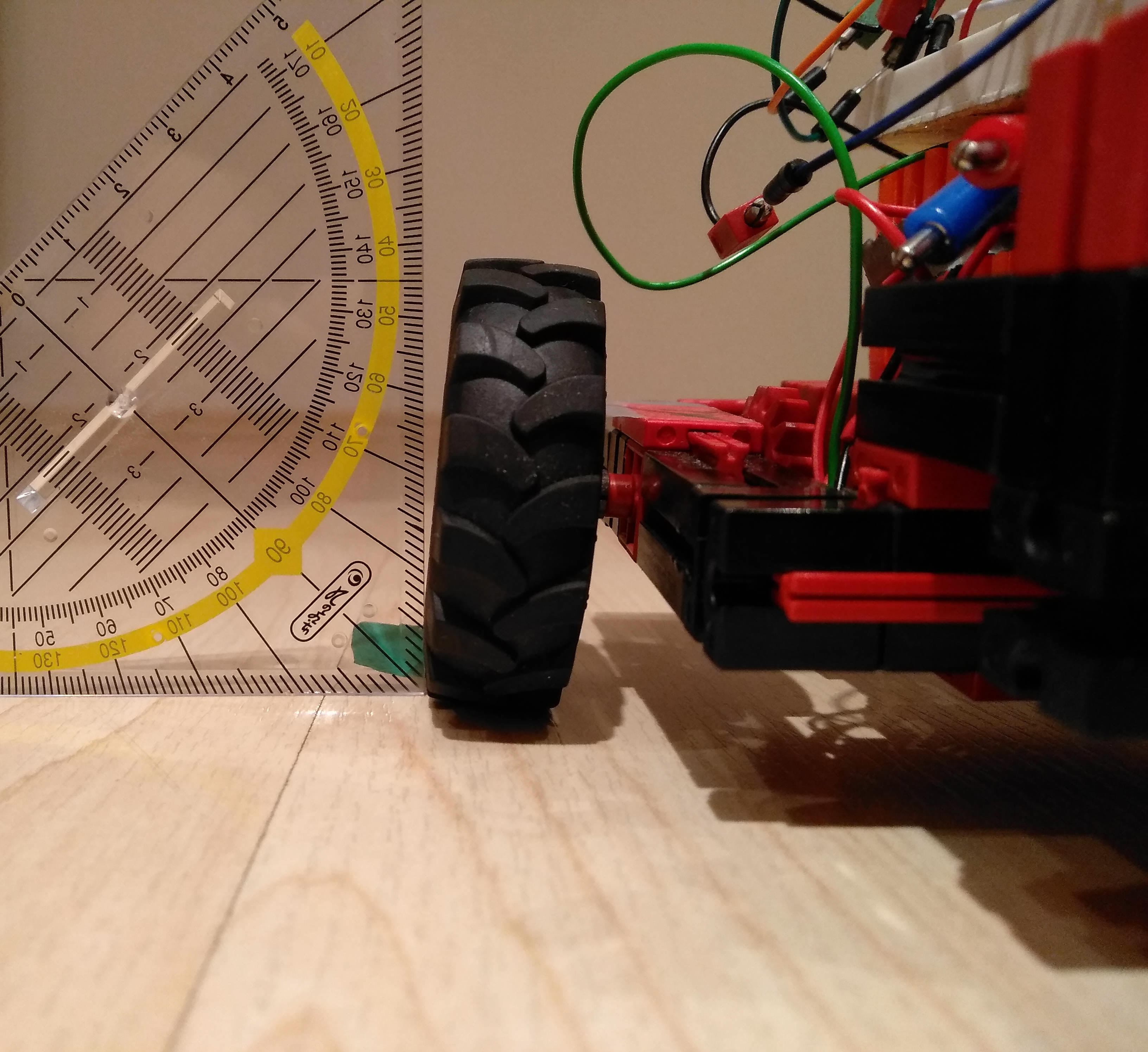
Radsturz links
Radsturz rechts
Es ist deutlich zu erkennen, dass der Sturz
auf der rechten Fahrzeugseite deutlich größer ist. Dies ist eine
zusätzliche Fehlerquelle, die den Geradeauslauf erschwert. Es ist
daher sinnvoll, die bestehenden Achsen durch biegesteifere Alternativen
zu ersetzen.
Ein weiteres Problem stellen die Zahnräder
dar, welche in diesem Roboter verwendet werden. Es gibt ein relativ
großes Zahnradspiel, welches von den Encodern nicht erfasst werden
kann und somit die Regelung der beiden Räder/Motoren zusätzlich
erschwert. Wir empfehlen daher für das nächste Fahrzeugkonzept
eigene Zahnräder mit geringerem Spiel zu verwenden oder gänzlich
auf die Zahradübersetzung zu verzichten.
|
{kind=link}